

Программное обеспечение асутп. Программное обеспечение современной асутп должно состоять из следующих компонент:
1. Операционная система реального времени для ПЛК ( программного логического контроля ).
2. Система программирования и отладки прикладных программ для ПЛК.
3. Комплекты прикладных программ для ПЛК, реализующих функции для конкретной АСУТП.
4. Операционные системы для промышленного компьютера.
5. Системы для конфигурирования и выполнения на промышленном компьютере функций человеко-машинного интерфейса, сбора, обработки данных и супервизорного управления конкретным технологическим объектом. Эти системы программирования называются системами SCADA.
Наличие современной системы программирования является одним из самых главных факторов при выборе базиса построения АСУТП.
Система программирования должна позволять:
1. Написание программ на технологических языках высокого уровня. Для непрерывных процессов – это язык функциональных блоков, а для последовательных алгоритмов – это язык лестничных схем.
2. Система программирования должна выполняться под Windows, иметь режим отладки, позволяющий производить выполнение программы по ее исходному тексту.
3. Система должна позволять записывать в память контроллера через каналы связи все изменения в программе без ее остановки.
Статические характеристики регуляторов.
Статические регуляторы работают при обязательном отклонении регулируемой величины от требуемого значения. Это отклонение тем больше, чем больше возмущение. Это заложено в принципе действия регулятора и не является его погрешностью, поэтому данное отклонение называется статической ошибкой регулятора. Чем больше коэффициент передачи регулятора Kр, тем на большую величину откроется заслонка при одних и тех же значениях e, обеспечив в установившемся режиме большую величину потока Q. Это значит, что на статической характеристике одинаковым значениям e при больших Kр будут соответствовать большие значения возмущения. Поэтому, чтобы уменьшить статическую ошибку надо увеличивать коэффициент передачи регулятора. Того же результата можно добиться, увеличивая коэффициент передачи объекта управления, но это дело конструкторов, проектирующих данный объект, а не специалистов по автоматике.
Статика характеризует насколько сильно значение регулируемой величины отклоняется от требуемого значения при действии возмущений, и равна тангенсу угла наклона статической характеристики, построенной в относительных единицах
Статические регуляторы обладают статической ошибкой;
Внешние электрические и трубные проводки. Назначение и классификация. Порядок выбора кабелей и проводов.
На предприятиях пищевой промышленности щиты м пульты могут размещаться как в производственных помещениях, так и в специальных щитовых помещениях. Для внешних устройств применяются щиты специальной конструкции, например обогревные. Щиты местных пунктов управления располагаются таким образом, что бы управление могло производиться не только по показаниям приборов, но и по средствам визуального наблюдения за объектом. Щиты операторных пунктов располагаются таким образом, что бы с места установки можно было обозревать все оборудование, относящееся к данному пункту управления. Щиты диспетчерских пунктов управления располагаются в главном корпусе предприятия. При установки щитов в производственные помещения необходимо выполнить следующие требования: 1. Минимальная протяженность линии связи, между ПП и щитом. 2. Удобство обслуживания щита оператором, свободный подход к нему. 3. Хорошая освещаемость шкал приборов. 5. Обеспечение пожаро-взрыво-безопасности щита(негорючая проводка). При установки щита в производственном помещении: Т не должна превышать 20С, ф не должна превышать 60%. В любом случае пространственное расположение элементов управления должно обеспечить оператору решения задач по управлению в любом режиме. Максимальное расстояние от оператора до щита не должно превышать 5м. оно опр. Размерами шкал приборов, наличием мнемосхемы и т.д. на пункте управления должны быть обеспечены характеристики среды обеспечивающей работоспособность оператора в течение длительного времени. Комфортные условия труда 19-21, 80%. Освещение должно быть естественным но и допускается освещение люминесцентными лампами. Внешние электрические и трубные проводки. Внешняя электрическая и трубная проводки это внещитовая связь с отдельно стоящими устройствами автоматизации и устройствами питания. При проектировании внешних проводок изучают ФСА, ПЭС и схемы питания. При проектировании внешних проводок выбирают: способ выполнения проводки; техн характеристики кабеля или проводка. В зависимости от места прокладки проводки делятся на: наружные, прокладываются снаружи здания; и внутренние прокладываются внутри закрытых помещений. По способу выполнения различают проводки выполненные в защищенных трубах, на лотках мостах и в коробках. Проводки также делятся на открытые прокладываются по конструктивным элементам здания; и скрытые. Кабели прокладывают аналогично, но дополнительно могут прокладываться в траншее. На пищевых пред как правило применяется открытый способ выполнения проводки. Более надежным является прокладка в металлических трубах нежели прокладками кабелей, потому что в случае аварии возникающей на проводниках в одной трубе эта авария не переходит на соседний. Однако это приводит к значительному удорожанию монтажных работ.
