

6.3.3. Автономные инверторы
В современных системах электропривода переменного тока практически повсеместно в качестве силовых регуляторов используются транзисторные автономные инверторы. Оконечный каскад трехфазного автономного инвертора содержит шесть транзисторов с обратными диодами. Основные принципы построения, управления и защиты таких схем были изложены выше.
Для управления трехфазными машинами переменного тока в электроприводе используется схема автономного инвертора (АИН), содержащая шесть транзисторных ключей VT1 – VT6 (рис. 6.46).
Статорные обмотки машины при питании от такого инвертора включаются либо по схеме «звезда», либо по схеме «треугольник». Как в первом, так и во втором случае переключение транзисторных ключей любой фазы инвертора (например, VT1, VT4) вызвав изменение напряжения на всех обмотках двигателя. Это обстоятельство сильно усложняет анализ электромагнитных процессов.
В настоящее время известно большое число различных способов управления силовыми ключами инвертора. Для сравнительной оценки различных схем и способов управления инвертором целесообразно разделить их на ряд групп, положив в основу деления структуру силовой цепи инвертора и регулируемые параметры результирующего пространственного вектора напряжения и тока ни выходе инвертора. В зависимости от структуры силовой цепи все инверторы подразделяются на два класса: инверторы с постоянной структурой силовой цепи и с переменной структурой силовой цепи.

Рис. 6.46. Выходной каскад АИН
В схемах первого класса управляющие сигналы подаются всегда на три силовых ключа, что обуславливает неизменность структуры силовой цепи. В схемах второго класса число ключей, на которые подаются управляющие сигналы, может быть меньше трех.
Простейшим способом управления транзисторными ключами VT1 – VT6 инвертора, обеспечивающим неизменность структуры силовой цепи, является способ с = 180° (рис. 6.47).
Здесь в течение 1/6 периода выходного напряжения (в течение периода повторяемости ТПВТ) включены три транзисторных ключа. Последовательность управления ключами следующая: 123, 234, 345, 456, 561, 612.
