

Глава 6. Исполнительные устройства и регулирующие органы систем автоматики
Исполнительные устройства (ИУ) предназначены для воздействия на процесс в соответствии с командной информацией от управляющего устройства. Выходным параметром ИУ является расход вещества или энергии, поступающих в объект регулирования, а входным – сигнал управляющего устройства [19].
Место исполнительного устройства в типовой структурной схеме системы регулирования показано на рис. 6.1. Правильный выбор и расчет исполнительных устройств имеет первостепенное значение, поскольку эти устройства являются конечными в цепях САУ любой сложности, вследствие чего, погрешности в работе ИУ непосредственно влияют на качество протекания автоматизируемого процесса.
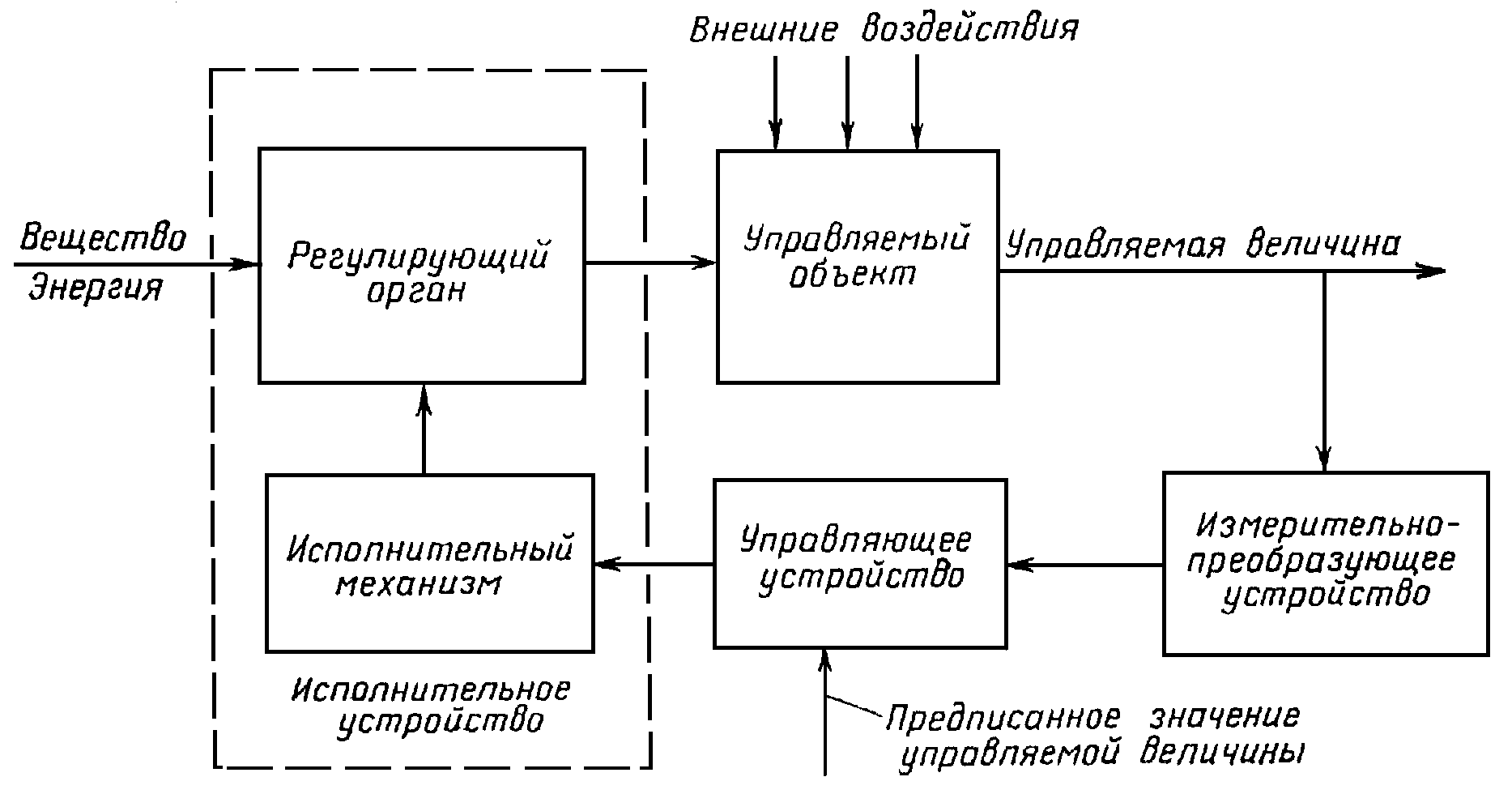
Рис. 6.1. Структурная схема системы регулирования
Основными функциональными блоками ИУ являются исполнительные механизмы (ИМ) и регулирующие органы (РО). По виду потребляемой энергии исполнительные механизмы делятся на электрические гидравлические и пневматические. Для указанных видов исполнительных механизмов имеются наборы вспомогательных устройств усилителей мощности и пускорегулирующей аппаратуры. Электрические исполнительные механизмы получили наибольшее распространение, поскольку для них не требуется промежуточных преобразователей энергии – компрессоров и насосов. Они позволяют получить довольно большие перестановочные усилия при ограниченном быстродействии и высокой точности позиционирования.
