

4.3. Испытательное оборудование
Для проведения испытаний на воздействие вибраций применяются вибрационные установки (вибростенды). По принципу возбуждения возмущающей силы все вибрационные установки делятся на механические, электродинамические, электромагнитные и гидравлические. Наибольшее распространение в настоящее время получили электродинамические вибрационные стенды, использующие электродинамический принцип создания возбуждающей силы. Такие вибрационные установки обладают широким диапазоном рабочих частот вибрации, линейностью преобразований сигнала, простотой управления, устойчивостью и надежностью в работе, имеют элементы автоматики. Структурная схема вибрационной электродинамической установки приведена на рис. 4.6.
Применение автомата поддержания амплитуды вибросмещений или виброускорения (с автоматическим плавным прохождением частотного диапазона) дает возможность автоматизировать процесс испытаний.

Рис. 4.5.
1 - генератор шума; 2 - полосовой фильтр; 3 - усилитель с автоматическим регулированием уровня; 4 - усилитель мощности; 5 - вибратор; б - испытуемое изделие; 7 - виброизмерительный преобразователь; 8 - виброизмерительная аппаратура
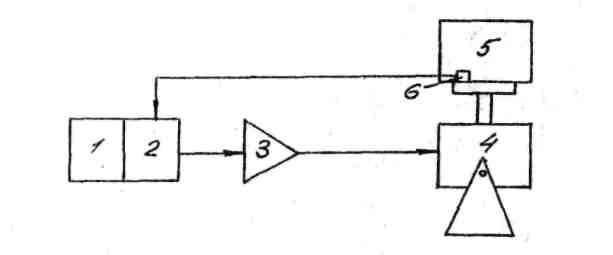
Рис. 4.6.
I - задающий генератор; 2 - автоматический регулятор амплитуды; 3 - усилитель мощности; 4 - вибратор; 5 - испытуемое изделие; 6 - виброизмерительный преобразователь.
Таблица 4.3
Основные технические характеристики отечественных электродинамических установок
Тип виброустановки |
Вытал-кивающая сила |
Максима-льная нагрузка |
Максима-льное перемеще-ние |
Масса подвижной системы |
Частота резонанса |
Коэффици-ент гармоник |
Ток подмагни-чивания |
|
Н |
кг |
мм |
кг |
Гц |
% |
А |
ВЭДС - 10 |
100 |
1.9 |
б |
0,6 |
4000 |
3 |
0.5 |
ВЭДС - 100Б |
1000 |
22 |
7.5 |
2.4 |
3400 |
8 |
1.6 |
ВЭДС- 200А |
2000 |
45 |
12.5 |
5 |
- |
8 |
2.0 |
ВЭДС- 400А |
4000 |
90 |
12,5 |
9.2 |
- |
8 |
3.5 |
ВЭДС- 800А |
8000 |
150 |
12.5 |
16 |
|
8 |
4,4 |
ВЭДС - 1500 |
15000 |
300 |
б |
30 |
1850 |
10 |
6.7 |
В зависимости от принятого метода проведения испытаний выбирается аппаратура управления виброиспытаниями, которую можно разделить на аппаратуру управления синусоидальной вибрацией, широкополосной случайной вибрацией, узкополосной случайной вибрацией.
Типовая конструкция вибратора показана на рис.4.7.
Катушка подмагничивания 8, по которой протекает постоянный ток, создает в магнитопроводе 5 постоянный магнитный поток, пересекающий воздушный зазор магнитопровода. В этот зазор помещена цилиндрическая подвижная катушка 7, через которую пропускается переменный ток разной частоты. Подвижная катушка жестко соединяется с рабочим столом вибратора I и удерживается в нужном положении с помощью упругих подвесок 2. В результате взаимодействия постоянного магнитного потока с переменным магнитным полем возникает сила, перемещающая подвижную катушку и жестко соединенный с ней рабочий стол. Направление ее перемещения изменяется в соответствии с изменением направления потока.
Амплитудное значение возбуждающей силы F , Н определяется по формуле
![]() (4.12)
(4.12)
где
В - магнитная индукция, Тл
;
![]() - длина провода подвижной катушки,
см; I
- эффективное значение силы тока звуковой
частоты в катушке, А .
- длина провода подвижной катушки,
см; I
- эффективное значение силы тока звуковой
частоты в катушке, А .