Простейшими способами управления транзисторными ключами, при которых изменяется структура силовой цепи инвертора, являются способы с = 120° и = 150°. Последовательность управления транзисторными ключами при = 120° следующая: 12, 23, 34, 45, 56, 61. При = 150° транзисторные ключи переключаются в такой последовательности: 12, 123, 23, 234, 34, 345, 45, 456, 56, 561, 61, 612. Общим недостатком этих способов является необходимость применения управляемого выпрямителя для изменения напряжения на выходе инвертора.
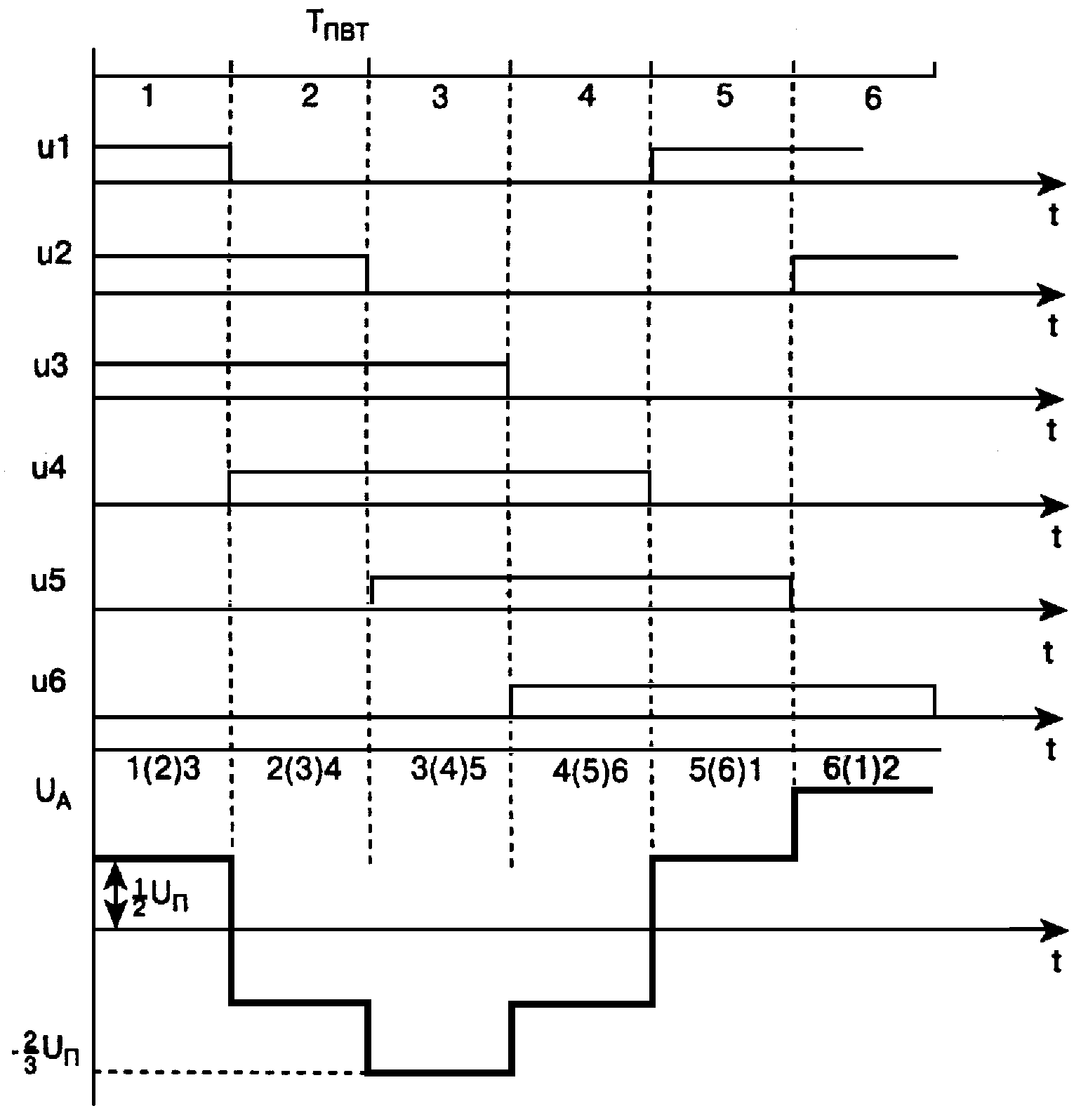
Рис. 6.47. Алгоритм управления АИН с = 180°
Рассмотрение
сложных способов управления удобно
осуществить, пользуясь понятием
результирующего (пространственного)
вектора. Пространственные векторы
напряжения
![]() и
и
![]() тока на выходе инвертора определяются
уравнениями:
тока на выходе инвертора определяются
уравнениями:
![]() (3.8)
(3.8)
где![]() .
.
Например, при управлении с = 180° и соединении обмоток машины переменного тока звездой вектор напряжения равен
![]() , (3.9)
, (3.9)
где l – номер интервала (целые числа 1, 2, 3, ...);
Un – напряжение питания инвертора.
Из уравнения (3.9) видно, что пространственный вектор статорного напряжения постоянен на интервале и скачкообразно изменяет фазу при переключении с интервала на интервал. При управлении с = 180° на периоде выходного напряжения АИН укладываются шесть периодов повторяемости TПВТ, каждому из которых соответствует определенное сочетание включенных полупроводниковых приборов инвертора и положение пространственного вектора .
К другому типу относятся инверторы с = 120°, 150° и регулированием напряжения на входе. При этих способах управления в схеме выходного каскада образуются ветви, замыкающиеся только через диоды обратного моста, обладающие односторонней проводимостью. Структура выходной цепи такого инвертора будет зависеть от направления тока в этих ветвях. В свою очередь момент изменения тока в той или иной ветви схемы зависит от характера нагрузки. Поэтому форма выходного напряжения при = 120° также зависит от характера нагрузки. При = 120° структура силовой цепи остается неизменной, если cos H 0,55; форма напряжения на обмотке двигателя в этом случае аналогична форме с = 180°, а результирующий вектор напряжения описывается выражением (3.9).
Ко второй группе относятся инверторы с ШИР на основной и несущей частоте. Рассмотрим наиболее простой способ управления при ШИР на основной частоте. Эпюры напряжений на входе ключей VT1 – VT6 (рис. 6.46) напряжения на выходе АИН представлены на рис. 6.49.
