

Принцип работы манипулятора
Принцип работ манипулятора рассмотрим на примере использования его в сборочной машине по переносу контакта из вибробункера на поворотный стол рукой, оснащенной вакуумным захватом /рис. 5/.
В исходном положении рука 1 манипулятора 2 находится над вибробункером 3 и вакуумный захват 4 затягивает сориентированный контакт 5 и вибробункера.
После подачи сигнала извне, например, от поворотного стола после проведения им цикла деления, на электронную схему манипулятора, тиристорный ключ открывается и на электродвигатель поступает напряжение. Электродвигатель приводит во вращение червяк и через червячную передачу получает вращение кулачковый вал, совершавший один оборот за время цикла работы манипулятора.
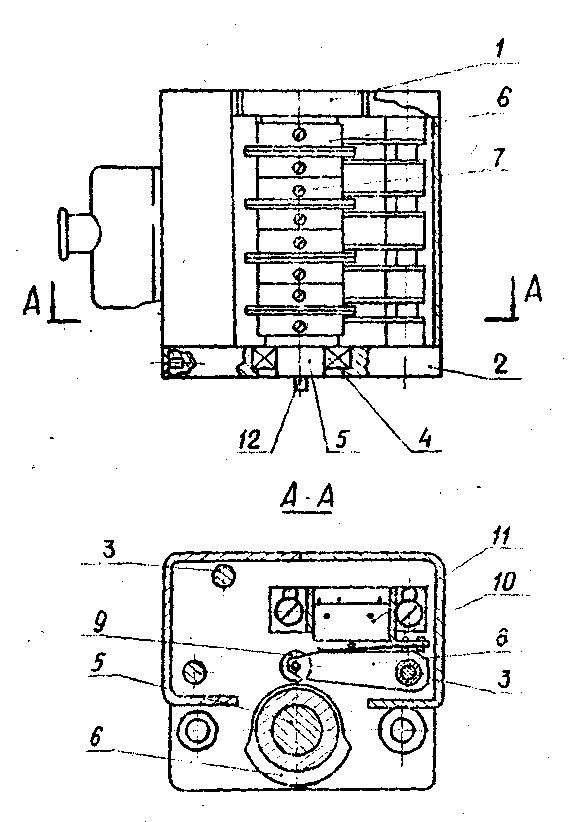
Рис.3 Командаппарат манипулятора МРУ-901А
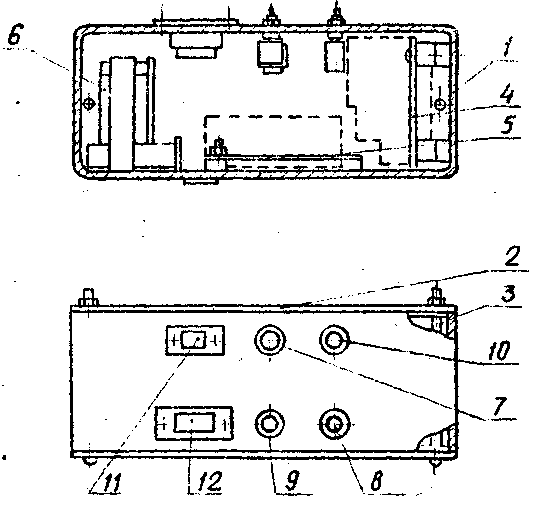
Рис.4 Пульт управления манипулятором МРУ-901А
Кулачок 6 /рис. 3/ черев рычаг 7 сообщает валу с закрепленное на нем рукой 2 вертикальное перемещение вверх. Рука выносит захваченный контакт из вибробункера. Затем вертикальное перемещение прекращается, а кулачок 9 через рычаги 10 и 11, штифт 12 в секторе 13 и зубчатую передачу 13, 8 сообщает руке с захваченным контактом поворот на угол в горизонтальной плоскости до упора штифта 24 рука 2 в винт 23, после чего кулачок 6 сообщает руке вертикальное перемещение /рис. 5/, установленную на поворотном столе 7. В это же время движение от командарпарата 8 поступает сигнал на отключение вакуума электроклапаном 9.

Рис.5 Пример использования манипулятора МРУ-901А в сборочной машине
Вакуумный захват 4 отпускает контакт 5, и он остается в матрице 6, а рука возвращается в исходное положение. При достижении рукой исходного положения срабатывает датчик 27 /рис. 1/, выдающий сигнал на остановку двигателя и разрешающий поворотному столу /рис. 5/ провести цикл деления.
В исходном положении руки вакуумный захват 4 затягивает следующий контакт 5 из вибробункера 3 и при поступлении сигнала извне цикл работы манипулятора повторяется.
Подготовка манипулятора к работе
Подготовку манипулятора к работе рассмотрим на примере использования его в сборочной машине по переносу контакта из вибробункера на поворотный стол рукой, оснащенной вакуумным захватом /рис. 5/.