Подвижная катушка с рабочим столом и гибкие подвески образуют подвижную систему вибратора. Для удобства эксплуатации вибратор установлен на основании, которое обеспечивает его крепление к фундаменту и дает возможность поворачиваться в цапфах на угол 90° от вертикали (горизонтальная вибрация). Магнитный экран обеспечивает защиту испытуемого изделия от действия магнитного поля вибратора. По конструктивным признакам электродинамические вибраторы подразделяются по устройству магнитной системы и подвески подвижной системы, по применяемой системе охлаждения. Различают магнитные системы с одностержневым и двухстержневыым вибраторами, их схемы приведены на рис. 4.8, 4.9.
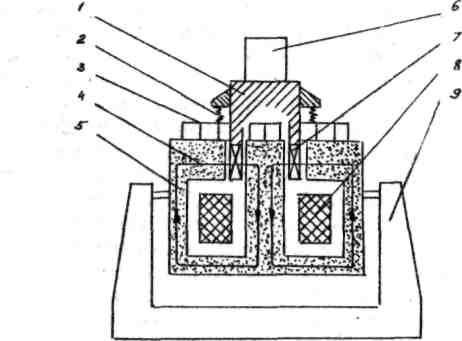
Рис. 4.7
I - стол вибратора; 2 - упругие подвески стола; 3 - магнитный экран; 4 - путь магнитного потока; 5 - магнитопровод; 6 - испытуемое изделие; 7 - подвижная катушка; 8 - катушка подмагничивания; 9 - основание
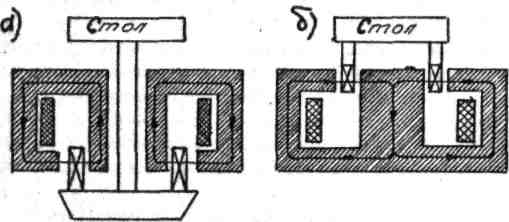
Рис. 4.8
а - рабочий стол и подвижная катушка расположены в противоположных концах магнитной цепи; б - рабочий стол соединен непосредственно с подвижной катушкой
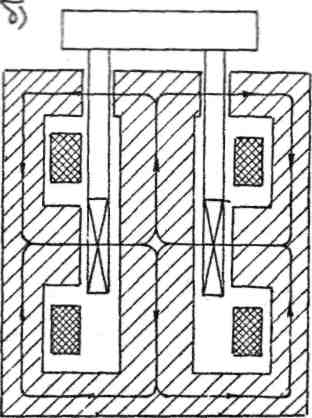

Рис. 9
а - сдвоенный одностержневой; б – двустержневой.
Достоинствами одностержневого вибратора являются: простота конструкции, малые потери, удобство крепления и центровки подвижной системы. К недостаткам этой системы можно отнести большие поля рассеивания в плоскости рабочего стола, что требует применения специальных экранов защиты испытываемых изделий; пониженную жесткость конструкции подвижной системы из-за большой ее длины.
Более совершенна магнитная система двухстержневого вибратора. В такой системе обмотки выполнены так, что их магнитодвижущие силы равны между собой и направлены навстречу друг другу, при этом магнитные потоки этих обмоток в воздушном зазоре складываются и оказывают совместное действие на подвижную обмотку. Потери мощности в двухстержневом вибраторе почти вдвое меньше, чем в одностержневом. Конструкция двустержневого вибратора позволяет получать большие возмущающие силы и создавать колебания с высокими ускорениями. При использовании этой конструкции необходимо экранировать испытуемые изделия от полей рассеивания магнитного потока.
В зависимости от мощности вибратора применяются воздушные и комбинированные системы охлаждения (подвижная катушка охлаждается потоком воздуха, а катушка подмагничивания и кольцевой зазор магнитопровода - проточным маслом).
Основными техническими и эксплуатационными характеристиками вибратора являются: рабочий диапазон частот; максимальная выталкивающая сила; вибрационное смещение; максимальное вибрационное ускорение; максимальная полезная статистическая нагрузка; масса подвижной системы в целом; амплитудно-частотная характеристика и ее неравномерность; поперечные составляющие вибрации; коэффициент нелинейных искажений; напряженность магнитного поля.