В течение каждого периода повторяемости ТПВТ для подключения нагрузки к источнику питания отпираются три транзисторных ключа (например, VT1, VT2, VT3); для отключения нагрузки от источника один из них запирается. Причем запирается тот ключ, который позволяет отключить всю группу анодных или катодных силовых ключей. Так, для отключения нагрузки при отпертых ключах VT1, VT2, VT3, запирается ключ VT2, а при отпертых ключах VT2, VT3, VT4 – ключ VT3 и т. д. Такой способ управления называется алгоритмом одиночного переключения (АОП).
Широтно-импульсное регулирование напряжения на выходе АИН на основной частоте и АОП осуществляется изменением относительной продолжительности включения нагрузки в цепь источника питания. Имеется и другая возможность ШИР на основной частоте, когда в паузе между импульсами запираются два силовых ключа одной группы, тем самым реализуется так называемый алгоритм группового переключения (АГП). Здесь при отпертых VT1, VT2, VT3 для создания паузы в напряжении на нагрузке запираются VT1 и VT3.

Рис. 6.49. Управление АИН при ШИР на основной частоте
При алгоритме группового переключения создается пауза в напряжении на нагрузке, если к моменту запирания двух транзисторных ключей одной группы, ток изменит знак. Это имеет место при малых постоянных времени нагрузки Н. Если значение Н велико к рассматриваемому моменту ток знака не изменит, то паузу в выходном напряжении сформировать не удается.
Обратясь
к рис. 6.48, нетрудно показать, что
регулирование напряжения на выходе
АИН, возможно пока мгновенная разность
фаз между изображающими векторами![]() .
Алгоритм одиночного переключения
способен формировать паузу в выходном
напряжении инвертора при любых значениях
.
Алгоритм одиночного переключения
способен формировать паузу в выходном
напряжении инвертора при любых значениях![]() ,
однако в системах электропривода при
переходе асинхронного двигателя в
генераторный режим с рекуперацией
энергии в источник питания, ни АГП, ни
АОП не формируют паузу в выходном
напряжении, поэтому преимущества АОП
проявляются лишь в режимах потребления
энергии асинхронным двигателем.
,
однако в системах электропривода при
переходе асинхронного двигателя в
генераторный режим с рекуперацией
энергии в источник питания, ни АГП, ни
АОП не формируют паузу в выходном
напряжении, поэтому преимущества АОП
проявляются лишь в режимах потребления
энергии асинхронным двигателем.
Если реализовать постоянную структуру в инверторе, то отмеченные особенности исключаются. Для этого необходимы дополнительные переключения транзисторных ключей в каждой фазной группе. Пример такого управления для АОП представлен на рис. 6.49 штриховыми линиями. Здесь при запирании ключа VT2, отпирается ключ VT5, при запирании ключа VT3, отпирается ключ VT6 и т. д.
При ШИР на основной частоте гармонический состав выходного напряжения и тока резко ухудшается в области малых напряжений и частот. Для исключения этого нежелательного явления, используется широтно-импульсное регулирование на несущей частоте. В этом случае в течение периода частоты повторяемости ТПВТ несколько раз с периодом Т0 происходит включение и отключение одного из силовых ключей (рис. 6.50).
