

Лекція № 4
Тема: Характеристики корпусу корабля
1. Загальні поняття і визначення.
2. Опір води при рівномірному прямолінійному русі корабля і його основні складові.
3. Методи визначення опору і буксирувальної потужності корпусу корабля.
Навчальна література:
Ф.М. Кацман, д.В. Дорогостайский Теория судна и движители. –л.: Судостроение, 1979. -280 с. §§ 10 ÷ 16.
В.Д. Колосов и др. Корабельные ДЭУ: Учебное пособие. -Л.: ЛВВМИУ, 1993, гл. 1. §§1.1 - 1.4.
Ломоть В.К. та ін. Теория корабля. ЛВВМИУ. Л.: 1983, VI, §§ 6.1÷6.3.
Г.М. Хуршудян и др. Корабельные ДЭУ и основы их общего проектирования: Учебное пособие. –Л.: ЛВВМИУ, 1980, гл. 1. §§1.11.4.
Ермолаев А.Н. и др. Корабельные энергетические установки с двигателями внутреннего сгорания и их боевое использование, -М.: 1963.
Методичні вказівки щодо самостійної підготовки та самоконтролю курсантів по засвоєнню навчального матеріалу з дисципліни «Корабельні газотурбінні, дизель-газотурбінні і дизельні енергетичні установки». –С.: СВМІ, 2007 р.
Вступ
Характер взаємодії основних елементів пропульсивного комплексу корабля: корпуса, головних двигунів передач потужності та рушіїв визначає область можливих режимів використання ПУ, вибір найбільш раціональних режимів її роботи та припустимих навантажень головних двигунів.
Для руху корабля із заданою швидкістю ходу V рушій (гребний гвинт) повинен створювати упор Р, під яким розуміється осьова рушійна сила, що їм розвивається, та переданої корпусу корабля через валопровід і упорний підшипник. При цьому переборюється повний опір руху корабля R, що складається з опору води і повітряного опору. Останнє для більшості типів кораблів становить відносно малу частину повного опору, у силу чого припустимо обмежитися розглядом тільки опору води руху корабля. Чим більше опір руху R, тим більший упор повинен створювати рушій і тим більшою потужність повинна мати ПУ корабля.
Актуальність лекції складається у вивченні основних характеристик корпуса (опору руху та буксирувальних) корабля, зміна яких найбільше істотно впливає на тактико-технічні характеристики ГЕУ і корабля в цілому. Зміна характеристик корпуса в процесі технічної експлуатації в основному відбувається протягом часу за рахунок явища обростання корпуса, а при веденні бойових дій при різних ушкодженнях корпуса і гвинто-рульової групи.
1. Загальні поняття і визначення
Здатність корабля в заданих умовах плавання розвивати необхідну швидкість ходу при використанні певної частини потужності головних двигунів називається ходовістю корабля. Ходовість корабля забезпечується головною енергетичною установкою, що, використовуючи потужність головних двигунів створює за допомогою рушіїв необхідну силу упору (тяги), що передається на корпус корабля для подолання опору руху.
Характеристикою корпуса називається залежність повного опору руху корабля R від швидкості ходу. Представляється графічно або в табличній формі.
Корабель при своєму русі виводить маси води зі стану спокою і сприймає їхню реакцію у вигляді гідродинамічних сил, розподілених по зовнішньому обшиванню його корпуса. Можна виділити дві основні гідродинамічні сили: архімедова сила підтримки Rz = V (визначає плавучість) і безпосередньо сила реакції води R руху корпуса корабля. Дія гідродинамічних сил реакції води можна привести до однієї рівнодіючої сили F і моменту сил М, які лежать у діаметральній площині.
Складова R головного вектора гідродинамічних сил F, спрямована протилежно вектору швидкості зі ЦТ корабля, називається опір води руху корабля.
Складова Rz головного вектора гідродинамічних сил F, спрямована перпендикулярно до вектора швидкості корабля, називається піднімальною силою.

