

6.1.6. Синхронный двигатель как элемент исполнительных механизмов
Синхронные электрические машины являются наиболее перспективными. Сегодня уже имеются разработки бесконтактных синхронных машин, обладающие улучшенными на порядок массогабаритными показателями. Эти машины имеют совершенно новую, нетрадиционную конструкцию и очень широкие возможности.
Основной отличительной особенностью синхронных машин является то, что поле ротора в них неподвижно относительно ротора и вращается синхронно с ним. В синхронных электромагнитных и магнитоэлектрических машинах это собственное поле возбуждения. В синхронных реактивных – это поле, которое пронизывает ротор.
Машины с электромагнитным возбуждением и явно выраженными полюсами тесно связаны с энергетикой и практически не используются в электроприводе. Теория этих машин подробно изложена в классических курсах по электрическим машинам. Поэтому в дальнейшем они не рассматриваются.
В магнитоэлектрических машинах деление касается скорей способа управления, нежели принципа работы.
Обмотки статора машины могут быть запитаны синусоидальным напряжением (током), квазисинусоидальным напряжением (током) (ШИМ по синусоидальному закону) и импульсным напряжением (током), как например шаговые двигатели. В них обмотки статора запитываются импульсным напряжением (током). От каждого импульса ротор двигателя совершает шаг – поворот на определённый угол. Шаговый двигатель (ШД) – это уже синхронный двигатель вместе с полупроводниковым преобразователем. Его характеристики зависят от способа построения и управления этого преобразователя.
Шаговые электродвигатели нашли свое применение как управляемые по скорости исполнительные устройства в системах подачи нити при петлеобразовании на трикотажных машинах, стабилизации линейной плотности ленты в вытяжных приборах, системах позиционирования автоматических манипуляторов и роботов и т.п., с их помощью осуществляется управление нитеподачей, оттяжкой готового трикотажного полотна, перемещением кареток и игольниц и т.д.
Из различных типов ШД можно выделить три основных типа электрических машин [21]. Это реактивные двигатели (рис. 6.15), двигатели с постоянными магнитами (рис. 6.16) и гибридные (рис. 6.17) ШД.
|
|
Рис. 6.15 |
Рис. 6.16 |

Для пояснения принципов его действия на рис. 6.18 приведено поперечное сечение простого реактивного ШД. Это трехфазный двигатель, статор которого имеет шесть зубцов. Каждые два зубца статора, отстоящие на 180° друг от друга, принадлежат одной фазе; катушки противоположных зубцов соединены последовательно или параллельно (на рис. 6.18 они соединены последовательно). Ротор имеет четыре зубца. Статор и ротор обычно изготавливают из шихтованного магнитомягкого материала, но часто используют и массивные роторы. Материал как статора, так и ротора должен обладать высокой магнитной проницаемостью и обеспечивать прохождение большого магнитного потока.