Билет №19
Стационарные режимы нелинейных систем при случайных воздействиях. Статистическая линеаризация
В реальных сис-х испол. нелин. регул-ры (реле температуры, давления), что позволяет трактовать эти сис. как нелин. В процессе эксплуатации на эти сис. Действуют возмущения, поступающие по различным каналам.
Идея и суть метода статич. линеаризации.

Суть состоит в след.: исходное нелинейное звено (нз) заменяют условно линейным эквивалентным исходному нелин. по балансу каких-либо пар-ов. Чаще всего таковым явл. мат. ожидание на выходе неолин. звена и вел-на дисперсии.
f(t)=mf+f*(t), где mf – мат. ожидание, f*(t) – центрированная случ. вел-на.
Заменям исходное нелин звено.

Km=k0, KD=k01-к-ты статич. линеаризации
Системы управления на базе локальных технических средств автоматизации. Измерения, контроль предельных значений и регистрация параметров в локальных системах
На нижней ступени располагают локальные системы автоматического управления и взаимосвязанные типовые ТП, соответствующие простейшим технологическим операциям и типовому оборудованию. Технические решения по автоматизации таких ТП обычно являются типовыми. Задачи таких систем автоматического упрощения — обеспечение эффективности управления и надежности работы технологического оборудования.
В состав технических средств локальных систем автоматики входят:
Автоматические устройства с априорной или текущей информацией о возмущении, действующие по разомкнутой цепи преобразования сигнала в управляющее воздействие на ОУ;
Автоматические регуляторы, обеспечивающие стабилизацию заданного значения регулируемой величины путем выработки управляющего воздействия, соответствующего отклонению этой величины от заданного значения;
Средства автоматического контроля, которые выполняют функции измерения и регистрации контролируемых параметров процесса, а также сигнализации о достижении этими параметрами установленных предельных значений;
Системы оптимизации, автоматически определяющие и поддерживающие оптимальный режим протекания ТП.
Для получения данных о ходе производственного процесса и его дальнейшей автоматизации используются датчики первичной информации и элементы систем автоматизации, использующие и преобразующие полученную с датчиков хода производственного процесса информацию в целях последующей работы различного рода сервоприводов, приводящих в действие исполнительные механизмы систем автоматизации (датчики, усилители, преобразователи, стабилизаторы…).
Контроль предельных значений и регистрация параметров осуществляется при помощи контроллеров. Контроллер представляет собой функционально законченное изделие с внутренней программой, настройка которой на конкретный объект управления производится с лицевой панели прибора или по сети с персональной ЭВМ.
Задача построения локальных систем управления ТП — первоэтапная в решении проблемы автоматизации управления производством в целом.
К местным локальным ТСА относится контроллер ТРМ200 -осуществляет все задачи измерений, обработку, фильтрацию. В данном случае отображение инф-ции идет на цифровое табло.
В локальных сис-ах измерения регистрация параметров не осуществляется, а передается по интерфейсу RS на др. уровень, где имеются программы обработки и принтер.
Схема внесения поправки на температуру «холодного» спая термопары.
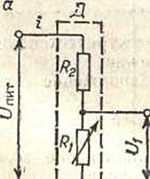
В промышленных условиях стабилизация температуры холодных спаев термопары затруднительна и обычно используют второй способ — автоматическое введение поправки на температуру холодных спаев . Для этого применяют: неуравновешенный мост, включаемый последовательно с термопарой .
