

Билет №1
Понятие об автоматическом управлении. Классификация САУ.
Классификация:
|
|
Управление процедура внесения управляющих воздействий на ОУ с целью поддержания его в требуемом состоянии или обеспечения требуемого протекания процессов. Управление которое осущ без участия человека назыв автоматическим, в противном случае операторным управлением. Структурная схема СУ в общем виде: О-ПП-СБ-УУ-ИУ. Исходя из общей структуры проведем классификацию СУ: 1.Разомкнутая система: а.система программного управления. УУ выдает управляющее воздействие не получая инф о состоянии системы на основании каких либо признаков, временной программы. (простота и повыш надежность, не высокое качество управления) б.СУ по возмущению. УУ вырабатывает управляющее воздействие на основе инф по вел возмущ воздействию на сист. 2.Замкнутая система: УУ вырабат управляющее воздействие на основе измер инф по состоянию объекта по выбранному параметру. 3.Комбинированная система: УУ выраб управ возд на основе инф о параметрах объекта и на основе инф возмущ воздействия. Классификация САУ: 1. Линейные систе – системы которые опис линейным уравнением. Нелинейные сист – наоборот. 2.По характеристике сигнала: непрерывные и дискретные. 3. По параметрам: стахастические (вероятностный характер параметра), детерминированный (с распределенными параметрами)
Структурно-параметрический анализ технологических процессов и оборудования пищевых производств.
Параметрический анализ объекта выполняется с целью опр всех параметров подлежащих контролю или управлению. При анализе необходимо устанавливать: номенклатуру показателей, численные значения, способы оценки, допустимый диапазон отклонений, стабильность параметров. Структурный анализ объекта проводится для определения внутренних связей между элементами технологического комплекса. Задача управления технологическим процессом может быть сформулирована: установить и поддерживать такие значения управляющих воздействий, при которых показатели качества не выходят из заданного диапазонапри любых возможных для данного производственного производства отклонений неуправ возмущ возд х. Регулирование отклонений предусматривает измерение показателей качества Аz и формирование управляющих воздействий в зависимости от отклонений. Регулирование возмущений используется когда Az невозможно изменить оперативно. Для контроля возмущения и отклонения необходимо знать и контролировать технологические параметры в течении переработки однородной партии сырья. Проводится по плану который опр технолог. По итогам исследования состав статистические таблицы и на основании их можно проводить стат ислед. Конечной целью исследования многофакторного процесса является создание комплексной системы автоматизированного управления. При проведении анализа с целью его автоматизации подготавливается инф:
1.инф обеспечение задач контроля и управления;
2.метрологическое обеспечение;
3.привязка к реальному времени тех процесса;
4.алгоритмическое и мат обеспечение.
Основные методы анализа:
1.анализ стандартов производ технолог документ на сырье, энергоносители;
2. Комплексное экспериментально обследование объекта, обработка результатов с использованием методов регрессионного анализа;
3. Структурно параметрическое моделирование;
4.организация и проведение опроса специалистов.
Многоканальные системы регулирования.
Организация проектирования локальных систем автоматизации и автоматизированных систем управления.
Реконструкция действующих и строительство новых предприятий производится в соотв с проектом. Проект это комплекс тех документации позволяющих воспроизвести в натуре проектируемый объект. Проект пром предприятий может включать в себя: 1.экономическая часть 2.технологическая часть 3.строительный проект 4.энергоснабжение и освещение 5.проект автоматизации. В общем случае проект автоматизации предусматривает: 1.решение задач автоматизации на современном уровне. 2.снижение стоимости сист в том числе и ее монтажа. 3.производства монтажных работ крупноблочным способом. 4.комплектование СА 5.опр затрат на разработку и монтаж СА. 6.опр технико эконом показателей СУ. В процессе работы над проектом автоматизации решается задача выбора рационального ур-ня автоматизации. Уровень автоматизации опр тем экономическим эффектом который может быть получен при внедрении автоматического управления. Эконом эффект опр из следующих соображ при внедрении автом управления уменьшается потери сырья; обеспечение требуемого качества готовой продукции; точное поддержание тех процесса; уменьшение доли ручного труда и как следствие это приводит к уменьшению себестоимости ед готовой продукции и повышение рентабельности ТП. В зависимости от уровня автом проектируется 3 вида систем управления: 1.системы локального управления предусматривает полную механизацию процесса; полный автомат контроль параметров тех проц, а также частичное автоматическое регулирование. 2.сист комплексной автоматизации предусматривает управление всех ТП а также вспомогательными операциями, начиная от начальных стадий и заканчивая завершающими стадиями. Предусматривает дистанционное управление процесса. Роль местных щитов понижена. 3.система АСУТП предусматривает полное автоматическое управление при этом управление может осуществляться не только по тех критериям но и по экономическим. Организация проектирования СУ предусматривает след: 1.опр рациональной структуры контроля и управления ТП 2.выбор и обоснование методов контроля, управления и сигнализации. 3.выбор ПП м ВП. 4.выбор регуляторов и ИМ с РО 5.рациональное распределение ТСА на тех оборудовании на щитах и пультах.