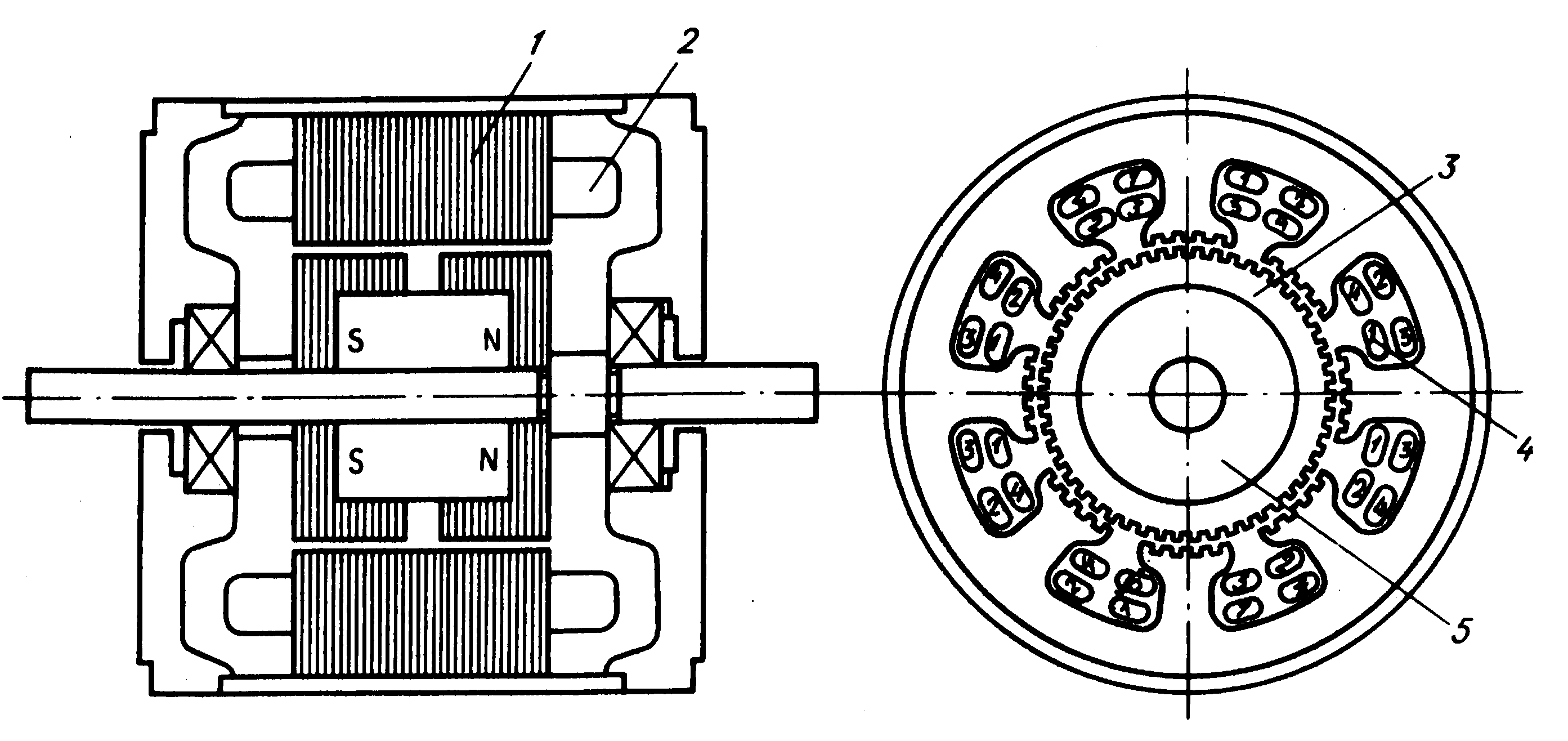
Рис. 6.17
Определим,
одинаковые или противоположные
направления намагничивания будут
иметь зубцы одной фазы статора.
Предположим, что в нашем примере они
имеют противоположные направления
намагничивания. Таким образом, на рис.
6.18 зубцы I, II
и III в возбужденном
состоянии представляют северный
магнитный полюс, а
![]() и
и
![]() –
южный.
–
южный.