Пневматические исполнительные механизмы просты, надежны и удобны в эксплуатации, пожаробезопасны. Поэтому они широко применяются в пожаро- и взрывоопасных производствах (окрасочные и промывочные отделения, производство легковоспламеняющихся веществ). Пневматические механизмы имеют высокое быстродействие и точность позиционирования при умеренных перестановочных усилиях.
Гидравлические ИМ применяются в тех случаях, когда необходимо обеспечить большие перестановочные усилия при высоком быстродействии и точности позиционирования. Гидравлические ИМ сложны в изготовлении и требуют специальных источников рабочей жидкости – масляных насосов высокого давления.
В особую группу выделяются комплектные исполнительные устройства. Они представляют целостную конструкцию из исполнительного механизма и регулирующего органа. В состав этих изделий входят электрогидроклапаны и электропневмоклапаны, предназначенные для коммутации небольших расходов жидких и газообразных веществ. По функциональному назначению ИУ этой группы делятся на регулирующие и запорнорегулирующие.
6.1. Электрические исполнительные механизмы
Электрические исполнительные механизмы в зависимости от типа исполнительного элемента делятся на электромагнитные и электродвигательные. В качестве исполнительных элементов используются электромагниты и электродвигатели, приводящие в движение исполнительные органы механизма, совершающие линейные и угловые перемещения.
Исполнительные элементы таких механизмов подключают к источнику питания с помощью реле, контакторов или кнопочных станций. Исполнительный орган механизма (шток, выходной вал) непосредственно или через кинематическую передачу соединяется с регулирующим органом (вентилями, кранами, задвижками, клапанами, заслонками и т. п.) или рабочими механизмами подачи, дозаторов и т. п.
Скорость перемещения регулирующего органа зависит от частоты вращения исполнительного двигателя, передаточного числа редуктора, а также от кинематики связи между исполнительным механизмом и регулирующим органом. Так как перемещения в различной регулирующей или запорной трубопроводной арматуре ограничены, то в исполнительных механизмах предусмотрены концевые выключатели, отключающие исполнительный двигатель от источника питания при подходе регулирующего органа к крайним положениям. Концевые выключатели представляют собой контактную группу, размыкание и замыкание контактов которых осуществляется при помощи профильных кулачков или рычага, соединенных с выходным валом исполнительного двигателя. Перемещением кулачков относительно контактных групп регулируется величина допустимого угла поворота выходного вала исполнительного механизма. Для получения сигнала, пропорционального положению регулирующего органа, электрические исполнительные механизмы снабжаются датчиками положения (резисторным или индуктивным). По виду движения исполнительного органа электромагнитные исполнительные механизмы подразделяют на ходовые электромагниты с прямолинейным движением и электромагнитные муфты с вращательным движением. Электродвигательные исполнительные механизмы подразделяют на однооборотные (МЭО), многооборотные (МЭМ) и прямоходные (МЭП). Исполнительные механизмы МЭО сочленяются с арматурой, у которой затвор имеет вращательное или поступательное перемещение; МЭМ сочленяются с трубопроводной арматурой с винтовым шпинделем, регулирующими органами, имеющими большие площади проходного сечения затвора; МЭП сочленяются с арматурой в сочетании с регулирующими органами, имеющими малую и среднюю площади проходного сечения затвора [20].
Электродвигательные исполнительные механизмы подразделяют на механизмы с постоянной и переменной скоростями перемещения исполнительного органа. Исполнительные механизмы с постоянной скоростью используются в сочетании с двухпозиционными и трехпозиционными регуляторами, а также с пропорциональными (П) и пропорционально-интегральными (ПИ) регуляторами. Исполнительные механизмы с переменной скоростью используют в основном в сочетании с интегральными (И), (П), (ПИ) и пропорционально-интегрально-дифференциаль-ными (ПИД) регуляторами.
По способу управления исполнительные механизмы делятся на контактные с релейно-контакторными блоками управления (РБ) и бесконтактные с регулирующими устройствами непрерывного действия на основе магнитных усилителей (БРУ).