Билет №2
Основные характеристики САУ.
1. Статические характеристики сау
Статические характеристики определяют статику системы, т.е. ее поведение в установившемся режиме. Статической характеристикой называется отношение выходной величины к входной величине в установившемся режиме. Статические характеристики позволяют: определить коэффициент усиления системы; степень ее нелинейности; величину статизма; произвести согласование рабочих точек системы.
2. Динамические характеристики сау
Динамические характеристики определяют динамику системы, т.е. ее поведение в неустановившемся (переходном) режиме. При этом используют следующие основные динамические характеристики: – передаточная функция; – временные характеристики; – частотные характеристики.
Временные характеристики
1. Переходная функция
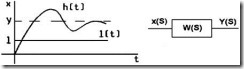
Переходной функцией h(t) называют реакцию звена или системы на единичное ступенчатое воздействие 1(t) на входе при нулевых начальных условиях:
 откуда
откуда
![]() (2.27)
(2.27)
Рис. 2.9. |
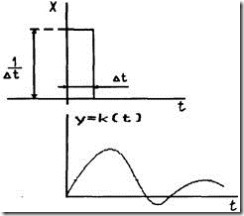
2. Импульсная переходная или весовая функция
Импульсной переходной или весовой функцией звена (системы) называют реакцию звена (системы) на единичное импульсное воздействие при нулевых начальных условиях (рис.2. 10).
Импульсная переходная функция представляет собой оригинал (обратное преобразование Лапласа передаточной функции). Зная импульсную переходную функцию k(t), можно определить передаточную функцию звена (системы):
Рис 2.10. |
![]()
![]()
![]()
![]()
 (2.28)
(2.28)
Частотные характеристики
Частотными характеристиками называют формулы и графики, характеризующие реакцию звена на гармоническое входное воздействие в установившемся режиме, т.е. вынужденные гармонические колебания звена.
Если на вход звена подается единичный синусоидальный сигнал (рис.2.11)
х(t)=sin wt,
то на выходе будет (в установившемся режиме)
у(t)=А sin (wt+j),
где А - амплитуда (усиление амплитуды);
j - сдвиг фазы относительно входного сигнала.
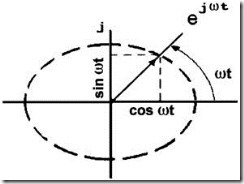
Применяется
символическая запись синусоидальных
колебаний в виде
![]() (строго
говоря, е jwt=cos wt + j
sin wt), что геометрически изображается
вращающимся единичным вектором
(рис.2.12). Проекции последнего на
прямоугольные оси дают cos wt и sin wt.
Поэтому для суждения о вынужденных
синусоидальных колебаниях звена
достаточно исследовать реакцию звена
на сигнал е jwt.
(строго
говоря, е jwt=cos wt + j
sin wt), что геометрически изображается
вращающимся единичным вектором
(рис.2.12). Проекции последнего на
прямоугольные оси дают cos wt и sin wt.
Поэтому для суждения о вынужденных
синусоидальных колебаниях звена
достаточно исследовать реакцию звена
на сигнал е jwt.
Рис. 2.11 |
Рис. 2.12 |

Пусть уравнение звена имеет вид
(TS+1)y=KSx. (2.29)
Используем символическую запись:
Подставив эти величины в уравнение звена, получим
![]()
откуда
![]()
Сравним эти выражения с передаточной функцией звена:
 (2.30)
(2.30)
Из сопоставления видно, что
![]() (2.31)
(2.31)
Функцию W(jw) называют частотной передаточной функцией или амплитудно - фазовой частотной передаточной характеристикой (АФХ). Функцию А(w) - амплитудно - частотной характеристикой (АЧХ). Функцию j(w)‑фазовой частотной характеристикой (ФЧХ).