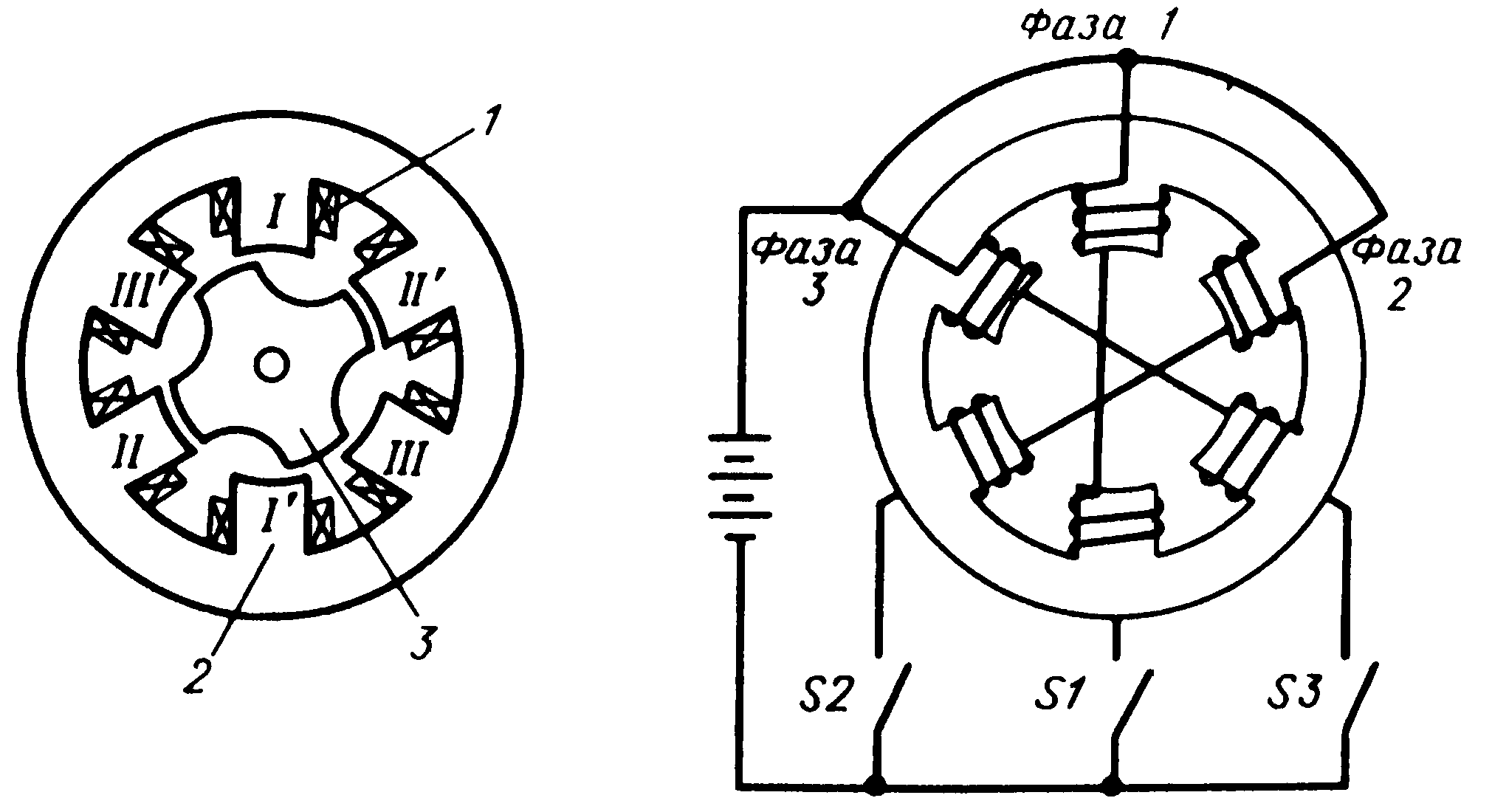
Рис. 6.18. Поперечное сечение трехфазного ШД и схема соединения обмоток: 1 – обмотка; 2 – статор; 3 – ротор
Ток в каждой фазе управляется в режиме включен/выключен (1/0) через соответствующие переключатели S1 – S3. Если ток подается в катушку фазы 2 или, другими словами, фаза 2 возбуждена, магнитный поток будет проходить, как показано на рис. 6.18. Ротор примет такое положение, что зубцы статора II и II' и какие-либо два зубца ротора установятся по одной линии. В этом случае магнитное сопротивление минимально, что обеспечивает положение равновесия. При переключении S2 на S3 ротор ШД займет новое положение. Таким образом последовательно переключая S1 – S3 ротор ШД будет совершать вращательное движение.