1. Ослабить крепежные винты 10 так, чтобы упоры 11 я 12 могли свободно перемещаться в кольцевой проточке 13 плиты 14. Ослабить крепление датчика 15.
2. Предварительно выставить манипулятор на станине сборочной машины таким образом, чтобы ось захватного органа 4 руки 1 при ее угловом повороте вместе с валом 16 проходила через ось матрицы 6, закрепленной на поворотном столе 7, с точностью ±0,3 им. В этом положении закрепить манипулятор к станине.
3. Отвернуть винт 17, крепящий чашу вибробункера 3, и повернуть чашу вокруг оси так, чтобы ось сориентированного контакта на выдаче из чаши совпадала с осью захватного органа 4 рука 1 при ее угловом повороте с точность ±0.3 мм. Закрепить чашу винтом 17.
4. Отрегулировать угол поворота руки. Для этого отвернуть винты, крепящие крышку 30 /рис. 2/, освободить шпонку 31 от клинового зажима 15, отвернув винт 16.
5. Подать на разъемы манипулятора напряжение питания, тумблер
"режим" на пульте управления переключить в положение "Непрерывный", а тумблер включения сети в положение "Сеть". Рука манипулятора начнет совершать рабочие движения.
6. Выключить тумблер "Сеть" и выставить руку 1 /рис. 5/ на валу 16 так, чтобы при повторном включении манипулятора рука совершила угловые колебания с одинаковым перебегом или с одинаковым недобегом до оси матрицы, установленной на поворотном столе, и до оси сориентированного кристалла 5 в вибробункере 3, При необходимости повторить эту операцию несколько раз.
7. Включить тумблер "Сеть" и, перемещая кнопку 31 /рис. 2/ со штифтом 12 винтом 14, добиться, чтобы при выключении тумблера "Сеть" рука совершила угловые колебания с перебегом осей матрицы и сориентированного контакта на 2...3 мм. После этого закрепить шпонку 31 клиновым зажимом 15, вращая винт 16. Привернуть крышку 30.
8. Выставить винты 18 /ряс. 5/ в упорах 11 и 12 так, чтобы их опорные поверхности выступали на 1...2 мм.
9. Перемещать упоры 11 и 12 по кольцевой проточке 13 плиты 14 до соприкосновения винтов со штифтом 19 руки 1 в ее крайних положениях. В этих положениях закрепить упоры винтами 10.
10. Выставить руку по высоте, что обеспечивается перемещением руки по валу 16 регулировкой винтов 19. Винты законтрить гайками.
11. Провести точное совмещение оси захватного органа 4 рука 1 в оси матрицы 6. Для этого включить манипулятор в непрерывную работу и остановить его в тот момент, когда рука коснется винта 19 упора 11. Ослабить винты 20 /рис. 5/, крепящие плиту 21 так, чтобы они за счет сил трения еще удерживали манипулятор от перемещения, но при приложении усилия позволяли перемещать его по плите. Сдвинуть манипулятор на плите в направлении трех регулировочных винтов 36 /рис. 1/ в пределах зазора под крепежные винты, при этом плита не должна касаться трех регулировочных винтов 36. Затем с помощью винтов 36 и винта 18 /рис. 1/ упора 11 добиться точного совмещения оси захватного органа 4 руки и оси матрицы 6. В этом положении плита должна касаться всех трех винтов 36 /рис. 1/. Законтрить все регулировочные винты и закрепить манипулятор крепежными винтами 20.
12. Провести точное совмещение оси захватного органа 4 руки и оси контакта 5, сориентированного в вибробункере 3, для этого включить манипулятор в непрерывную работу и остановить его в тот момент, когда рука косгется винта 19 упора 12. Отвернуть винт 17, крепящий чашу к виброприводу и поворотом чаша вокруг оси, а также перемещением винта 18 упора 12 добиться точного совмещения оси захватного органа 4 и оси сориентированного контакта 5. Законтрить винт 18 и закрепить чашу винтом 17.
13. Выставить датчик 15 исходного положения так, чтобы при положении руки 1 на винте 18 упора 12 над сориентированным контактом, нормально разомкнутые контакты микропереключателя датчика 15 оказались замкнутыми. Замыкание контактов микропереключателя осуществляется упором 22 через пружину 23.
14. Подключить к манипулятору систему вакуума. Тумблер "Режим" переключить в соложение "Ждущий" и включить тумблер "Сеть". Нажать на кнопку "Пуск", рука своим захватом затянет контакт из чаши и натает его переносить в матрицу поворотного стола. В тот момент, когда контакт 5 начнет садиться в матрицу 6, выключить тумблер "Сеть", рука 1 прекратит движение. 3 этом положении выставить кулачки командаппарата, управляющие работой электроклапана 9 так, чтобы на электроклапан поступал сигнал на его переключение, отключающий вакуумную систему от захватного органа руки. Захватный орган руки, освободит контакт-изделие.