Кроме показательной формы, W(jw) можно представить и в алгебраической:
W(jw)=U(w)+jV(w)=A(w)cos j(w)+jA(w)sin j(w), где U(w) - вещественная частотная характеристика (ВЧХ);
V (w) - мнимая частотная характеристика (МЧХ).
Связь
между частотными характеристиками.
![]() -
т.е. АЧХ представляет собой модуль
частотной передаточной функции и
определяет, во сколько раз амплитуда
выходного гармонического сигнала
отличается от амплитуды входного
сигнала.
-
т.е. АЧХ представляет собой модуль
частотной передаточной функции и
определяет, во сколько раз амплитуда
выходного гармонического сигнала
отличается от амплитуды входного
сигнала.
 -
аргумент передаточной функции W(jw),
определяет фазовый сдвиг между
выходной и входной синусоидами.
-
аргумент передаточной функции W(jw),
определяет фазовый сдвиг между
выходной и входной синусоидами.
Рис. 2.13 |

АФХ W(jw) может быть изображена как годограф на комплексной плоскости (рис.2.13) в полярных ( А,j ) либо в прямоугольных координатах ( U, V ). При этом частоту w изменяют от 0 до ¥ (сплошная кривая на рис.2. 13) или же от -¥ до ¥, когда добавляется еще симметричная к ней пунктирная кривая.
Следует отметить, что ВЧХ U(w)=А(w)cos j(w) есть четная функция частоты w, а МЧХ V(w)=А() sin j() - нечетная функция частоты. Этим и объясняется зеркальная симметрия АФХ относительно оси абсцисс.
Классификация технологических процессов и оборудования пищевых производств как объектов автоматизации и управления.
I. по технологическому циклу:
1. непрерыв. тп- процессы, в кот. преобразование сырья в продукт происходит в потоке и параметры определяют состояние тп.
2. периодического- осущ. на одной контрольной потери сырья в течение зад. времени.
3. циклические- проводятся в виде повторного цикла в потоке сырья или эн. носителя
4. комбинированные
II. по физическому назначению:
теплообменные операции- нагревание продукта
массообменные- смешивание
биотехнологич.- удаление спор, брожение
проц., связан. с фазовыми переходами – выпаривание, замораживание.
Также различают процессы: взрыво- и пожароопасные, связан. с мучным производством, сахар, аммиак, связ. с экологич. опасностью (выделение белка, жиров, кислот, щелочи, дыма.)
Каскадные системы регулирования.
На рис приведена двухконтурная АСР температуры в химическом реакторе посредством изменения расхода охлаждающей жидкости в рубашке реактора. С целью обеспечения более высокого качества регулирования, в схему введен стабилизирующий контур, в который входит регулятор АР1 поддерживающий температуру охлаждающей жидкости Тс в рубашке реактора. Значение этой температуры задается регулятором АР корректирующего контура регулирования температуры реакционной смеси Тр в реакторе.
Стадии проектирования систем автоматизации.
ГОСТом предусмотрены следующие стадии создания СУ. Две предпроектные стадии: 1.технико эконом обоснование. 2.ТЗ. Две проектные стадии: 1.технический проект 2.рабочий проект. Две завершающие стадии: 1.ввод в действие (внедрение) 2.анализ функционирования. ТЭО. Собственно к проектированию предшествуют ряд предварительных работ: 1.опр задач автоматизации 2.изучение тех процесса и характеристик оборудования 3.опр объема инф необходимой для создания СУ. В результате должны быть выявлены узкие места, опр источники потерь сырья, высокой доли ручного труда, снижение качества готовой продукции. На этом же этапе должны быть опр функциональное назначение сист приблизительно опр затраты на ее создание и получены технико эконом показатели сист. ТЗ. Все работы по проектированию СУ выполняются в соотв с ТЗ которое разрабатывает заказчик. В ТЗ опр все тех вопросы относящиеся к проектируемой сист. В нем заказчик приводит все требования и рекомендации к проектируемой сист управления. В ТЗ указывается : 1.наименование объекта (предприятия) 2.основание для проектирования (реконструкция/ новое учреждение) 3.описание тех процесса и характеристики оборудования 4.размещение пунктов управления с указанием места расположения (местный, операторский, диспечерский). 5.характеристики ОС и перечень контролируемых и регулируемых величин с указанием точности. Дополнительно к ТЗ прилагаются строительные планы с указанием площади, схем энергоснабжения, освещения, технологические схемы. ТЗ выполняется в 4 этапа: 1.предварительное обследование объекта 2.опр наиболее сложных задач автоматизации и путей их решения. 3.эскизная разработка ТЗ. 4.разработка ТЗ. После согласования ТЗ является бязательным для выполнения документом.