В одно плечо такого моста включен медный резистор, расположенный около холодных спаев . При изменении температуры холодных спаев термопары изменяется сопротивление резистора и выходное напряжение неуравновешенного моста. Мост подбирают таким образом, чтобы изменение напряжения было равно по величине и противоположно по знаку изменению э. д. с. термопары вследствие колебаний температуры холодных спаев .
4. Краткая характеристика кабелей и проводов, применяемых в системах автоматизации. Конструкции кабелей.
Задача состоит в выборе марки провода или кабеля, изоляции, числа жил, и площади токоведущих жил. При этом определяется допустимые токовые нагрузки и изучаются условия прокладки. В системах автоматизации применяются провода и кабели с алюминиевыми и медными токоведущими жилами. При этом min площадь сечения алюм жил 2,5мм. Изоляция кабелей и проводов опр условиями их прокладки. ПВХ изоляции, резиновая изоляция кабелей и проводов применяется для прокладки в сухих сырых и пыльных помещениях. При темп -30+60. В качестве защитных устройств применяется металлический и пластмассовые трубы. При открытой проводке на предприятии пищ пром на расстоянии 2м от пола применяются бронированные кабели. Выше можно применять не бронированные. Площадь сечения токовед жил опр исходя из токовой нагрузки и мех прочности. При этом на предприятии пищ пром запрещается применять фидоры (пит кабель) не менее 1,5мм. При это должно выполняться условие: Iдлит доп>Iрасч. Краткая характеристика кабелей и проводов применяемых в сист автоматизации. В сист автомат пищ произв применяются установочные и компенсационные провода, а также силовые контрольные и термоэлектродные кабели. Провода. В СА применяются установочные провода с рабочим напряжением до 660В. Конструктивно установочный провод состоит из: токоведущей жилы и изоляции токовед жилы. Жила может быть медной или алюминиевой. Компенсационные провода применяются для непосредственного соед электродов термопар и контактов потенциометров или милливольтметров. По обозначению: в первой позиции обознач провода указывается материал токовед жилы: А, М (по умолчанию). Во второй: П-провод, К-кабель. В третьей позиции приводится материал изоляции жил: В-ПВХ, Р-резина. В 4 позиции мех св-ва провода: Г-гибкий, по умолчанию провод жесткий. Если провод экранированный ставится буква Э. Здесь же указываются кол-во жил и площадь сечения токовед жил.
Конструктивно кабель состоит из токовед жилы, изоляции, оболочки, защитного покрова. В 1 поз указ материал: А, по умолчанию медный. Во 2 поз назначение кабеля: К - конструктивный (для управления), по умолчанию кабель силовой С (для пит >660В). В 3 поз указ изоляция: В-ПВХ, Р-резина, П-полителен. В 4 поз для защиты изоляции жил кабеля от мех воздействий, влаги, прямых солнечных лучей применяется оболочка кабеля. Представляет собой сплошную трубу накладываемую на кабель. Материал может быть: В – ПВХ, А – алюм, Н – негорючая шланговая резина, С – свинец. Для защиты оболочки кабеля от мех повреждений применяется броня – представляет собой стальные ленты наматываемые на оболочку. Если кабель бронированный то в 5 поз ставится буква Б. Если кабель без брони он назыв голым буква Г. Если кабель экранированный марка кабеля окан на букву Э. Экран представляет собой алюмин или медную фальгу устанавлив под оболочку, также может быть выполнен в виде пучков проводов. Указыв кол-во жил и площадь сечения. Кабельные конструкции. Для соединений и разветвлений кабелей применяются соединительные коробки, с установленными внутри сборками клемных зажимов. Лотки и мосты применяются для открытой прокладки кабелей и проводов, при условии отсутствия возможности мех воздействия. Лоток это сварной мост. Его поперечное крепление к тетиве при помощи сварки, а у моста при помощи шарнира. Для прокладки больших потоков проводов применяется коробка. Они также применяются когда прокладка в трубах дорога. Когда требуются пыле влагозащищ исполнение применяются защитные трубы которые могут бытьь стальные или пластмассовые. При этом на предприятии пищ пром запрещаются применять пластмассовые трубы в пажаровзрывоопасных помещениях, аналог для дошкольных и образов учреждений. Диаметр трубы опр диаметром проводника и условиям прокладки. Сборные конструкции применяются для прокладки кабелей, а также в качестве поддерживающей конструкции для лотков и мостов.