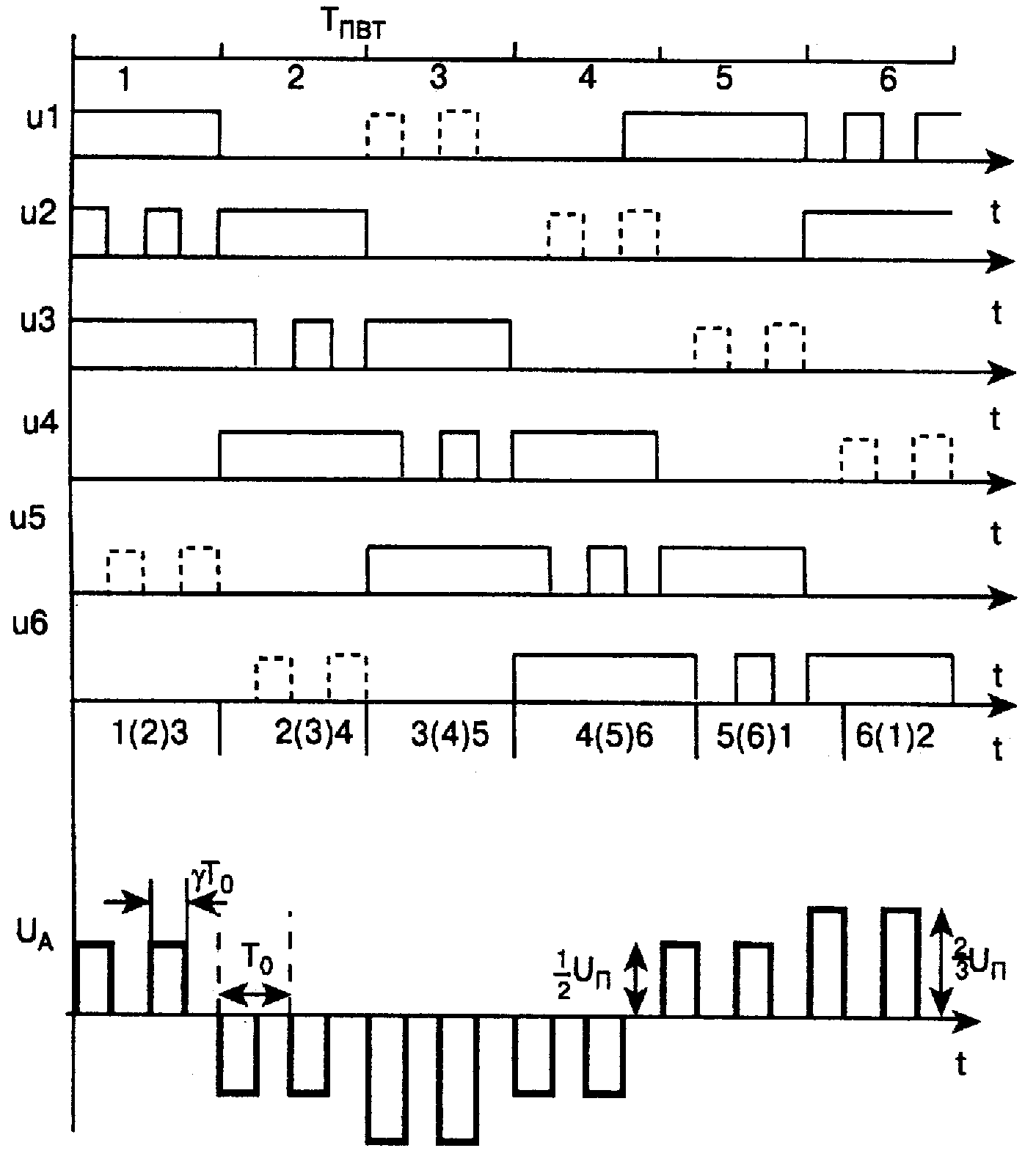
Рис. 6.50. Управление АИН при ШИР на несущей частоте
При этом обмотки двигателя оказываются подключенными к источнику питания на интервале Т0, а на интервале (1 – )Т0 они отключены и закорочены. На рис. 6.50 представлен случай, когда ТПВТ = 2Т0. Гармонический состав выходного напряжения при ШИР на несущей частоте, улучшается с увеличением кратности
![]() . (3.12)
. (3.12)
Однако большие значения k трудно реализовать.
Улучшение гармонического состава выходного напряжения осуществляется при переходе к широтно-импульсной модуляции.
Рассмотрим типичный для ШИМ способ управления АИН. Сущность этого способа поясняется рис. 6.51, где показаны законы управления ключами и выходное напряжение на фазе «А».

Рис. 6.51. Управление АИН при ШИМ на несущей частоте
В интервале от 0 до 2/3 на управляющий вход транзисторного ключа (например, VT1) подается постоянный отпирающий сигнал, а в интервале от 2/3 до – широтно-модулированный сигнал – 4 импульса, длительность которых линейно убывает. Аналогичные сигналы, но с соответствующим фазовым сдвигом, подаются на входы остальных ключей. При данном способе управления, сигналы подаются поочередно то на два, то на три транзисторных ключа. Такой алгоритм управления несет в себе возможность изменения структуры силовой цепи. Действительно, исследования показали, что неизменность структуры сохраняется пока cos Н 0,87.
При
запирании ключа VT1, изображающий
вектор
переходит из положения 2 в положение 3
(рис. 6.48). В течение импульса 1 ключ VT1
отперт, поэтому
![]() и ср = 0. Три
четверти периода импульса 2 ключ VT1
отперт, а четверть периода он заперт.
и ср = 0. Три
четверти периода импульса 2 ключ VT1
отперт, а четверть периода он заперт.
Поэтому
здесь
![]() и
и![]() .
.
Длительность
импульса 3 будет![]() ,
а четвертого
,
а четвертого![]() .
При этом средняя фаза изображающего
вектора напряжения принимает
последовательно значения 0; 14°; 30°; 46°.
.
При этом средняя фаза изображающего
вектора напряжения принимает
последовательно значения 0; 14°; 30°; 46°.
Таким образом, изображающий вектор , перемещаясь между положениями 2 и 3 (рис. 6.48), занимает некоторые промежуточные положения, отличающиеся друг от друга средней фазой. Чем больше этих промежуточных положений, тем ближе к синусоиде напряжение на выходе инвертора.
Для того, чтобы построить схемы инверторов с неизменной структурой, необходимо после запирания очередного ключа, отпирать другой ключ той же фазной группы инвертора. Так, при запирании ключа VT1, следует отпереть ключ VT4. При этом электромагнитные процессы не будут зависеть от коэффициента мощности нагрузки.
Оптимальный алгоритм управления транзисторными ключами АИН заключается в многократном переключении ключей только одной фазы в течение 1/6 периода выходного напряжения инвертора. Действительно, соседние состояния результирующего вектора напряжения (например, 2 и 3 на рис. 6.51) отличаются тем, что во втором состоянии отперт ключ VT1, а в третьем – ключ VT4. Поэтому для того, чтобы средняя фаза результирующего вектора могла принимать промежуточные значения между 0 и /3, необходимо на рассматриваемом интервале переключать только ключи VT1 и VT4, на следующем – ключи VT2, VT5 и т. д. Для изменения среднего модуля результирующего вектора (формированием паузы в выходном напряжении) следует в состоянии 2 запереть ключ VT2 и отпереть ключ VT5; в состоянии 3 запереть ключ VT3 и отпереть ключ VT6; в состоянии 4 запереть ключ VT4 и отпереть ключ VT1 и т. д. Таким образом, на основании поведения результирующего вектора разрабатывается способ управления транзисторными ключами инвертора, который легко реализуется с помощью цифровой микросхемотехники.
В последнее время в связи со значительными достижениями технологии изготовления силовых транзисторов, практически повсеместно стали использоваться алгоритмы с синусоидальной ШИМ. Методы широтно-импульсной модуляции напряжения выходе автономного инвертора реализуются в разомкнутых и замкнутых системах. Разомкнутый способ реализации ШИМ в одной фазе иллюстрирует рис. 6.52.
Генератор пилообразного напряжения (ГПН) генерирует напряжение пилообразной формы высокой частоты. Это напряжение сравнивается с синусоидальным напряжением, частота и величина которого задается входным сигналом. При рассмотренном способе модуляции инвертор представляет собой регулируемый источник напряжения.
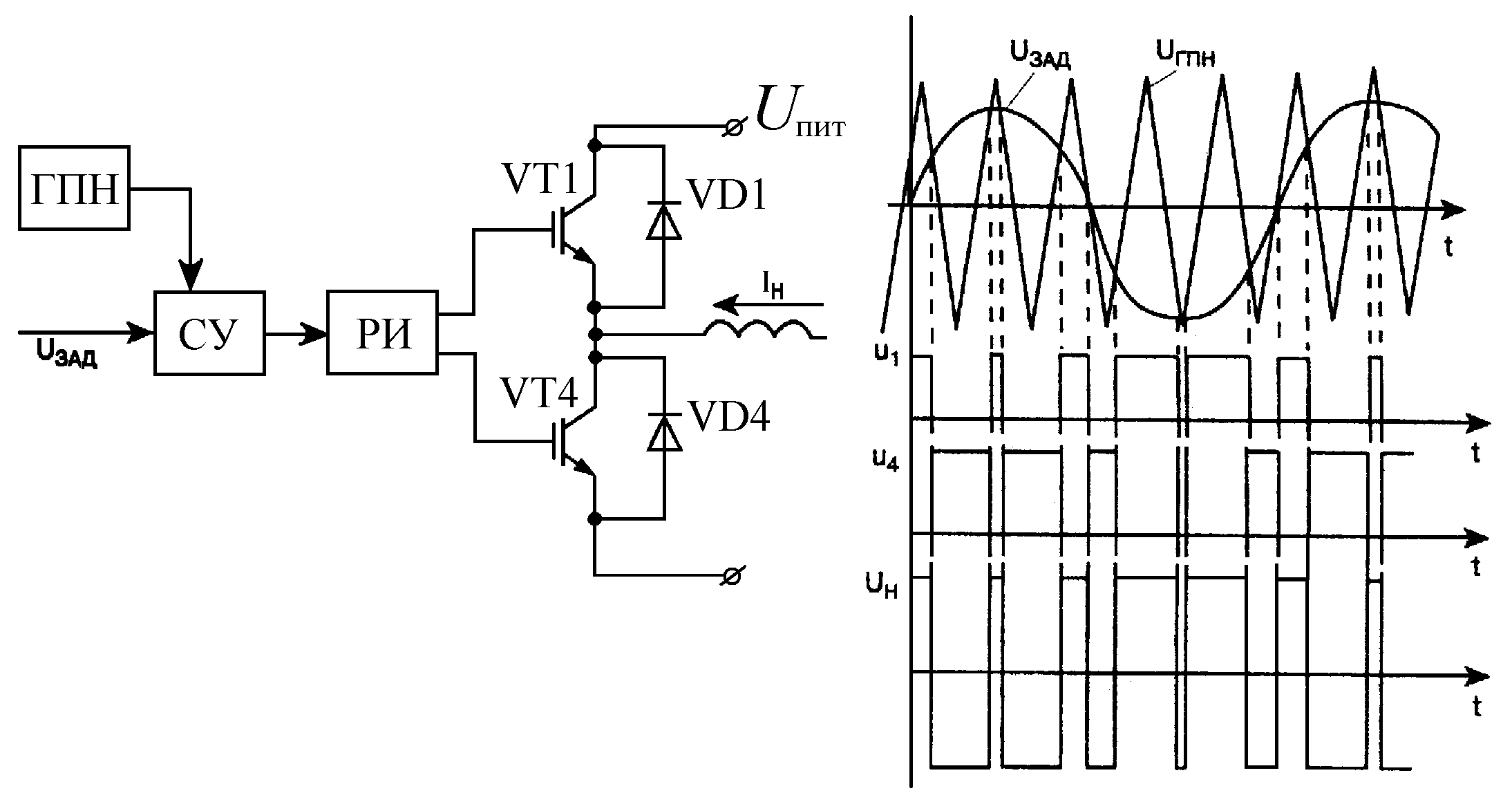
Рис. 6.52. Реализация ШИМ в АИН
При построении замкнутого электропривода переменного тока часто используется замкнутый способ реализации ШИМ. Этот способ иллюстрирует рис. 6.53. Здесь за счет отрицательной обратной связи по току и релейного элемента (РЭ) ток в нагрузке пульсирует около заданного значения. Амплитуда и частота пульсаций определяется параметрами R, L активно-индуктивной нагрузки и шириной петли гистерезиса релейного элемента. Часто такой способ ШИМ называют «токовым коридором». При реализации «токового коридора» инвертор представляет собой источник тока, а управление электрической машиной в этом случае относится к частотно-токовому.
Устройства управления инвертором должны реализовать способ, который обеспечил бы удовлетворение двух основных требований, предъявляемых к системе преобразователь – машина переменного тока:
минимальные потери в двигателе и минимальные пульсации момента, обусловленных воздействием полей первой и высших гармоник;
минимальные потери в элементах преобразователя.

Рис. 6.53. Реализация «токового коридора» в АИН
Эти требования противоречивы. Так как для улучшения работы двигателя следует повышать несущую частоту, а для уменьшения потерь в преобразователе ее следует уменьшать; кроме того, двусторонняя энергетическая связь требует добавочных переключений в преобразователе. Компромисс в удовлетворении отмеченных требований находится на основании анализа электромагнитных процессов.