Включить тумблер "Сеть* и нажать кнопку "Пуск". Рука вернется в исходное положение, а контакт останется в матрице 6.
15. Проварить правильность переноса контактов из чаши в матрицу, для чего осуществить несколько переносов контакта, нажимая каждый раз кнопку "Пуск". При необходимости повторить перечисленные выше регулировки. После того, как убедиться в надежности переноса контакта из чаши в матрицу, манипулятор готов к работе.
РАБОТА НА УСТАНОВКЕ
1. Подготовить манипулятор к работе.
Переключить тумблер "Решим" на пульте управления /рис.5/ в положение "Ждущий", а тумблер включения сети, в положение "Сеть". Рука манипулятора начнет совершать рабочие движения.
3. Произвести измерения в соответствия с заданиями 1 и 2.
4. По окончании работы выключить тумблер "Сеть".
ТРЕБОВАНИЯ БЕЗОПАСНОСТИ ТРУДА
К работе с манипулятором и к его согласованию с исполнительными механизмами допускаются лица, прошедшие инструктаж по технике безопасности.
Запрещается подключение манипулятора к сети питания без заземления электродвигателя
Выполнение любых ремонтных или наладочных работ на манипуляторе производить только при отключенной сети питания.
При появлении посторонних шумов отключить сеть питания, найти причину возникновения шума, устранить ее.
Эксплуатацию манипулятора производить согласно "Правилам технической эксплуатации электроустановок потребителей'' и "Правилам техники безопасности при эксплуатации электроустановок потребителей".
ВНИМАНИЕ! Студенты не допускаются к ремонтным и настроечным работам на манипуляторе. К этим работам допускаются лица, имеющие 1У квалификационную группу.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ ЗАДАНИЕ
1. Исследовать динамические параметры манипулятора. Для проведения работы подготовить к работе манипулятор. Получить набор грузов, имитирующих переносимое изделие и секундомер. Последовательно помещая грузы на руку манипулятора, замерить время перемещения руки манипулятора в горизонтальном /поворот/ и вертикальном направлениях. При наличии каждого груза произвести не менее пяти измерений. Набор грузов имеет следующие номинальные параметры: 200, 400, 600, 800, 1000, 1500 г.
2. Исследовать зависимость мощности привода манипулятора /электродвигателя/ от нагрузки манипулятора /величины груза/.
Для этого, помещая на руку манипулятора грузы различной массы, производить замеры тока и напряжения по измерительном приборам /амперметр, вольтметр/.
ЗАКЛЮЧЕНИЕ
кафедры ЭМС на методические указания к выполнению лабораторной работы. «Изучение конструкции и исследование динамических характеристик автоматического манипулятора МРУ-901А»
подготовлены к изданию
к.т.н., с.н.с. Ворониным В.И., к.т.н., доц. Лемякин А.А..
Методические указания предназначены для проведения лабораторных занятий по дисциплине ДС. 02.10 «Автоматические комплексы ЭП» для студентов специальности 200500 «Электронное машиностроение»
При проведении лабораторной работы студенты изучают следующие вопросы и получают навыки исследования динамических характеристик промышленных автоматических манипуляторов:
- устройство автоматического манипулятора МРУ-901А;
- исследование динамических характеристик манипулятора (зависимости времени срабатывания руки манипулятора и электрических параметров привода от величины переносимого груза);
- примеры использования манипулятора в РТК сборочного штамповочных производств.
Предложенные методические указания будут способствовать закреплению теоретического материала по разделу «РТК ЭП» и формированию у студентов навыков исследовательской работы.
Методические указания рассмотрены на заседании кафедры ЭМС (Протокол №1 от 02.08.2010 г.) и рекомендуются к изданию через РИЦ СГТУ.
Зав.каф. ЭМС, д.т.н., проф. Г.В. Конюшков
Рецензент к.т.н., доц. О.Ю. Жевалев
Подписи профессора Конюшкова Г.В, доцента Жевалева О.Ю. заверяю.
Декан машиностроительного факультета
Д.т.н., профессор О.Ю. Давиденко
ИЗУЧЕНИЕ КОНСТРУКЦИИ И ИССЛЕДОВАНИЕ
ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЧЕСКОГО
МАНИПУЛЯТОРА МРУ-901А
Методические указания к лабораторной работе
Составили: Воронин Валерий Иванович
Лемякин Андрей Алексеевич
Рецензент О.Ю. Жевалев
Корректор Ю.С.Ольховцева
Подписано к печати Формат 60х84 1/16
Бум.обер. Усл.печ.л. Уч.-изд.л.
Тираж 100 экз. Заказ Бесплатно
Саратовский государственный технический университет