Рисунок 1. Гідродинамічні сили і момент. |
Для подолання опору R до корпуса корабля необхідно прикласти рушійну силу (силу тяги), що створюється рушіями. Щоб забезпечити горизонтальний прямолінійний рух корабля з постійною швидкістю Vs, сумарна сила тяги рушіїв Ре повинна дорівнювати по величині та бути протилежною по напрямку силі R опору води руху корабля (опору корпуса без рушіїв)
Ре = R або Ре Vs = R Vs,
де |
Ре Vs – сумарна корисна потужність, що розвивається рушіями; |
|
R Vs = NR – буксирувальна потужність, що витрачається на подолання опору R. |
Потужність, яку необхідно підвести від двигунів до рушіїв для створення ними необхідної тяги, називається сумарною валовою потужністю або потужністю на маточинах гребних гвинтів
![]() ,
,
де |
- пропульсивний коефіцієнт, що характеризує ефективність роботи системи «корпус – рушії». |
Сумарна потужність головних двигунів дорівнює
![]() ,
,
де |
в = 0,96 ÷ 0,98 – ККД валопроводу, що враховує втрати потужності при передачі її від головної передачі до рушіїв; |
|
п = 0,96 – ККД головної передачі, що враховує втрати потужності в передачі потужності від ГД до валопроводу. |
При малих швидкостях руху гідродинамічні сили досить малі (Rz ~ 0). У крупних та тихохідних суден вертикальна складова Rz і момент М малі, і положення судна на ходу залишається практично таким же, як у спокої. Зі збільшенням швидкості корабля вплив гідродинамічних тисків, які створює поле швидкостей на поверхню корпуса, зростає. У випадку досягнення високих швидкостей вертикальна складова гідродинамічних сил може перевищити гідростатичну архімедову силу.
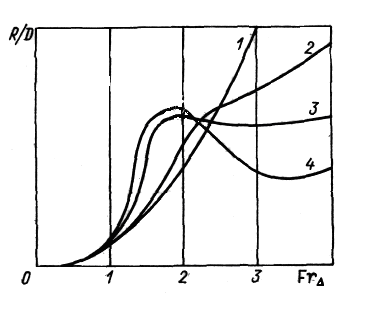
Для надводних кораблів залежно від ролі гідростатичної сили підтримки в забезпеченні умови вертикальної рівноваги корабля розрізняють чотири характерних режими руху, які впливають на характеристики ходовості корабля:
1. Режим плавання, при якому посадка корабля, та отже, й величина зануреного обсягу V майже не відрізняються від тих, які має корабель при відсутності ходу. Режим плавання характерний для великих НК і ПЧ у підводному положенні на всіх швидкостях ходу.
2. Перехідний режим, при якому на корпусі корабля виникає значна по величині гідродинамічна сила підтримки, у результаті чого змінюється посадка корабля і помітно зменшується занурений обсяг V. Такий режим має місце у швидкохідних кораблів малої водотоннажності та водотоннажністних катерів.
3. Режим глісирування (ковзання по поверхні води) при якому в глісируючих катерів середнє осідання й занурений обсяг дуже малі в порівнянні з їх значеннями при відсутності ходу. Зменшення середнього осідання й зануреного обсягу зі збільшенням швидкості ходу веде до різкого зниження опору води руху корабля.
4. Режими руху з використанням динамічних принципів підтримки (ДПП) кораблів на підводних крилах (КПК), на повітряній подушці (КПП) і екранопланів (ЕП). Це рух корабля по поверхні води, при якому підтримуюча сила на 90 ÷ 95 % обумовлена гідродинамічними явищами.
У цих режимах величина зануреного обсягу V практично дорівнює нулю і гідродинамічній силі підтримки стають визначальними в забезпеченні умови вертикальної рівноваги корабля на всіх основних швидкостях ходу.
|
Рисунок 2. Залежність питомого опору руху кораблів різного типу від числа Фруда. |
У період розгону судна і переходу його руху на розрахунковий режим на підводних крилах при швидкості в межах 0,5 ÷ 0,7 від повної опір руху досягає максимуму або близької до цього величини. При цьому в районі горба опору гідродинамічні сили підтримки становлять 25÷35% водотоннажності, а частота обертання головних двигунів дорівнює 0,60 ÷ 0,70 повної. Отже, головні двигуни можуть розвивати лише часткову потужність.