

Интерполирование функций (многочленами Лагранжа; интерполяционная формула Ньютона; интерполяция кубическими сплайнами).
Интерполя́ция, интерполи́рование — в вычислительной математике способ нахождения промежуточных значений величины по имеющемуся дискретному набору известных значений.
Многим из тех, кто сталкивается с научными и инженерными расчётами часто приходится оперировать наборами значений, полученных опытным путём или методом случайной выборки. Как правило, на основании этих наборов требуется построить функцию, на которую могли бы с высокой точностью попадать другие получаемые значения. Такая задача называется аппроксимацией. Интерполяцией называют такую разновидность аппроксимации, при которой кривая построенной функции проходит точно через имеющиеся точки данных.
Существует также близкая к интерполяции задача, которая заключается в аппроксимации какой-либо сложной функции другой, более простой функцией. Если некоторая функция слишком сложна для производительных вычислений, можно попытаться вычислить её значение в нескольких точках, а по ним построить, то есть интерполировать, более простую функцию. Разумеется, использование упрощенной функции не позволяет получить такие же точные результаты, какие давала бы первоначальная функция. Но в некоторых классах задач достигнутый выигрыш в простоте и скорости вычислений может перевесить получаемую погрешность в результатах.
Рассмотрим
систему несовпадающих точек ![]() (
(![]() )
из некоторой области
)
из некоторой области ![]() .
Пусть значения функции
.
Пусть значения функции ![]() известны
только в этих точках:
известны
только в этих точках:
![]()
Задача
интерполяции состоит в поиске такой
функции ![]() из
заданного класса функций, что
из
заданного класса функций, что
![]()
Точки называют узлами интерполяции, а их совокупность — интерполяционной сеткой.
Пары
 называют точками
данных или базовыми
точками.
называют точками
данных или базовыми
точками.Разность между «соседними» значениями
 — шагом
интерполяционной сетки.
Он может быть как переменным, так и
постоянным.
— шагом
интерполяционной сетки.
Он может быть как переменным, так и
постоянным.Функцию
 — интерполирующей
функцией или интерполянтом.
— интерполирующей
функцией или интерполянтом.
Аппроксимация функций заключается в приближенной замене заданной функции f(x) некоторой функцией φ(x) так, чтобы отклонение функции φ(x) от f(x) в заданной области было наименьшим. Функция φ(x) при этом называется аппроксимирующей. Типичной задачей аппроксимации функций является задача интерполяции. Необходимость интерполяции функций в основном связана с двумя причинами:
Функция f(x) имеет сложное аналитическое описание, вызывающее определенные трудности при его использовании (например, f(x) является спецфункцией: гамма-функцией, эллиптической функцией и др.).
Аналитическое описание функции f(x) неизвестно, т. е. f(x) задана таблично. При этом необходимо иметь аналитическое описание, приближенно представляющее f(x) (например, для вычисления значений f(x) в произвольных точках, определения интегралов и производных от f(x) и т. п.)
Постановка задачи интерполяции
Простейшая задача интерполяции заключается в следующем. На отрезке [a, b] заданы п + 1 точки xi = x0, x1, . . ., xn, которые называются узлами интерполяции, и значения некоторой функции f(x) в этих точках
f(xo) = y0, f(x1) = y1, . . ., f(xn) = yn· (1)
Требуется построить функцию Φ(χ) (интерполяционная функция), принадлежащую известному классу и принимающую в узлах интерполяции те же значения, что и f(x), т. е. такую, что
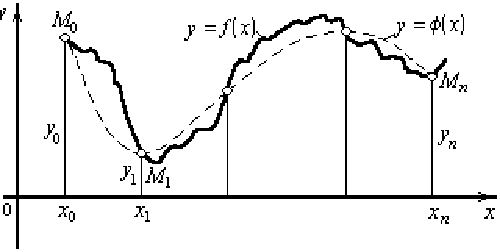
Рисунок 1. Геометрическая интерпретация
Ф(x0) = y0, Ф(x1) = y1, . . ., Ф(xn) = yn· (2)
Геометрически это означает, что нужно найти кривую у = Φ(x) некоторого определенного типа, проходящую через заданную систему точек M(xi, yi) (i = 0, 1, ..., п) (Рисунок 1).
В такой общей постановке задача может иметь бесконечное множество решений или совсем не иметь решений.
Однако эта задача становится однозначной, если вместо произвольной функции Φ(x) искать полином1 φ(x) (интерполяционный полином) степени не выше п, удовлетворяющий условиям (2), т. е. такой, что
φ (xo) = y0, φ (x1) = y1, . . ., φ (xn) = yn· (3)
Полученную интерполяционную формулу
φ( x) = anxn + an-1 xn-1 +... + a1 x + a0 (4)
обычно используют для приближенного вычисления значений данной функции f(x) для значений аргумента x, отличных от узлов интерполяции. Такая операция называется интерполяцией функций.
Различают два вида интерполяции:
глобальная - соединение всех точек f(χ) единым интерполяционным полиномом;
локальная - соединение точек отрезками прямой (по двум точкам), отрезками параболы (по трем точкам).
1 Полиномом (многочленом) или целой рациональной функцией от x, называется функция вида (4), где a0, a1, an - постоянные числа, называемые коэффициентами; п - целое неотрицательное число, называемое степенью полинома.
Интерполяцио́нный
многочле́н Лагра́нжа — многочлен минимальной
степени, принимающий данные значения
в данном наборе точек. Для ![]() пар
чисел
пар
чисел ![]() ,
где все
,
где все ![]() различны,
существует единственный многочлен
различны,
существует единственный многочлен ![]() степени
не более
степени
не более ![]() ,
для которого
,
для которого ![]() .
.
В
простейшем случае (![]() )
— это линейный многочлен, график которого
— прямая, проходящая через две заданные
точки.
)
— это линейный многочлен, график которого
— прямая, проходящая через две заданные
точки.
Лагранж предложил способ вычисления таких многочленов:
![]()
где базисные полиномы определяются по формуле:

