

Статистические методы и модели - Костин В.Н., Тишина Н.А
..pdfМатематическое ожидание и дисперсия для суммы равномерных законов на интервале [a, в] имеет вид:
M (x)= m(a +в) |
, |
σ 2 (x)= m(в−a)2 . |
(1.12) |
2 |
|
12 |
|
Если выбрать интервал [0,1], то математическое ожидание и дисперсия будут оцениваться по зависимостям:
M (R)= m |
, |
σ 2 (R)= |
m |
. |
(1.13) |
|
|||||
2 |
|
12 |
|
|
|
Для получения последовательности нормально распределенных случайных величин с заданными M (x) и D ( x ) мы должны использовать величину Zi, которая будет являться нормально распределенной случайной величиной, с параметрами N(0,1). Тогда случайная величина xi будет определять-
ся по формуле:
xi = M (x)+σ(x) Zi .
Пусть ξ1, ξ2, ..., ξm – |
независимые случайные величины, равномерно- |
||||||||
распределенные на отрезке |
[0,1], |
с M (ξ |
) |
=0,5 ; |
σ 2 (ξ |
i |
)=1 12 . Просуммируем |
||
независимые случайные величины: |
|
i |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
m |
|
|
m |
|
|
|
|
|
|
∑ξi = m + |
|
Zi , |
|
|
(1.14) |
|||
|
12 |
|
|
||||||
|
i=1 |
2 |
|
|
|
|
|||
отсюда нормированная величина будет иметь вид:
|
Zi = |
12 |
m |
m |
, |
(1.15) |
|
m |
∑ξi − |
|
|||
|
|
i=1 |
2 |
|
|
|
где |
m – количество реализаций. |
|
||||
При m → ∞ случайная величина Zi стремится к стандартной нормально распределенной случайной величине с нулевым математическим ожиданием и дисперсией равной 1.
На практике обычно берут m = 12, поэтому:
Z |
|
12 |
|
−6 . |
(1.16) |
i |
= ∑ξ |
i |
|||
|
i=1 |
|
|
11
Таким образом, моделирование случайной величины χ =N( a,σ ), имеющее нормальное распределение с параметрами аи σ , основано на использовании зависимости:
|
xi = a +σ Zi , |
(1.17) |
где |
Zi = N(0,1). |
|
1.3 Приближенный способ формирования случайной величины с произвольной функцией распределения
Случайная величина может быть задана дискретно. В этом случае интеграл от закона распределения не берется.
1 Способ формирования случайной дискретной величины. Предположим, что случайная величина x принимает следующие зна-
чения
x ; x |
|
;...; x |
|
||
x = 1 |
2 |
|
n |
. |
|
p |
; p |
2 |
;...; p |
|
|
1 |
|
n |
|||
n
Условие нормировки ∑pi =1.
i=1
Для реализации дискретного распределения берется отрезок единичной длины и разбивается на интервалы
y1 = p1,
y2 |
= p1 + p2 , |
K |
|
yn |
n |
= ∑ pi =1. |
|
|
i=1 |
Длина отрезков пропорциональна вероятности. Тогда вероятность того, что случайная величина примет случайное значение от a до в
в
p(a < x <в)= ∫ f (x)dx =в−а,
a
при условии, что внутри каждого интервала плотность распределения равна единице.
Вероятность того, что x примет значение yi−1 до yi будет равно
p(yi−1 < x < yi )= yi − yi−1 = p1 + p2 +...+ pi − p1 − p2 −...− pi−1 = pi ,
12
то есть, равна длине интервала yi − yi−1 или вероятности.
Формулируем случайную величину R, равномерно распределенную на интервале [0,1]. Определяем в какой интервал попадет R, затем по интервалу определяем вероятность и присваиваем ей значение, которое определено исходными данными (рисунок 1.5).
|
|
|
x1 |
|
|
|
|
|
|
|
|
xn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
|
|
x2 |
|
|
|
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
p1 |
|
|
|
p2 |
|
|
pn |
|||||
|
|
|
|
|
|
|
|
|
||||||
Рисунок 1.5 – Распределение вероятностей на интервале [0,1] |
||||||||||||||
Все точки в интервале p1 |
будут принимать значение x1 . Таким обра- |
|||||||||||||
зом, можно формировать любое дискретное распределение.
