

6.1.5. Трехфазный асинхронный двигатель как элемент исполнительных механизмов
В качестве трехфазных асинхронных исполнительных двигателей применяют асинхронные двигатели с массивным ротором. Они надежны в работе, просты в изготовлении, позволяют изменением подводимого к двигателю напряжения на статорную обмотку регулировать в диапазоне 20% частоту вращения ротора. В качестве регуляторов напряжения используют управляемые магнитные усилители, инверторы или преобразователи частоты. Механические характеристики двигателя с массивным ротором, полученные при различных напряжениях на статоре, приведены на рис. 6.12. Момент, развиваемый трехфазным асинхронным двигателем:
![]() , (6.7)
, (6.7)
где
![]() – угловая скорость поля статора; U
– напряжение на статоре; R1,
X1 – активное
и индуктивное сопротивления обмотки
статора; R'2,
X'2 –
активное и индуктивное сопротивления
ротора, приведенные к обмотке статора;
– угловая скорость поля статора; U
– напряжение на статоре; R1,
X1 – активное
и индуктивное сопротивления обмотки
статора; R'2,
X'2 –
активное и индуктивное сопротивления
ротора, приведенные к обмотке статора;
![]() –
скольжение ротора двигателя.
–
скольжение ротора двигателя.
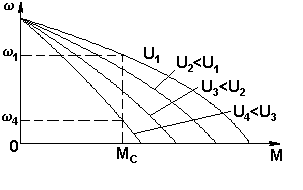
Рис. 6.12
Для зоны рабочих скольжений, когда S мало, в знаменателе выражения (6.7) можно пренебречь составляющими с S и S2.
Тогда уравнение момента двигателя представляется линейной зависимостью:
![]() . (6.8)
. (6.8)
Из уравнения (6.8) можно получить для установившегося режима Mд = Mс уравнение механической характеристики:
![]() ,
(6.9)
,
(6.9)
где ![]() – синхронная угловая скорость ротора;
– синхронная угловая скорость ротора;
f – частота питающего переменного тока;
P – число пар полюсов двигателя.
В соответствии с уравнением (6.9) на рис. 6.13 приведены механические характеристики трехфазного асинхронного двигателя в зоне рабочих скольжений (сплошные линии) при регулировании частоты f переменного тока на статоре (рис. 6.13, а), при регулировании напряжения U на статоре (рис. 6.13, б), при изменении числа пар полюсов Pдв=1 до Pдв=2 (рис. 6.13, в), при регулировании сопротивления в цепи ротора (рис. 6.13, г).
При определении передаточной функции трехфазного асинхронного двигателя пренебрегаем электромагнитными переходными процессами из-за их кратковременности по сравнению с механическими переходными процессами вращающихся масс. При этом электромеханические переходные процессы двигателя, управляемого напряжением на статоре, характеризуются уравнением:
![]() , (6.10)
, (6.10)
где
![]() – уравнение механической характеристики
в линейной её части;
– уравнение механической характеристики
в линейной её части;
MC() – механическая характеристика рабочей машины – рис. 6.14.

Рис. 6.13
1 – MC = const типична для подъёмных механизмов, транспортных установок;
2 –![]() – типична для мотальных установок;
– типична для мотальных установок;
3 –![]() – вентиляторная характеристика
– вентиляторная характеристика
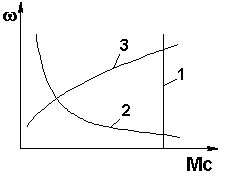
Рис. 6.14
В результате линеаризации уравнения (6.10) получим уравнение асинхронного двигателя в отклонениях переменных:
![]() ,
(6.11)
,
(6.11)
где выражения в скобках с индексом «0» представляют числа.
Линейное уравнение (6.11), преобразованное по Лапласу, запишем в операторной форме:
![]() ,
,
тогда передаточная функция:
![]() ,
,
где
 –
постоянная времени;
–
постоянная времени;
 – коэффициент усиления.
– коэффициент усиления.
Для
рабочих машин Мс =
const,
![]() и
значения параметров будут:
и
значения параметров будут:
 ;
;
 .
.
Если
рассматривать в качестве выходной
координаты угол поворота его вала, как
это имеет место в исполнительных
механизмах, и учитывая
![]() ,
передаточная функция двигателя будет:
,
передаточная функция двигателя будет:
![]() .
.
При определении передаточной функции трехфазного асинхронного двигателя управляемого изменением частоты переменного тока на статоре, пренебрегаем электромагнитными переходными процессами из-за их кратковременности по сравнению с механическими переходными процессами вращающихся масс, которые характеризуются уравнением:
![]() ,
,
где
![]() – уравнение механической характеристики
двигателя в линейной её части;
– уравнение механической характеристики
двигателя в линейной её части;
![]() –
синхронная угловая скорость при fН
= 50 Гц.
–
синхронная угловая скорость при fН
= 50 Гц.
Введем
следующие координаты, характеризующие
движение асинхронного двигателя при
частотном управлении:
![]() – относительная частота, fН
= 50 Гц, С
– синхронная угловая скорость при
частоте ,
– относительная частота, fН
= 50 Гц, С
– синхронная угловая скорость при
частоте ,![]() ,
,
![]() – фиктивное скольжение двигателя. При
этих условиях запишем следующие
соотношения для асинхронного двигателя:
– фиктивное скольжение двигателя. При
этих условиях запишем следующие
соотношения для асинхронного двигателя:
![]() .
.
Полагая, что между вращающим моментом двигателя и фиктивным скольжением SФ существует линейная зависимость:
![]() ,
,
запишем уравнение движения двигателя в отклонениях переменных при МС = const в виде:
![]() .
.
Преобразуем по Лапласу линейное дифференциальное уравнение при нулевых начальных условиях и запишем его в операторной форме:
![]() .
.
Произведя разделение переменных, после простых преобразований получим операторное уравнение в виде:
![]() ,
,
где
![]()
Передаточная функция асинхронного двигателя, управляемого изменением частоты переменного тока на статоре, будет:
![]() ,
,
что соответствует интегро-дифференцирующему звену.