Крепятся испытываемые изделия на столе вибростенда с помощью специальных приспособлений, которые являются промежуточный звеном между изделием и столом вибростенда. Конструкция приспособлений во многих случаях определяет точность воспроизведения значений воздействующих факторов вибрации, поэтому необходимо обращать особое внимание на правильный выбор конструкции приспособлений. Необходимо проектировать приспособления с учетом массы, размеров, числа одновременно испытываемых изделий. Изготавливать приспособления рекомендуется из алюминиевых сплавов в виде сплошных кубов или пластин, прикрепляемых к столу вибратора в одной или четырех точках.
Для уменьшения числа местных резонансов соединения испытываемых блоков, крепежного приспособления и платформы вибростенда должны быть выполнены так, чтобы отсутствовали зазоры во всех соприкасающихся плоскостях и число таких плоскостей, было минимальным. Следовательно, нужно крепить блок к платформе вибростенда с наибольшей жесткостью и применять небольшое число крепежных деталей.
При гармонических колебаниях ускорение всегда направлено противоположно перемещению, поэтому при наличии зазора и при движении платформы вниз с ускорением блок будет перемещаться относительно стола вверх на величину зазора и наоборот. Таким образом, блок совершает передвижение вместе с платформой и дополнительно колебания из-за наличия зазора. Эти дополнительные вибрации могут оказывать большое воздействие на блок чем задаваемые ускорения. Величина допустимого зазора в зависимости от задаваемого ускорения и частот составляет
![]() (4.13)
(4.13)
Наиболее простое крепление блока к платформе вибростенда осуществляется с помощью пазовых блоков. Основные требования к приспособлениям: изделие должно крепиться в приспособлении тем же способом, что при эксплуатации с минимальными зазорами; собственная частота приспособления fоп должна быть в 1,5-2 раза выше верхнего значения частоты вибрации изделия; центр тяжести изделия должен лежать на оси виброштока.
Наиболее предпочтительна конструкция приспособления в виде куба, который позволяет крепить испытываемые изделия сразу по трем плоскостям. Длину ребра куба определяют исходя из размеров и числа испытываемых изделий, размещенных на одной грани. Резонансную частоту куба fоп, Гц определяют по формуле
![]() ,
(4.14)
,
(4.14)
где а - длина ребра куба, м.
Если масса приспособления в виде куба получается чрезмерно большой, то применяют приспособление в виде квадратной пластины, длину стороны которой определяют исходя из (4.14) а толщину ее, если она крепится в одной точке, находят по формуле
![]() .
(4.15)
.
(4.15)
Толщину пластины, закрепленной в четырех точках, находят по формуле
![]() .
(4.16)
.
(4.16)
При размещении изделий на приспособлении предусматривается место для установки измерительного датчика (контрольная точка). Контрольную точку выбирают на приспособлении по возможности ближе к точке крепления его к платформе вибратора. После изготовления приспособление аттестовывается на правильность передачи воздействия. Для этого снимается частотная характеристика приспособления. При плавном изменении частоты по датчику, установленному в контрольной точке, поддерживают постоянное ускорение, а по датчику, установленному в точке приспособления, наиболее удаленной от контрольной, производят измерение ускорения.
Метод и схема измерения параметров вибрации зависят от типа применяемого вибропреобразователя. В современной технике измерения параметров вибрации применяются следующие типы вибропреобразователей: индуктивные, трансформаторные, электродинамические, электромагнитные, емкостные, омические, пьезоэлектрические. Рассмотрим их характерные особенности.
Индуктивные и трансформаторные вибропреобразователи малочувствительны к изменению внешних условий, нуждаются в подводе электрической энергии извне, имеют малый участок линейности амплитудно-частотной характеристики, ограничены в частотном диапазоне сверху. Применяются для измерения постоянной составляющей ускорения.
Электродинамические и электромагнитные вибропреобразователи, обладая значительной чувствительностью и простой конструкцией, ограничены в частотном диапазоне снизу, имеет больную массу и габаритные размеры. Диапазон рабочих температур -50-350°С. Для получения вибросмещения сигнал нужно интегрировать, а для получения ускорения - дифференцировать.
Ёмкостные вибропреобразователи обладает низким порогом чувствительности, восприимчивы к внешним условиям, требуют применения сложной аппаратуры.