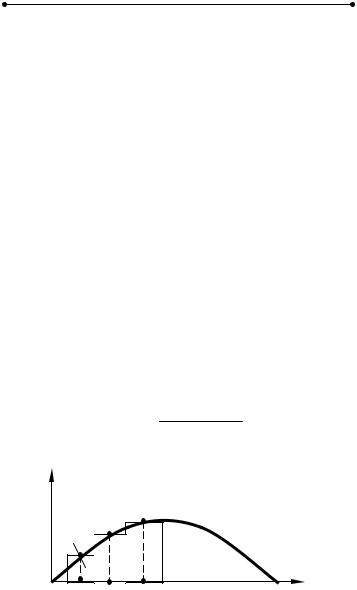
2 Способ формирования случайной величины x , заданной непрерывной функцией.
Допустим, непрерывная функция распределения может быть получена опытным путем, а аналитически описать ее не представляется возможным или результат описания опытного распределения не удовлетворяет исследователя. В этом случае используют данный способ.
На первом этапе определяем интервал изменения случайной величины до xmax . Весь интервал изменения случайной величины делится на n
равных интервалов ∆χ (рисунок 1.6)
∆χ = xmax −xmin .
n
f (x)
Si −1 |
|
|
|
|
0 ∆xi −1 |
Si Si +1 |
|
|
|
∆x ∆x |
+1 |
x |
||
|
i |
i |
|
|
Рисунок 1.6 – Произвольный закон распределения
На каждом интервале строим криволинейную трапецию, основание которой является ∆x , а верхняя часть кривая функции. В виду того, что ∆x → 0 , тогда площадь криволинейной i-ой трапеции определяется выражением:
13

Si ≈ ∆x |
fi (x)+ fi−1(x) |
. |
(1.22) |
|
2 |
||||
|
|
|
На каждом интервале строим прямоугольник, площадь которого эквивалентна площади элементарной криволинейной трапеции. Высота прямоугольника равна
Hi = ∆Six .
Теперь необходимо нормировать всю площадь под кривой из условия,
что
x∫n f (x)dx =1. |
(1.23) |
x0 |
|
Сумма всех площадей
n
S = ∑i=1 Si .
Нормализацию проводим по зависимости
Ωi = SSi ,
тогда, если сложить
n
∑Ωi =1.
i=1
Единичный интервал [0,1] разбиваем на интервалы, соответствующие нормированным площадям Ωi . Вероятность того, что случайная величина x
попадет в интервал p (yi−1 < x < yi )=Ωi .
Внутри каждого интервала случайная величина будет распределена равномерно при условии, что ∆x →0 .
Формирование случайной величины по заданному закону производится следующим образом:
1Генерируется случайная величина R, определяется интервал i, в котором приобретает значение формируемая случайная величина.
2Производится вторичное генерирование случайной величины R. Учитывая, что внутри каждого интервала случайная величина распределена равномерно, то по формуле равновероятного распределения получим
x = xi−1 +(xi − xi−1) R . |
(1.24) |
14
1.4 Общие сведения о цепях Маркова
1.4.1 Основные понятия марковских процессов
Марковские случайные процессы названы по имени выдающегося русского математика А.А. Маркова (1856-1922), впервые начавшего изучение вероятностной связи случайных величин и создавшего теорию, которую можно назвать “динамикой вероятностей”. В дальнейшем основы этой теории явились исходной базой общей теории случайных процессов, а также таких важных прикладных наук, как теория диффузионных процессов, теория надежности, теория массового обслуживания и т.д. В настоящее время теория марковских процессов и ее приложения широко применяются в самых различных областях таких наук, как механика, физика, химия и другие.
Благодаря сравнительной простоте и наглядности математического аппарата, высокой достоверности и точности получаемых решений особое внимание марковские процессы приобрели у специалистов, занимающихся исследованием операций и теорией принятия оптимальных решений.
Несмотря на указанную выше простоту и наглядность, практическое применение теории марковских цепей требует знания некоторых терминов и основных положений, на которых следует остановиться.
Марковские случайные процессы относятся к частным случаям случайных процессов (СП). В свою очередь, случайные процессы основаны на понятии случайной функции (СФ).