Билет №20
Особенности динамики нелинейных систем.
Нелинейные систему – системы которые описываются нелинейными уравнениями (дифферинциальными, алгебраическими)
Если в контуре системы хотя бы одно нелинейное звено, то система нелинейна.
Нелинейность можно устранить введением обратной связи.
Особенности динамики нелинейных систем
В отличие от линейных систем устойчивость нелинейных систем зависит от начальных условий, величин приложенных возмущений. Следовательно, для нелинейных систем вводится понятие – Оцениваемость устойчивости :
- устойчивость в малом
- устойчивость в большом
- устойчивость в целом
Линейная
устойчивость системы
![]()
Нелинейные
системы - устойчивость зависит от
величины приложенных возмущений и от
начальных условий (толкнуть автобус
или ребенка)
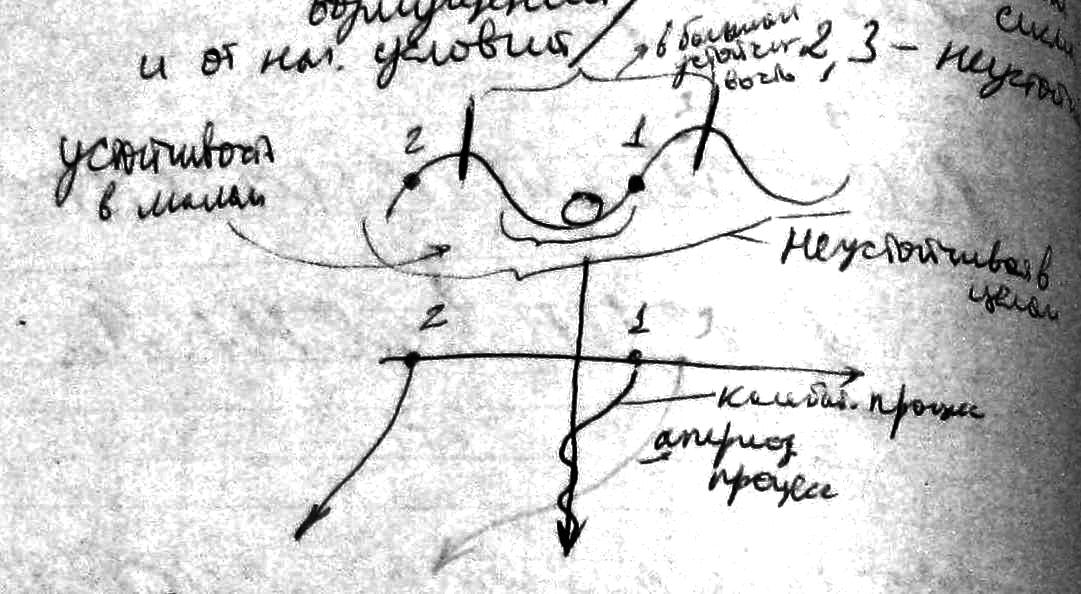
1-устойчивая система; 2,3 – неустойчивая система
Устойчивость в малом – устойчивость системы при бесконечно малых величинах возмущений и отклонений.
Устойчивость в большом - устойчивость системы при номинальных величинах ( режимы номинальны при определении условия вибрации) возмущений и отклонений.
Устойчивость в целом - устойчивость системы при любых величинах возмущений и отклонений
Аналогично вид и качество переходных процессов в нелинейных системах так же зависят от величин приложенных возмущений и отклонений.
Системы управления на базе локальных технических средств автоматизации. Программно-логическое управление, сигнализация, блокировка, защита в локальных системах
К таким системам управления относится третий класс систем, то есть САР (контроллеры локальные – регуляторы, обеспечивающие П-, ПИ- и ПИД-регулирование, к примеру – любой из ТРМ). В организации контура регулирования участвует датчик и исполнительный механизм, возможно и таймер. Связи контроллера осуществляются через модули RS. Стабилизация – уставка постоянная. Связанное регулирование – уставка регулятора идет от другого датчика, например, температура в помещении: уставка зависит от температуры на улице. Программное регулирование –регулирование на основе заложенной в регулятор программы– например – автоклав - плавный набор температуры, выдержка, плавное уменьшение температуры.