Билет №3
Математическое описание линейных САУ. Линеаризация.
В общем случае уравнение динамики оказывается нелинейным, так как реальные звенья САУ обычно нелинейны. В целях упрощения теории нелинейные уравнения заменяют линейными, которые приблизительно описывают динамические процессы в САУ. Получаемая при этом точность уравнений оказывается достаточной для технических задач. Процесс преобразования нелинейных уравнений в линейные называется линеаризацией уравнений динамики. Рассмотрим сначала геометрическое обоснование линеаризации.
В
нормально функционирующей САУ значение
регулируемой и всех промежуточных
величин незначительно отличается от
требуемых. В пределах малых отклонений
все нелинейные зависимости между
величинами, входящими уравнение динамики,
могут быть приближенно п редставлены
отрезками прямых линий. Например,
нелинейная статическая характеристика
звена на участке АВ (рис.26) может быть
представлена отрезком касательной в
точке номинального режима А"В".
Начало координат переносится в точку
О’, и в уравнениях записываются не
абсолютные значения величин y,u,f, а их
отклонения от номинальных значений:
редставлены
отрезками прямых линий. Например,
нелинейная статическая характеристика
звена на участке АВ (рис.26) может быть
представлена отрезком касательной в
точке номинального режима А"В".
Начало координат переносится в точку
О’, и в уравнениях записываются не
абсолютные значения величин y,u,f, а их
отклонения от номинальных значений:
![]() y
= y - yн,
u
= u - uн,
f
= f - fн. Это позволяет получить
нулевые начальные условия, если считать,
что при t
y
= y - yн,
u
= u - uн,
f
= f - fн. Это позволяет получить
нулевые начальные условия, если считать,
что при t
![]() 0
система находилась в номинальном режиме
в состоянии покоя.
0
система находилась в номинальном режиме
в состоянии покоя.
Математическое обоснование линеаризации состоит в том, что если известно значение f(a) какой - либо функции f(x) в любой точке x = a, а также значения производных от этой функции в данной точке f’(a), f”(a), ..., f(n)(a), то в любой другой достаточно близкой точке x + x значение функции можно определить, разложив ее в окрестности точки a в ряд Тейлора:
![]()
Аналогично можно разложить и функцию нескольких переменных. Для простоты возьмем упрощенный, но наиболее характерный вариант уравнения динамики САУ: F(y,y',y",u,u') = f. Здесь производные по времени u',y',y" также являются переменными. В точке, близкой к номинальному режиму: f = fн + f и F = Fн + F. Разложим функцию F в ряд Тейлора в окрестности точки номинального режима, отбрасывая члены ряда высоких порядков малости:
![]() .
.
В номинальном режиме, когда все отклонения и их производные по времени равны нулю, получаем частное решение уравнения: Fн = fн. Учитывая это и вводя обозначения получим:
ao y” + a1 y’ + a2 y = bo u’ + b1 u + co f.
Отбрасывая все знаки , получим:
aoy” + a1y’ + a2y = bou’ + b1u + cof.
Отбрасывая все знаки , получим:
В более общем случае:
aoy(n) + a1y(n-1) + ... + an - 1y’ + any = bou(m) + ... + bm - 1u’ + bmu + cof.
При этом всегда нужно помнить, что в данном уравнении используются не абсолютные значения величин y, u, f их производных по времени, а отклонения этих величин от номинальных значений. Поэтому полученное уравнение будем называть уравнением в отклонениях.
К линеаризованной САУ можно применить принцип суперпозиции: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис.27). Поэтому в дальнейшем мы ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:
aoy(n) + a1y(n-1) + ... + an - 1y’ + any = bou(m) + ... + bm - 1u’ + bmu.