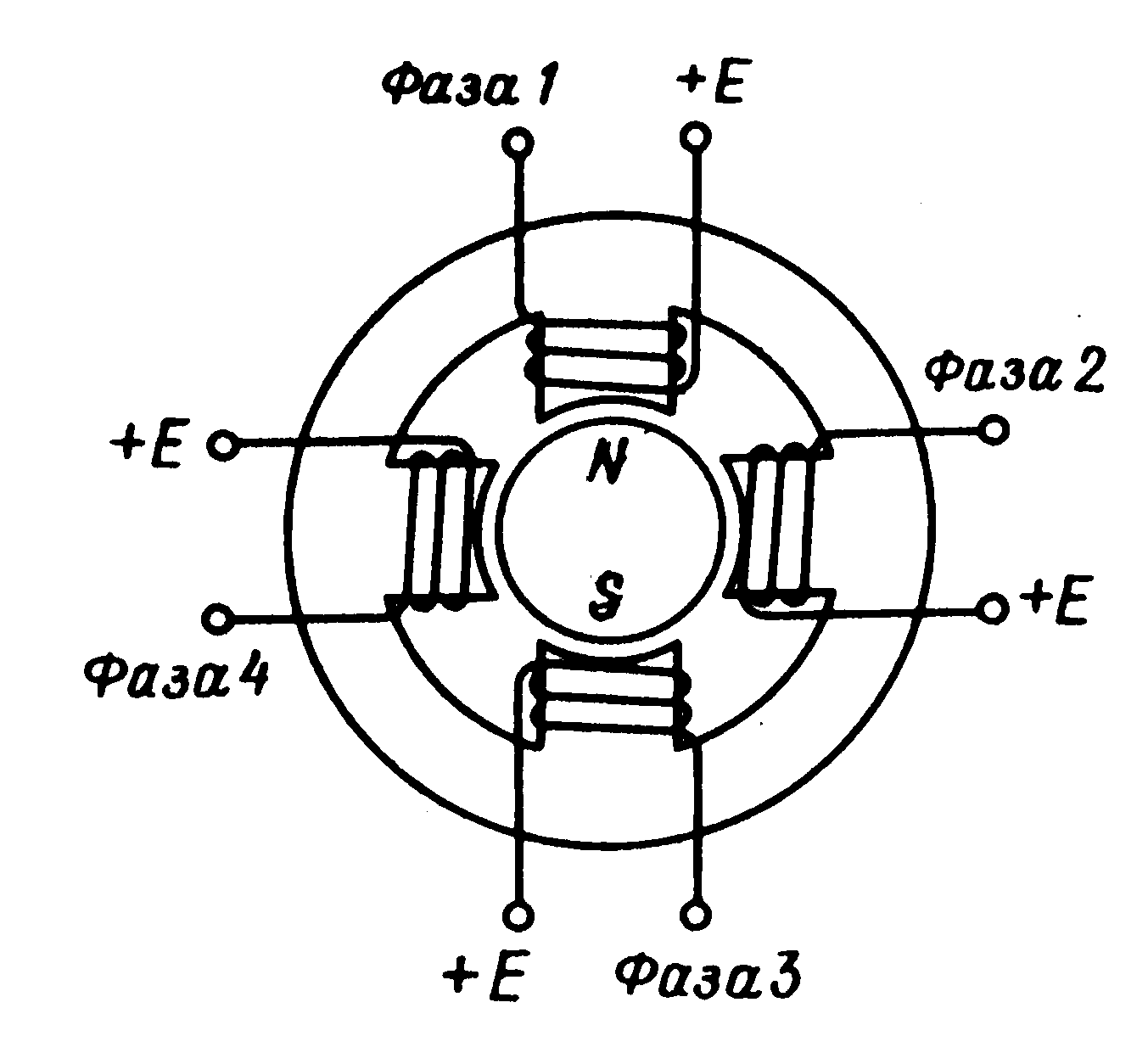
Конструкция ШД предопределила конфигурацию системы управления. Как правило, работой ШД управляет электронная схема, а питание его осуществляется от источника постоянного тока. На рис. 6.19 приведена структурная схема системы управления четырехфазным ШД [21].