Контроль аварийной ситуации в интегрированных системахНедопустимое понижение и повышение параметров в управления(t пастер.молока)Такой контроль может осуществлять:1)Измерение сигнала функционально и передача его в контроллер где Компоратор его обрабатывает(аналоговый в дискретный). При реализации системы контроля аварийных ситуаций в компьютере контролируемый параметр может изменять функционал в диапазоне 4…20 мА и вводиться в контроллер. Для определения предельного значения сигнал поступает на компоратор- логический модуль, у которого на выходе численное значение параметра, на выходе несколько дискретных сигналов(А1,А2…А10), они имеют значения 0или1. Выходной сигнал меняет значение при переходе измерения параметров через уставу (задание0, находящейся в программе . Пример : если t<76C на выходе уставки А1 становиться =1. Аналогичным образом А2 =1, если t>80C. При построении системы АС измеренные величины проходит через компоратор. В нем при настройки систему ввод. уставки для каждого уровня срабатывания защиты сигнала. На нем м.б. предусмотринны до 10 уровней , на каждом уровне свой сигнал управления. При формировании алгоритма контроля АС м.б. рассмотрено следующие алгоритмы действия(пределы сробатывания):
-отклонение от нормы на величину уставки вызывает предупредительный сигнализацию(65С)Эта предупредительная сигнализация реальзуется в виде появления мигания на мнемосхеме значка обозначающий данный агрегат(t-у), либо мигание сигнальной лампы табло.
-уровень блокировки , если параметр превысил предупредительный уровень и вышел на следующую уставку, то производиться воздействие на техн. Оборудование с целью снижения режима работы комплекса.Блокирующее воздействие напарметр с целью его возвращения к норме на определенное время с возможностью восстановления нормального ежима работы комплекса при снижении параметра
- 3-я уставка компоратора – авария . В этом случае при переходе через эту уставку , следовательно А3=1. При этом отключается комплекс. Последовательно восстанавл. режима возможно только операторским путем.Другой вид аварийной ситуации – это аварийная ситуация, информация о которой поступает в контроллер,системы управления которых дискретна(1или0). В этом случае на объекте используется не измеритель, еа сигнализатор. Пример: конечный выключатель, кот. контролирует закрытие двери холодильной камеры. Датчик положения.
Контроль аварийной ситуации в интегрированных системах
1.Сигнализация( оповещение) Контроль требует место, где должно появляться предупреждение. Предупреждение аварийной ситуации устанавливается в контроллере и через внешний выходной сигнал(дискретный) поступает на специальный техническое средство – Табло и звуковой сигнал. Они могут быть погашены оператором, е не по времени.
2. Защитная операция Блокировка – информация формируется в контроллере и при появлении такой информации реализуется программа управления объектом, в которой предусмотрено во 1-х отключение каких либо узлов или агрегатов на Тех.Комплексе. К примеру: насос подающий масло смазки на компрессор. По этой же команде включается резервный насос, что приведет к отключению блокировки.В некоторых случаях резервный не предусмотрен, но возможно в течении некоторого времени продолжение работы. В это случае по аварийному сигналу, к примеру, вода в баке накопителя подходит к нижнему уровню. По этой команде может отключаться второстепенный потребитель воды из бака, а остальные продолжать работать. Об этом отключении поступает сообщение на пульт оператора, если дальнейшее уменьшение уровня в баке не происходит, следовательно продолжается работа ТК до тех пор , пока не увеличится уровень в баке, либо уровень продолжается уменьшаться и тогда будет достигнут 3-й аварийный уровень, при котором отключаются все потребители. Если при включенной блокировки уровень восстанавливается, то отключенные потребители включаются автоматически. Для подготовки и настройки задач аварийно-предупредительного контроля в комплексных системах предусматривается специальный модуль SCADA системы проектирования комплексных систем. Таким модулем в SCADA системе GENIE является модуль формирования тревог.
Подключение термометра сопротивления к измерительным схемам.