Это уравнение описывает САУ в динамическом режиме лишь приближенно с той точностью, которую дает линеаризация. Однако следует помнить, что линеаризация возможна только при достаточно малых отклонениях величин и при отсутствии разрывов в функции F в окрестностях интересующей нас точки, которые могут быть созданы различными выключателями, реле и т.п.
Обычно
n
![]() m,
так как при n < m САУ технически
нереализуемы.
m,
так как при n < m САУ технически
нереализуемы.
Обосновать структуру системы автоматического регулирования для анализа объекта.
1.место установки РО (Iз).
К выбору канала управления предпочтительно в качестве канала выбирать канал энергоносителя с целью сохранения постоянства производительности объекта. Внесение регулирующего воздействия осуществляется по тому типу канала по которому К0 имеет наибольшее значение,а время запаздывания наименьшее.
К0пр=К0эн энергоноситель, К0пр»Кэн К0пр, К0пр«Кэн энергоноситель. Обосновать выбор закона регулирования для анализируемого объекта 1.формирование к требованию качества показателя Необходимо знать:
А)максимальную величину возмущения
Б)технологические требования по до В)время регулирования 2)формирование структуры регулятора А) определить место установки РО т.к. это будет влиять на Дз Б) выбор канала управления(канал энергоносителя) 3) выбор закона регулирования По методике лернера По цпкб глав проект монтажа
Принципы регулирования.
Принцип компенсации (управление по возмущению) При существовании помех разомкнутая цепь необеспечивает требуемого качества, точности и алгоритма функционирования. Для повышения точности можно попробовать измерить возмущение и по этим результатам ввести коррекцию в алгоритм управления, тем самым убрать действие возмущений. Если помеха технически не измерима, то ее компенсировать нельзя. В этом случае ошибку управления свести к нулю нельзя. Принцип обратной связи (управление по отклонению) Процесс регулирования можно построить без измерения помех, но для этого вводят в систему обратную связь. В эту обратную связь включают устройство, которое измеряет сигнал на выходе системы, а также устройство, вырабатывающее корректирующее воздействие на управляющее устройство. Наиболее часто используется частный вид: коррекция осуществляется не по самим значениям выходной величины, а по отклонениям от сигнала задания. В некоторых случаях целесообразно применение комбинированного регулирования по возмущению и по отклонению одновременно. Комбинированное регулирование обладает достоинством двух принципов: 1. Быстрота реакции на изменение возмущения. 2. Точность регулирования.
Состав проектной документации для систем автоматизации.
Технический проект это комплексная тех документация в которой отражены все вопросы автоматизации, опр затраты на создания сист и опр техникоэкономические показатели сист. Рабочий проект техническая документация в соотв с которой производятся монтаж сист управления, изготавливаются отдельные ее узлы, щиты и пульты, и т.д. Рабочий проект выполняется только после утверждения заказчиком технического проекта и подтверждение им возможности поставки ПиСА, предусмотренных тех проектом. В состав тех проекта входят: 1.чертежи – структурная схема сист, ФСА, результаты научно исследовательских работ и опытно конструкторских работ. 2.пояснительная записка – характеристики объекта, основные решения по автоматизации, технико-эконом показатели. 3.заявочные ведомости на ПиСА. 4.сметы на оборудование и монтаж. В состав рабочего проекта входят: 1.ПЭС СУ 2.чертежи общего вида щитов и пультов 3.принцип схемы питания 4.монтажные схемы щитов и пультов 5.схемы внешних соединений 6.план расположения оборудования 7.заказные спецификации. Технический проект подлежит утверждению заказчика. Рабочий проект утверждению не подлежит и передается монтажной организации за подписью заказчика. НА этапе внедрения выполняются следующие работы: 1.подготовка объекта к внедрению СУ. 2. Наладка СУ 3.опытная эксплуатация СУ. 4.приемостадочные испытания 5.дороботки сист по результатам испытаний. Анализ функционирование выполняется на этапе промышленной эксплуатации сист. Материалы полученные на этом этапе исп при проектировании аналогичных сист.