Рис. 6.19. Структурная схема системы управления четырехфазным ШД
Сигнал, приходящий с задатчика шаговой частоты вращения 1 на логический блок 2, обеспечивает подачу сигнала управления на коммутатор (инвертор) 3, тем самым способствуя перемещению ротора ШД 4 на один шаг.
Логический блок – это электронная схема, управляющая последовательностью возбуждения фаз ШД, в соответствии с поступлением входных импульсов шаговой частоты. Обычно логический блок состоит из регистра сдвига и логических схем (например И-НЕ, ИЛИ-НЕ, и т.д.). В конкретном случае можно разработать необходимый логический блок подбором соответствующих интегральных схем: последовательной логики (JK- или D-триггеров с логическим входом, срабатывающий по обратному фронту сигнала управления) и интегральных комбинационных схем.
На рис. 6.20 представлена схема логического блока для двухфазного возбуждения четырехфазным ШД.
В данной схеме отсутствуют элементы И-НЕ, а основу логического блока составляют два D-триггера DD1.1 – DD1.2. Значения логической функции, реализуемой этим блоком, приведены в таблице 6.1.

Рис. 6.20
Таблица 6.1
Номер импульса управления |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
.... |
N-3 |
N-2 |
N-1 |
N |
Фаза 1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
|
1 |
1 |
0 |
0 |
Фаза 2 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
|
0 |
1 |
1 |
0 |
Фаза 3 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
|
0 |
0 |
1 |
1 |
Фаза 4 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
|
1 |
0 |
0 |
1 |
При двухфазном способе возбуждения обмоток фаз статора ШД колебания ротора затухают быстрее, чем при однофазном, что объясняется образованием замкнутого контура электромагнитной индукции, вследствие чего колебательные составляющие тока имеют противоположные фазы. Поскольку при однофазном возбуждении подобные замкнутые контуры не образуются, то колебания затухают только под действием трения. На рис. 6.21 представлена схема логического блока для однофазного возбуждения фаз четырехфазного ШД.
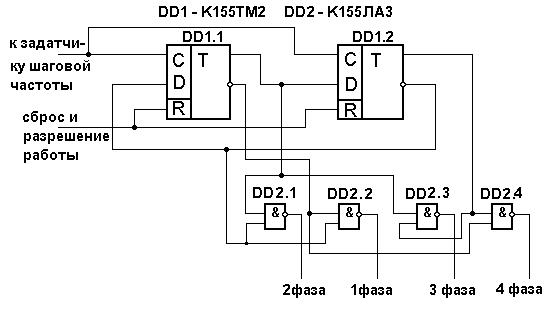
Рис. 6.21
Однофазный логический блок получается добавлением четырех логических схем И-НЕ DD2.1 – DD2.4 к выходам D-триггера DD1.1 – DD1.2. Значения логической функции, реализуемой этим блоком, приведены в таблице 6.2.
Таблица 6.2
Номер импульса управления |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
.... |
N-3 |
N-2 |
N-1 |
N |
Фаза 1 |
0 |
1 |
0 |
0 |
0 |
1 |
0 |
|
0 |
1 |
0 |
0 |
Фаза 2 |
0 |
0 |
1 |
0 |
0 |
0 |
1 |
|
0 |
0 |
1 |
0 |
Фаза 3 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
0 |
0 |
0 |
1 |
Фаза 4 |
1 |
0 |
0 |
0 |
1 |
0 |
0 |
|
1 |
0 |
0 |
0 |
Однако работа ШД при однофазном возбуждении характеризуется медленным затуханием колебания движения ротора при отработке шага.
Выходной сигнал с логического блока подается на вход силового инвертора (коммутатора), который усиливает сигналы включения обмоток двигателя по мощности.
Задачу отработки шаговой частоты вращения ротора ШД, рассчитанную центральным процессором может выполнить специальный контроллер, осуществляющий программируемое деление образцовой частоты, поступающей с кварцевого резонатора. В качестве задатчика частоты вращения можно использовать большую интегральную схему (БИС) программируемого таймера КР580ВИ53, предназначенную для формирования временных интервалов, длительность и период повторения которых управляется программно. БИС КР580ВИ53 содержит три одинаковых счетчика (таймера) с независимым управлением. Особенность счетчиков – многорежимность: любой из них может работать в шести режимах, в каждом из этих режимов возможны два способа задания коэффициента пересчета, который, в свою очередь, может быть либо двоичным, либо двоично-десятичным. Счетчики таймера КР580ВИ53 – 16 разрядные с предустановкой и работают на вычитание. Максимальный коэффициент пересчета (деления) соответствует загрузке в них всех нулей и составляет 65536 (216) при работе в двоичном коде (при тактовой частоте процессора 2 МГц самая низкая частота на выходе БИС составит 30,5 Гц). В предлагаемом способе использования БИС КР580ВИ53 работает в режиме 3 (меандр с делением тактовой частоты на задаваемый программно коэффициент пересчета) и в двоичном режиме задания коэффициента деления.
Предлагаемая система привода на основе шагового двигателя состоящая из микропроцессорного контроллера непосредственно управляющего последовательностью переключения инвертора представлена на рис. 6.22.

Рис. 6.22
Особенностью предложенной системы является отсутствие логического блока управления. Последовательность возбуждения фаз статора шагового двигателя, а также задание шаговой частоты осуществляется программно.
В микропроцессорном контроллере реализована система таймерного прерывания, суть которого состоит в том, программируемый таймер (ПТ) КР580ВИ53 получив от центрального процессорного устройства (ЦПУ) КР580ВМ80А коэффициент деления определяющий шаговую частоту, инициирует прерывание посредством контроллера (КП) КР580ВН59 на центральное процессорное устройство, выполняющего подпрограмму коммутации фаз.
Динамика синхронного электропривода (в том числе и ШД) при частотном управлении определяется электромагнитными переходными процессами в статорной и роторной цепях двигателя и механическими переходными процессами вращающихся масс.
При рассмотрении переходных процессов синхронного двигателя при частотном управлении в синхронном режиме в качестве основного допущения принимается, что фактическая скорость двигателя мало отличается от синхронной, определяемой частотой питающего переменного тока.
Уравнение движения ШД, описывающее изменение положение ротора электрической машины при возбуждении фазы (рис. 6.23), имеет следующий вид:
![]() ,
(6.12)
,
(6.12)
где J – момент инерции, НГм2
D – коэффициент вязкого трения, Нмсрад-1
Рдв – число пар полюсов
Ф – магнитный поток, Тлм2
W – число витков.

Рис. 6.23
Поскольку:
![]() ,
(6.13)
,
(6.13)
где 0 – текущее положение ротора
= const – требуемый угол поворота
уравнение (6.12) можно переписать с учетом (6.13) как:
 ;
;
или
 .
.
Используя преобразование Лапласа получим:
![]() ;
;
![]() ;
;
 .
.
Разделив числитель и знаменатель на J, получим:
 (6.14)
(6.14)
где
![]() –
собственная угловая частота двигателя
–
собственная угловая частота двигателя
Величина
![]()
называется коэффициентом демпфирования (затухания).
С учётом выражение (6.14) можно представить в виде:
![]() .
.
Как правило для < 1 (а для большинства ШД < 0,5) шаговая реакция ротора является колебательной (рис. 6.24).

Рис. 6.24
При двухфазном возбуждении ЭДС индукции, возникающая при движении ротора, создает равные и противоположно направленные токи в возбужденных фазах, которые вызывают эффект циркулирующего тока достаточно большого значения. Если движение ротора становится колебательным, то циркулирующий ток также будет иметь колебательный характер и вызовет потери в обмотках. Вследствие этого явления кинетическая энергия ротора рассеивается, переходя в тепловые потери. Этим объясняется хорошее демпфирование двигателя при двухфазном управлении.