Случайной функцией называется функция, значение которой при любом значении аргумента является случайной величиной (СВ). По-иному, СФ можно назвать функцию, которая при каждом испытании принимает какойлибо заранее неизвестный вид.
Такими примерами СФ являются: колебания напряжения в электрической цепи, скорость движения автомобиля на участке дороги с ограничением скорости, шероховатость поверхности детали на определенном участке и так далее.
Как правило, считают, что если аргументом СФ является время, то процесс, основанный на такой функции, называют случайным. Существует и другое, более близкое к теории принятия решений, определение СП. При этом под случайным процессом понимают процесс случайного изменения состояний какой-либо физической или технической системы по времени или какому-либо другому аргументу.
Нетрудно заметить, что если обозначить состояние Si и изобразить зависимость Si (t), то такая зависимость и будет случайной функцией.
СП классифицируются по видам состояний Si и аргументу t. При этом
СП могут быть с дискретными или непрерывными состояниями или временем. Например, любой выборочный контроль продукции будет относиться к СП с дискретными состояниями ( S1 - годная, S2 - негодная продукция) и
дискретным временем (t1 , t2 - времена проверки). С другой стороны, случай
15

отказа любой машины можно отнести к СП с дискретными состояниями, но непрерывным временем. Проверки термометра через определенное время будут относиться к СП с непрерывным состоянием и дискретным временем. В свою очередь, например любая осциллограмма, будет записью СП с непрерывными состояниями и временем.
Кроме указанных выше примеров классификации СП существует еще одно важное свойство. Это свойство описывает вероятностную связь между состояниями СП. Так, например, если в СП вероятность перехода системы в каждое последующее состояние зависит только от предыдущего состояния, то такой процесс называется процессом без последействия (рисунок 1.7).
Зависимость Pi/i+1 = f (Si ) называют переходной вероятностью, часто
говорят, что именно процесс без последействия обладает марковским свойством, однако, строго говоря, здесь есть одна неточность. Дело в том, что можно представить себе СП, в котором вероятностная связь существует не только с предшествующими, но и более ранними ( Si−1, Si−2 ) состояниями, то есть
pi/i+1 = f (Si )
Si |
Si+1 |
Pi/i+1 = f (Si ,Si−1,Si−2 ) |
(1.25) |
Рисунок 1.7 – Схема процесса без последействия
Такие процессы также рассматривались А.А. Марковым, который предложил называть их в отличие от первого случая (простой цепи) - сложной цепью. В настоящее время теория таких цепей разработана слабо и обычно применяют так называемый процесс укрупнения состояний, путем математических преобразований, объединяя предшествующие состояния в одно.
Это обстоятельство должно обязательно учитываться при составлении математических моделей принятия решений.
Остановимся подробнее на понятии “марковской цепи”. Отметим, вопервых, что случайный процесс с дискретными состояниями и временем называется случайной последовательностью.
Если случайная последовательность обладает марковским свойством, то она называется цепью Маркова.
С другой стороны, если в случайном процессе состояния дискретны, время непрерывно и свойство последействия сохраняется, то такой случай-
ный процесс называется марковским процессом с непрерывным временем.
Еще одним условием описания модели является требование, чтобы вероятности переходов из состояния в состояние подчинялись экспоненци-
16

альному закону, то есть переход из состояния в состояние представляет собой пуассоновский поток.
Различают марковские системы по количеству состояний, в которых находится система: системы с конечным состоянием и системы с бесконечным состоянием.
Марковский СП называется однородным, если переходные вероятности Pi/i+1 остаются постоянными в ходе процесса и не зависит от номера ис-
пытания.
Модель марковской цепи может быть представлена в виде ориентированного взвешенного графа (рисунок 1.8).
P23
S2
P12
P21 |
P |
S 3 |
|
43 |
|
S |
P14 |
|
1 |
|
|
P41 |
S4 |
P44 |
|
|
Рисунок 1.8 – Ориентированный взвешенный граф
Вершины графа обозначают состояние Si , а дуги – переходные веро-
ятности.
Множество состояний системы марковской цепи, определенным образом классифицируется с учетом дальнейшего поведения системы.
1 Невозвратное множество (рисунок 1.9).
Рисунок 1.9 – Невозвратное множество
В случае невозвратного множества возможны любые переходы внутри этого множества. Система может покинуть это множество, но не может вернуться в него.
17
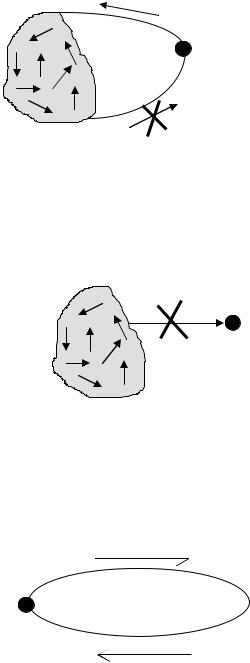
2 Возвратное множество (рисунок 1.10).
Рисунок 1.10 – Возвратное множество
В этом случае также возможны любые переходы внутри множества. Система может войти в это множество, но не может покинуть его.
3 Эргодическое множество (рисунок 1.11).
Рисунок 1.11 – Эргодическое множество
В случае эргодического множества возможны любые переходы внутри множества, но исключены переходы из множества и в него.
4 Поглощающее множество (рисунок 1.12)
Si |
P =1 |
|
ii |
Рисунок 1.12 – Поглощающее множество
При попадании системы в это множество процесс заканчивается. Кроме описанной выше классификации множеств различают состоя-
ния системы:
18

а) существенное состояние (рисунок 1.13): возможны переходы из Si в S j и обратно;
Pij >0
Si 
 S j
S j
Pij >0 ;
Рисунок 1.13 – Существенное состояние
б) несущественное состояние (рисунок 1.14): возможен переход из Si в S j , но невозможен обратный.
Pij >0
Рисунок 1.14 – Несущественное состояние
В некоторых случаях, несмотря на случайность процесса, имеется возможность до определенной степени управлять законами распределения или параметрами переходных вероятностей. Такие марковские цепи называются управляемыми. Очевидно, что с помощью управляемых цепей Маркова (УЦМ) особенно эффективным становится процесс принятия решений, о чем будет сказано впоследствии.
Основным признаком дискретной марковской цепи (ДМЦ) является детерминированность временных интервалов между отдельными шагами (этапами) процесса. Однако часто в реальных процессах это свойство не соблюдается и интервалы оказываются случайными с каким-либо законом распределения, хотя марковость процесса сохраняется. Такие случайные последовательности называются полумарковскими.
Кроме того, с учетом наличия и отсутствия тех или иных, упомянутых выше, множеств состояний марковские цепи могут быть поглощающими, если имеется хотя бы одно поглощающее состояние, или эргодическими, если переходные вероятности образуют эргодическое множество.
19

В свою очередь, эргодические цепи могут быть регулярными или циклическими. Циклические цепи отличаются от регулярных тем, что в процессе переходов через определенное количество шагов (циклов) происходит возврат в какое-либо состояние. Регулярные цепи этим свойством не обладают. Если просуммировать все вышесказанные определения, то можно дать следующую классификацию марковских процессов (рисунок 1.15):
с дискретным временем |
с непрерывным временем |
||
однородные |
|
неоднородные |
|
|
|
|
|
|
|
Марковские |
|
управляемые |
|
процессы |
неуправляемые |
|
|
|
|
марковские цепи |
|
полумарковские цепи |
|
простые сложные
поглощающие эргодические
регулярные циклические
Рисунок 1.15 – Классификация марковских процессов
1.4.2 Переходные вероятности. Матрица перехода
Переход системы из состояния в состояние будем рассматривать в дискретные моменты времени.
Система считается заданной, если заданы два условия.
1 Заданы вероятности возможных состояний системы Pi (t) . Вероят-
ности нахождения в этих состояниях – это доли времени нахождения в каждом состоянии. Имеется вектор начальных вероятностей начального состояния системы
Pi (0 ) = ( P01 , P02 , ... , P0 n ) ,
описывающий начальное состояние системы.
2 Заданы условные вероятности переходов из состояния в состояние за время ∆t . Это вероятность перехода Pik (∆t) из i-го в k-ое состояние за
время ∆t (причем, чем больше ∆t , тем больше вероятность). Данные вероятности переходов задаются с помощью матрицы, которая имеет следующий вид:
20