Билет №4
Переходные характеристики и их использование для описания динамических свойств объектов и систем
Переходные характеристики снимаются путем подачи на вход О типового испыт. воздействия: 1.единичное ступенчатое воздействие. Такое воздействие очень просто смоделировать на практике. Реакция О на ед ступенчатое воздействие назыв. переходной функцией. 2.Единичное импульсное воздействие. Реакция О на ед импульсное воздействие является функцией веса. Если входное воздействие изменить в к раз то соответственно реакция на выходе изменится в к раз. Установим взаимосвязь между этими испыт. воздействиями и их реакц. Зная передаточную ф можно получить соот. переходные характеристики. Для этого необходимо решить соот данное перед ф диф ур-я для начальных условий ед воздействия или импульса. …….Зная переходные характеристики можно опр реакция системы на взаимодействие произвольного вида. Исходное воздействие можно представить в виде набора ступенек рахной высоты и сдвинутой по времени. Результир реакцию объекта на это воздействие можно представить как сумму раекций на отдельные ступеньки с учетом их сдвига по времени. Чем меньше величина сдвига тем выше точность аппроксимации. ….
Исп преобраз Лапласа для опр переход ф по переход характер. *Применим преобразование Лапласа к обоим частям ур-я *. Известно что при нулевых нач условиях операторная форма записи диф ур-я при применении образ Лапласа трансформируется в такую же форму с заменой опертора р на комплексную форму S. Рассмотрим случай для переходной характеристики…..Передаточная функция есть изображение по Лапласу переходной функции умнож на S. Рассмотрим ф веса: ….передаточная ф есть изображение по Лаплассу функции Веса.
режим работы автоматизированного технологического оборудования. Привязка операции контроля и управления к реальному времени технологического процесса
При построении систем управления (x,y,z) необходимо учитывать время с которым та или иная операция необходима по алгоритму управления, измерение или определение параметров должно проводиться до включения в работу таким образом на реальное время.
Для того чтобы рассчитать общее время нужно нанести на циклограмму такой временной отрезок. В циклограмме отмечено в какое время нужно произодить то или иное воздействие. Привязку нужно производить в те моменты в которые необходимо получить значения
Методики выбора и показатели качества двухпозиционного закона регулирования.
Уставка температуры: Дифференциал: Время включения: Время выключения: Время цикла: Время запаздывания (+):Время запаздывания (-): Выбег (+): Выбег (-): Из динамических характеристик процесса двухпозиционного регулирования видно, что без вентилятора время цикла меньше, но выбег и время запаздывания больше, чем с вентилятором. Следовательно, принудительное внесение возмущающего воздействия (с вентилятором) увеличивает точность и быстродействие, но увеличивается частота включений, что менее надежно. Условия для двухпозиционного регулирования: если …….. фдоп=Аtдоп/Atном
Особенности проектирования АСУТП.
АСУТП – сист управления предназначенная для выдачи оптимальных управляющих воздействия на ТОУ. ТОУ это совокупность тех оборудования и реализ на нем в соотв с действующими тех инструкциями и регламентом тех процесса. Совместное функционирование ТОУ и АСУТП образуют автоматизированный технологический комплекс. АСУТП это СУ обеспечивающая автоматизированный сбор и обработку инф для оптимального управления ТОУ в соотв с выбранным критерием. Критерий это технико эконом показатель. СУ является АСУТП только в том случае если управление объектом можно производить в темпе протеканий тех проц, а в принятии решений по управлению принимает участие как СВТ так и человек оператор. АСУТП выполняет следующие функции: 1.управляющие – стабилизация тех параметров процесса и логическое управление оборудованием 2.информационная – это сбор и обработка инф об объекте с выдачей ее оперативному персоналу 3.вспомогательные – предназначены для поддержания работоспособности тех устройств АСУТП. В зависимости от степени участия чел-ка в процессе управления разделяют два режима работы АСУТП: 1.автоматизированный контур по управлению объектом разомкнут (советчик) 2.автоматический: супервизорный режим; режим прямого цифрового управления. Супервизорный режим подразумевает управление ТОУ в автоматическом режиме через локальные сист автоматизации. ПЦУ подразум выдачу управл воздействий в автоматическом режиме непосредственно на исп мех. АСУТП это сист самого низкого ур-ня т.к непосредственно соприкасается с тех процессом. АСУТП обладает св-вом диапозонности т.е может управлять как отдельным агрегатом так и целым цехом. АСУТП обладает самым коротким циклом управления и может работать полностью в автомат режиме. Особенности проектирования. При проектировании АСУТП применяется принцип декомпозиции т.е разбиение сист на подсист и анализу как самих подсист так и связей между ними. Основные подсистемы это вычислительные, управление, информационные, передача данных, защита. На этапе ТЭО дополнительно производится моделирование ТОУ. При разработки ТЗ доп опр требования к структуре и функциональным возможностям СВТ. На этапе тех проект разрабатываются алгоритмы управления ТОУ, выбирается общее программное обеспечение, производится моделирование процесса управления. На этапе рабочий проект разрабатываются монтажные схемы СВТ, а также планы расположения тех средств АСУТП.