Омические вибропреобразователи с изменяющимся сопротивлением просты по конструкции, но их относительная чувствительность к неизмеряемым параметрам вибрация велика. Они применяются на низких частотах до 10 Гц, используются в акселерометрах и вибрографах.
Пьезоэлектрические преобразователи наиболее применимы на практике< они имеют малые габаритные размеры и массу, работают в диапазоне частот от долей герц до десятков килогерц, диапазон ускорений 0,01 - 40000 м/с. Структурная схема, характерная для виброизмерительных приборов о пьезоэлектрическими преобразователями, приведена на рис. 4.10.
Сигнал о виброизмерителя поступает на согласующий усилитель, предназначенный для согласования выходного сопротивления вибропреобразователя, затем на измерительный усилитель для усиления сигнала до величины, необходимой для нормальной работы детектора. После этого сигнал детектируется и измеряется магнитоэлектрическим прибором, шкала которого проградуирована в абсолютных и относительных единицах. При определении требований к измерительному каналу его рассматривают как единую физическую систему, преобразующую входной сигнал вибрации. Требуется, чтобы форма вибрации при измерении не искажалась. Для этого необходимо, чтобы частотная характеристика K(f) (К - коэффициент преобразования) канала измерения была равномерной во всем диапазоне частот. Для расширения частотной характеристики в области низких частот необходимо уменьшать собственную емкость вибропреобразователя и увеличивать входное сопротивление согласующего усилителя.
Основные параметры вибропреобразователей: рабочий диапазон частот; чувствительность или действительный коэффициент преобразования; поперечные чувствительность и относительный коэффициент преобразования; рабочий диапазон температур и температурная стабильность; чувствительность к помехам (электрическим и магнитным полям, механическим информациям); собственная емкость; масса и габаритные размеры. Нижняя граница частотного диапазона определяется величиной емкости вибропреобразователя и соединительного кабеля, Верхняя граница определяется значением установочного резонанса механической системы измерительного преобразователя, т.е. f где амплитудно-частотная характеристика имеет подъем. Обычно верхний предел рабочей частоты вибропреобразователя выбирается равным 1/3 его резонансной частоты. Для точных измерений с частотной погрешностью вибропреобразователя не менее 5% верхнюю рабочую частоту выбирают равной 1/5 резонансной частоты. Чувствительность или коэффициент преобразования вибропреобразователя по напряжению ( Ки ) или по заряду (Кq ) является одной из основных характеристик, необходимых для расшифровки параметров вибрации при измерениях, определяется как отношение напряжения или заряда, возникающего на обкладках пьезоэлемента, к воздействующему на него колебательному ускорению
![]() .
(4.17)
.
(4.17)
![]() ,
(4.18)
,
(4.18)
где u - выходное напряжение вибропреобразователя при разомкнутой цепи, мВ; a - действующее значение ускорения, м/с; q- электрический заряд.
![]() ,
(4.19)
,
(4.19)
где Сn - емкость вибропреобразователя, пФ; Ск - емкость кабеля, пФ.
Пьезоэлектрический вибропреобразователь воспринимает колебания не только в направлении оси чувствительности (продольное) (Uао), но и в поперечном направлении перпендикулярно оси чувствительности (Uаη). Это свойство связано с технологическими погрешностями, оценивается коэффициентом поперечного преобразования Кn.
Коэффициент поперечного преобразования Кn вибропреобразователя определяется отношением амплитуды выходного сигнала преобразователя, когда на него воздействует синусоидальное ускорение, направленное перпендикулярно оси чувствительности к амплитуде выходного сигнала вибропреобразователя при воздействии на него синусоидального ускорения той же амплитуды и частоты, направленного по оси чувствительности.
Погрешность
![]() при измерении вибропреобразователем
составляющей
а0
- вызываемая наличием поперечной
чувствительности
Кn
определяется формулой:
при измерении вибропреобразователем
составляющей
а0
- вызываемая наличием поперечной
чувствительности
Кn
определяется формулой:
![]() (4.20)
(4.20)
В диапазоне рабочих температур чувствительность и емкость пьезоэлемента будут несколько меняться c изменением температуры (рис. 4.11, табл. 4.4).
![]()
Рис. 4.10
1 - пьезоэлектрический преобразователь; 2 - согласующий усилитель; 3 - измерительный усилитель; 4 - детектор; 5 - стрелочный прибор.

Таблица 4.4