![]() обладают
следующими свойствами:
обладают
следующими свойствами:
являются многочленами степени

 при
при 
Отсюда
следует, что
,
как линейная
комбинация
,
может иметь степень не больше
,
и ![]()
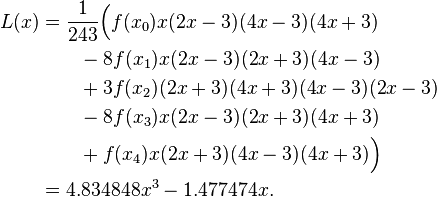
Пример 1
Найдем формулу интерполяции для ƒ(x) = tan(x) имеющей следующие значения:

![]()
![]()
![]()
![]()
![]()
Получим
Интерполяционные формулы Ньютона — формулы вычислительной математики, применяющиеся для полиномиального интерполирования.
Если
узлы интерполяции равноотстоящие и
упорядочены по величине, так что ![]() ,
то есть
,
то есть ![]() ,
то интерполяционный
многочлен можно
записать в форме Ньютона.
,
то интерполяционный
многочлен можно
записать в форме Ньютона.
Интерполяционные полиномы в форме Ньютона удобно использовать, если точка интерполирования находится вблизи начала (прямая формула Ньютона) или конца таблицы (обратная формула Ньютона).
Пусть
для функции ![]()
![]() заданы
значения
заданы
значения ![]() для
равноотстоящих значений независимой
переменной:
для
равноотстоящих значений независимой
переменной: ![]() ,
, ![]() ,
где
,
где ![]() - шаг
интерполяции.
Требуется подобрать полином
- шаг
интерполяции.
Требуется подобрать полином ![]() степени
не выше
степени
не выше ![]() ,
принимающий в точках
,
принимающий в точках ![]() значения
значения
![]() ,
. (1)
,
. (1)
Условия
(1) эквивалентны тому, что ![]() при
при ![]() .
.
Интерполяционный полином Ньютона имеет вид:

 . (2)
. (2)
Легко
видеть, что полином (2) полностью
удовлетворяет требованиям поставленной
задачи. Действительно, во-первых, степень
полинома ![]() не
выше
не
выше ![]() ,
во-вторых,
,
во-вторых,
![]() и
и ![]() ,
, ![]() .
.
Заметим,
что при ![]() формула
(2) превращается в ряд Тейлора для
функции
формула
(2) превращается в ряд Тейлора для
функции ![]() :
:
 .
.
Для
практического использования
интерполяционную формулу Ньютона (2)
обычно записывают в несколько
преобразованном виде. Для этого введём
новую переменную ![]() по
формуле
по
формуле ![]() ; тогда
получим:
; тогда
получим:
![]() , (3)
, (3)
где
представляет
собой число
шагов,
необходимых для достижения точки ![]() ,
исходя из точки
,
исходя из точки ![]() .
Это и есть окончательный вид интерполяционной
формулы Ньютона.
.
Это и есть окончательный вид интерполяционной
формулы Ньютона.
Формулу
(3) выгодно использовать для интерполирования
функции
в
окрестности начального значения ![]() , где
, где ![]() мало
по абсолютной величине.
мало
по абсолютной величине.
Если
дана неограниченная таблица значений
функции ![]() ,
то число
в
интерполяционной формуле (3) может
быть любым. Практически в этом случае
число
,
то число
в
интерполяционной формуле (3) может
быть любым. Практически в этом случае
число ![]() выбирают
так, чтобы разность
выбирают
так, чтобы разность ![]() была
постоянной с заданной степенью точности.
За начальное значение
была
постоянной с заданной степенью точности.
За начальное значение ![]() можно
принимать любое табличное значение
аргумента
.
можно
принимать любое табличное значение
аргумента
.
Если таблица значений функции конечна, то число ограничено, а именно: не может быть больше числа значений функции , уменьшенного на единицу.
Заметим, что при применении первой интерполяционной формулы Ньютона удобно пользоваться горизонтальной таблицей разностей, так как тогда нужные значения разностей функции находятся в соответствующей горизонтальной строке таблицы.
Интерполирование сплайнами
Интерполяционные
формулы Лагранжа, Ньютона и Стирлинга
и др. при использовании большого числа
узлов интерполяции на всем отрезке
[a, b]
часто приводят к плохому приближению
из-за накопления погрешностей в процессе
вычислений [2]. Кроме того, из-за расходимости
процесса интерполяции увеличение числа
узлов не обязательно приводит к повышению
точности. Для снижения погрешностей
весь отрезок [a, b]
разбивается на частичные отрезки и на
каждом из них функцию![]() заменяют
приближенно полиномом невысокой степени.
Это называется кусочно-полиномиальной
интерполяцией.
заменяют
приближенно полиномом невысокой степени.
Это называется кусочно-полиномиальной
интерполяцией.
Один из способов интерполирования на всем отрезке [a, b] является интерполирование сплайнами.
Сплайном называется кусочно-полиномиальная функция, определенная наотрезке [a, b] и имеющая на этом отрезке некоторое количество непрерывных производных. Преимущества интерполяции сплайнами по сравнению с обычными методами интерполяции – в сходимости и устойчивости вычислительного процесса.
Рассмотрим один из наиболее распространенных в практике случаев – интерполирование функции кубическим сплайном. Пусть на отрезке [a, b] задана непрерывная функция . Введем разбиение отрезка:
![]() (6)
(6)
и
обозначим ![]() ,
, ![]() .
.
Сплайном,
соответствующим данной функции
и
узлам интерполяции (6) называется
функция ![]() ,
удовлетворяющая следующим условиям:
,
удовлетворяющая следующим условиям:
1)
на каждом отрезке ![]() ,
,![]() функция
является
кубическим многочленом;
функция
является
кубическим многочленом;
2) функция , а также ее первая и вторая производные непрерывны на отрезке [a, b] ;
3) ![]()
Третье условие называется условием интерполирования. Сплайн, определяемый условиями 1) – 3), называется интерполяционным кубическим сплайном.
Рассмотрим способ построения кубического сплайна [2].
На
каждом из отрезков
,
будем
искать сплайн-функцию ![]() в
виде полинома третьей степени:
в
виде полинома третьей степени:
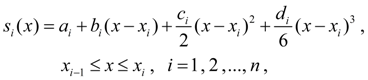 (7)
(7)
где ![]() искомые
коэффициенты.
искомые
коэффициенты.
Продифференцируем (7) трижды по х :
откуда следует
![]()
Из условия интерполирования 3) получаем:
![]() . (8)
. (8)
Кроме
того, будем считать ![]() .
.
Из условий непрерывности функции вытекает:
![]()
Отсюда с учетом (7) получим:

Обозначив![]() и
опуская промежуточные выкладки [2],
окончательно получим систему уравнений
для определения коэффициентов
и
опуская промежуточные выкладки [2],
окончательно получим систему уравнений
для определения коэффициентов![]() :
:
 (9)
(9)
В силу трех диагональности матрицы коэффициентов система (9) имеет единственное решение [2]. Найдя коэффициенты , остальные коэффициенты определим по явным формулам:
 (10)
(10)
Таким образом, существует и найден единственный кубический сплайн, удовлетворяющий условиям 1) – 3) .