Билет №5
Частотные характеристики и их использование для анализа и синтеза объектов и систем.
Важнейшей
характеристикой передаточного звена
является его частотная передаточная
функция. Для наглядного представления
частотных свойств звена используются
так называемые частотные характеристики,
которые определяют зависимость между
выходной и входной величинами в
установившемся режиме, когда на входе
имеется гармоническое воздействие вида
![]() ,
где
,
где ![]() – амплитуда гармонического сигнала, а
ω - угловая частота этого воздействия.
На выходе звена в установившемся режиме
будет иметь место также гармоническая
функция той же частоты с амплитудой
– амплитуда гармонического сигнала, а
ω - угловая частота этого воздействия.
На выходе звена в установившемся режиме
будет иметь место также гармоническая
функция той же частоты с амплитудой
![]() ,
сдвинутой по фазе на угол φ относительно
входного сигнала. Таким образом, выходной
сигнал имеет вид
,
сдвинутой по фазе на угол φ относительно
входного сигнала. Таким образом, выходной
сигнал имеет вид ![]() .
Изменяя частоту входного сигнала, можно
проследить зависимость отношения
амплитуд от частоты
.
Изменяя частоту входного сигнала, можно
проследить зависимость отношения
амплитуд от частоты ![]() и зависимость фазового сдвига от частоты
и зависимость фазового сдвига от частоты
![]() .
.
![]() – амплитудная частотная характеристика
(АЧХ). Она характеризует способность
звена пропускать сигналы разных частот.
– амплитудная частотная характеристика
(АЧХ). Она характеризует способность
звена пропускать сигналы разных частот.
![]() -
фазовая частотная характеристика (ФЧХ).
По ФЧХ определяют фазовые сдвиги,
вносимые звеном на различных частотах.
-
фазовая частотная характеристика (ФЧХ).
По ФЧХ определяют фазовые сдвиги,
вносимые звеном на различных частотах.
Любой сложный объект автоматической системы может быть представлен в виде последовательного соединения типовых звеньев. При этом передаточная функция такого объекта будет определяться произведением передаточных функций отдельных звеньев Wo(p)=W1(p)·W2(p)… Соответственно частотная передаточная функция, записанная в показательной форме, будет иметь вид А(ω)еjφ(ω)=А1(ω)еjφ1(ω)·А2(ω)еjφ2(ω) АФЧХ объекта строится на комплексной плоскости. По вещественной оси откладывается U(ω)=ReW(jω), а по оси мнимых V(ω)=ImW(jω). Изображение частотной передаточной функции на комплексной плоскости при фиксированном значении ω=ω1 представляется вектором, длина которого A(ω1), а угол – аргументом φ(ω1). При изменении частоты от 0 до ∞ конец вектора частотной передаточной функции опишет годограф, который называется амплитудно-фазовой частотной характеристикой звена (АФЧХ). АФЧХ позволяет наглядно увидеть одновременно как отношение амплитуд выходной и входной величин, так и сдвиг по фазе между ними для каждого значения частоты входного сигнала. Для оценки динамических свойств звеньев в теории автоматического регулирования широко используются логарифмические частотные характеристики. Для практики удобнее пользоваться десятичным логарифмом и строить отдельно логарифмическую амплитудную частотную характеристику (ЛАХ) и логарифмическую фазовую частотную характеристику (ЛФХ). Применение ЛАХ значительно упрощает процесс построения А(ω), поскольку логарифм произведения равен сумме логарифмов сомножителей, а общий сдвиг по фазе равен сумме сдвигов фаз отдельных звеньев.
Методы и технические средства измерения температуры.
Методы и технические средства измерения температуры
Классификация средств измерения по принципу действия: