

Конспект лекций по дисциплине Уравнения Математической Физики (УМФ)
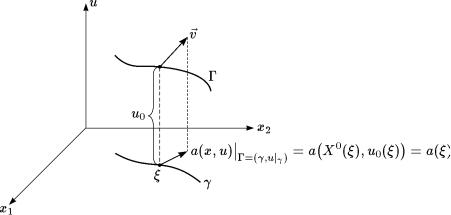
.pdf1)γ – GLADKAQ GIPERPOWERHNOSTX;
2)u0 – GLADKAQ FUNKCIQ, ZADANNAQ NA γ;
3)a(x), b(x), f(x) C(1)(D), γ D Rn, I a(x) = 0, x D;
4)a(x) NE KASAETSQ GIPERPOWERHNOSTI γ NI W ODNOJ TO^KE, T. E. WEKTORY lj = ∂X0 ,
∂ξj
j = 1, . . . , (n − 1), I WEKTOR a x = X0(ξ) LINEJNO NEZAWISIMY:
det ∂ξ1 |
· · · ∂ξn−1 |
a X0 |
(ξ) |
|
|
= 0, |
DLQ L@BOGO ξ I0. |
||
|
∂X0 |
|
∂X0 |
|
|
|
|
|
|
tOGDA ALGORITM a2, |
W KOTOROM |
SLEDUET |
|
SKALQRNYJ |
PARAMETR ξ ZAMENITX NA |
||||
(n − 1)-MERNYJ WEKTOR-PARAMETR ξ = (ξ1, . . . , ξn−1), A POD x PONIMATX n-MERNYJ WEKTOR x = (x1, x2, . . . , xn), OPREDELQET FUNKCI@ (2.21), QWLQ@]U@SQ ODIN RAZ DIFFERENCIRUEMYM RE[ENIEM ZADA^I (3.1)–(3.2).
3.2kORREKTNOSTX ALGORITMA a1
tEOREMA 3.3. pUSTX WYPOLNENY USLOWIQ:
1)γ – GLADKAQ KRIWAQ;
2)u0 – GLADKAQ FUNKCIQ;
3) a1 |
(x, u), a2(x, u), b(x, u) C(1) D , γ D Rx,u3 |
I POLNOE WEKTORNOE POLE |
|
|
|
|
|
v(x, u) = a(x, u), b(x, u) = 0
PRI |
(x, u) |
D |
RIS |
. 3.3); |
|
( |
|
4)PROEKCIQ HARAKTERISTIK HARAKTERISTI^ESKOJ SISTEMY NA R2x NI W ODNOJ TO^KE NA KRIWOJ γ NE KASAETSQ γ:
|
X0 |
1 |
|
|
(ξ) a1(x, u) |
Γ |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
(ξ) a2(x, u) |
|
= 0 |
(RIS. 3.3). |
||
det X0 |
|
Γ |
||||||
|
|
|
|
|
|
|
|
|
tOGDA FORMULA (2.11) OPREDELQET ODIN RAZ DIFFERENCIRUEMU@ FUNKCI@ W NEKOTOROJ
OKRESTNOSTI Vδ(γ) = x R2: x = X(ξ, τ), ξ I0, τ Iξ, J(ξ, τ) = 0 .
dOKAZATELXSTWO ANALOGI^NO DOKAZATELXSTWU TEOREMY 3.1.
21
3.3iNTEGRIROWANIE URAWNENIQ NERAZRYWNOSTI
I URAWNENIJ PERENOSA
3.3.1iNTEGRIROWANIE URAWNENIQ NERAZRYWNOSTI
rASSMOTRIM W TREHMERNOM PROSTRANSTWE TE^ENIE IDEALXNOJ SVIMAEMOJ VIDKOSTI |
|||||||||||||
pUSTX ρ(x, t) – |
|
|
|
|
|
|
x |
t. iZ |
|
|
- |
||
(BEZ TRENIQ, BEZ ISTO^NIKA I STOKA) S ZADANNYM POLEM SKOROSTEJ v(x, t) C(1) |
Rx,t4 . |
|
|||||||||||
|
|
|
PLOTNOSTX VIDKOSTI W TO^KE W MOMENT WREMENI |
|
ZAKONA SOHRA |
|
|||||||
NENIQ MASSY SLEDUET, ^TO FUNKCIQ ρ(x, t) UDOWLETWORQET u~p PERWOGO PORQDKA |
|
|
|||||||||||
|
|
|
|
|
|
|
∂ρ |
|
|
|
|
|
|
(3.3) |
|
|
|
|
|
|
|
+ divx ρ(x, t)v(x, t) = 0, |
|
|
|
|
|
|
|
|
|
|
|
∂t |
|
|
|
|
|||
KOTOROE NAZYWAETSQ URAWNENIEM NERAZRYWNOSTI. |
|
|
|
|
|||||||||
pOSTAWIM DLQ (3.3) ZADA^U kO[I: |
|
|
|
|
|
||||||||
(3.4) |
|
|
|
|
|
|
|
ρ|t=0 = ρ0(x), |
|
|
|
|
|
pOLXZUQSX |
|
|
|
|
|
|
|
|
|
|
|
||
GDE ρ0(x) C(1) |
R3 |
– ZADANNAQ NA^ALXNAQ PLOTNOSTX VIDKOSTI. |
|
|
|
|
|||||||
|
FORMULOJ WEKTORNOGO ANALIZA |
|
|
|
|
|
|||||||
(3.5) |
|
|
|
|
|
divx ρv = xρ, v R3 + ρ divx v, |
|
|
|
|
|||
URAWNENIE (3.3) ZAPI[EM W SLEDU@]EM WIDE: |
|
|
|
|
|
||||||||
|
|
|
|
|
∂ρ |
|
|
|
|
|
|||
(3.3 ) |
|
|
|
|
|
+ xρ, v(x, t) R3 + ρ divx v(x, t) = 0. |
|
|
|
|
|||
|
|
|
|
∂t |
|
|
|
|
|||||
uRAWNENIE (?? ) PREDSTAWLQET SOBOJ LINEJNOE ODNORODNOE (f = 0) URAWNENIE PERWOGO
PORQDKA (SM. PUNKT 1.2) RAZMERNOSTI n = 4 ((x, t) |
R4). gIPERPOWERHNOSTX γ R3 |
4, |
||
OTWE^A@]AQ NA^ALXNOMU USLOWI@ |
(3.4), |
IMEET WID |
γ = (x, t): t = 0, x = ξ, ξ R , |
|
PRI^EM ρ|γ = ρ0(ξ). |
|
|||
o^EWIDNO, ^TO W DANNOM PRIMERE WYPOLNENY WSE USLOWIQ TEOREMY 3.2, OBESPE^IWA- @]IE SU]ESTWOWANIE EDINSTWENNOGO GLADKOGO RE[ENIQ ZADA^I (3.3)–(3.4) W NEKOTOROJ
22
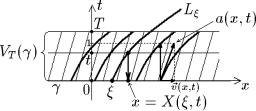
OKRESTNOSTI V (γ) (δ = T ) GIPERPOWERHNOSTI γ (RIS. 3.4). w ^ASTNOSTI, WEKTORNOE POLE
T
a(x, t) = v(x, t), 1 , a(x, t) R1, OTWE^A@]EE (3.3), TRANSWERSALXNO γ.
pROINTEGRIRUEM ZADA^U (3.3)–(3.4) S POMO]X@ ALGORITMA a2.
1◦. hARAKTERISTI^ESKAQ SISTEMA W RAS[IRENNOM FAZOWOM PROSTRANSTWE Rx,t4 |
IMEET WID |
|||||||||
|
|
|
dx |
x R3, |
|
|
||||
|
|
|
= x˙ = v(x, t), |
|
|
|||||
(3.6) |
|
dτ |
|
|
||||||
|
|
dt |
= t˙ = 1. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
2◦. sOOTWETSTWU@]IE |
NA^ALXNYE USLOWIQ DLQ \TOJ SISTEMY |
: |
|
|||||||
|
|
|
|
|
|
|
|
|||
(3.7) |
|
|
x |
τ=0 = ξ = (ξ1, ξ2, ξ3) |
|
R3 |
, |
|
|
|
|
t |τ=0 = 0. |
|
|
|
|
|
||||
|
|
|
| |
|
|
|
|
|
|
|
oBOZNA^IM RE[ENIE ZADA^I (3.6)–(3.7) NA INTERWALE Iδ = (0, δ), δ > 0 ZA |
|
|||||||||
(3.8) |
x = X(ξ, τ), |
x, ξ R3, |
t = τ, |
τ [0, T ]; |
|
|||||
Lξ – SOOTWETSTWU@]AQ HARAKTERISTIKA, WYHODQ]AQ IZ TO^KI ξ W MOMENT WREME-
NI τ = 0 (RIS. 3.4).
3◦. UDOWLETWORQET SLEDU@]EJ ZADA^E kO[I: |
|
|
( ) Lξ |
= ˜( ) – |
|||||
pLOTNOSTX SREDY ρ(x, t) W LAGRANVEWYH KOORDINATAH – FUNKCIQ ρ x, t |
|
ρ ξ, τ |
|||||||
|
|||||||||
|
|
dρ˜ |
|
v(x, t) |
|
= 0, |
|
|
|
(3.9) |
| |
|
|
|
|
|
|||
dτ (ξ, τ) + ρ˜(ξ, τ) divx |
x=X(ξ,τ), t=τ |
|
|
||||||
o^EWIDNO, ^TO |
|
! |
|
" |
|
|
|
||
|
ρ˜ τ=0 = ρ0(ξ). |
|
|
|
|
||||
|
RE[ENIE \TOJ ZADA^I IMEET WID |
|
|
|
|
||||
|
|
|
|
Rτ |
(divx v)|x=X(ξ,τ ), t=τ dτ |
|
|
|
|
(3.10) |
|
|
|
− |
. |
|
|
||
|
|
ρ˜(ξ, τ) = ρ0(ξ)e 0 |
|
|
|
|
|||
4◦. rAZRE[IM SISTEMU (3.8) OTNOSITELXNO τ I ξ:
τ = t,
ξ = ξ(x, t),
23
GDE WEKTOR-FUNKCIQ ξ(x, t) = (ξ1, ξ2, ξ3)(x, t) – GLADKOE RE[ENIE SISTEMY URAWNENIJ
(3.11) |
|
|
|
|
|
xi = Xi(ξ, t), |
i = 1, 2, 3. |
|
|
|
|
|
|
|
||||||||||||||
zDESX X(ξ, t) – PROEKCIQ TO^KI (S KOORDINATOJ t) NA HARAKTERISTIKE Lξ |
NA KONFIGU- |
|||||||||||||||||||||||||||
RACIONNOE PROSTRANSTWO Rx3 |
(RIS. 3.4) – ESTX RE[ENIE ZADA^I kO[I |
|
|
|
||||||||||||||||||||||||
(3.12) |
|
|
|
|
|
|
|
|
|
x = v(x, t), |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
x˙ |
t=0 = ξ. |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
wY^ISLIM SOOTWETSTWU@]IJ QKOBIAN: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
J(ξ, τ) τ=t |
= |
|
( |
|
|
|
|
|
|
|
|
= det |
|
|
|
|
|
|
|
= |
|
|||||||
|
|
|
|
|
|
|
∂ξ |
|
∂τ |
|
|
|||||||||||||||||
|
D(ξ, τ) |
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
τ=t |
|
|
|
|
|
|
0 |
|
|
1 |
|
|
τ=t |
|
|
|||||
|
|
|
|
D X ξ, τ), t(ξ, τ) |
|
|
|
|
|
|
|
|
|
∂X(ξ, τ) |
∂X(ξ, τ) |
|
|
|
||||||||||
|
|
|
|
|
∂X(ξ, t) |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= det |
|
|
= det |
|
∂X |
(ξ, t) 3 3 = Jx(ξ, t). |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
∂ξ |
|
∂ξj |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
|
|
|
|
|
|
|
I BUDEM S^ITATX, ^TO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(3.13) |
|
|
|
|
|
|
|
|
|
Jx(ξ, t) = 0. |
|
|
|
|
|
|
|
|
||||||||||
(RIS. 3.4) RE[ENIE ZADA^I (3.3)–(3.4) OPREDELQETSQ FORMULOJ |
|
|
|
|
||||||||||||||||||||||||
5◦. tOGDA W OKRESTNOSTI VT (γ) = |
(x, t) |
|
|
|
R4: x = X(ξ, t), t |
|
[0, T ] I Jx(ξ, t) = 0 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(3.14) |
|
ρ(x, t) = ρ˜(ξ, τ) |
ξ=ξ(x,t), τ=t |
= 'ρ0(ξ)e− |
0t divx v(x,t)|x=X(ξ,t ) dt ( |
|
. |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tEOREMA |
|
pUSTX PRI |
|
" |
|
I |
|
|
|
|
|
|
|
|
3 WYPOLNQETSQ USLOWIE |
|
tOGDA FOR |
|
||||||||||
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ξ=ξ(x,t) |
|
||||
|
3.4. |
|
|
|
t [0, T ] |
|
ξ R |
|
|
|
|
|
|
|
(3.13). |
|
|
- |
||||||||||
MULA (3.14) PREOBRAZUETSQ K SLEDU@]EMU WIDU: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
ρ0 |
(ξ) |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.15) |
|
|
|
|
ρ(x, t) = |
|
Jx(ξ, t) |
|
|
, |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ξ=ξ(x,t)
GDE, NAPOMNIM,
(3.16) |
Jx(ξ, t) = det |
∂X(ξ, t) |
= 0, |
t [0, T ], ξ R3, |
|
|
|
||||
∂ξ |
|||||
WEKTOR-FUNKCIQ X(ξ, t) – RE[ENIE ZADA^I kO[I (3.12), A ξ = ξ(x, t) – EDINSTWENNOE GLADKOE RE[ENIE SISTEMY (3.11).
dOKAZATELXSTWO \TOJ TEOREMY OSNOWYWAETSQ NA IZWESTNOJ FORMULE lIUWILLQ.
lEMMA 3.1 (FORMULA lIUWILLQ). qKOBIAN Jx(ξ, t) UDOWLETWORQET URAWNENI@
|
d |
|
|
(3.17) |
dtJx(ξ, t) = Jx(ξ, t) divx v(x, t) |
x=X(ξ,t). |
|
|
|
|
|
24

dOKAZATELXSTWO TEOREMY 3.4. s U^ETOM LEMMY 3.1 IZ FORMULY (3.14) POLU^AEM
ρ(x, t) = 'ρ0(ξ)e− |
0 |
Jx dt ( |
= ρ0(ξ)e−[ln Jx(ξ,t)−ln Jx(ξ,0)] |
ξ=ξ(x,t) |
= |
||
|
Rt |
˙ |
|
) |
* |
|
|
|
|
Jx |
|
|
|
|
|
|
|
|
|
|
|
||
! |
|
|
" |
ξ=ξ(x,t) |
|
|
|
|
|
|
|
|
|
||
= ρ0(ξ)Jx−1 |
(ξ, t) |
|
|
|
|
||
|
|
|
|||||
|
|
|
|
|
|
|
|
ξ=ξ(x,t)
(ZDESX MY WOSPOLXZOWALISX TEM, ^TO J(ξ, 0) = 1).
dOKAVEM TEPERX FORMULU lIUWILLQ (3.17). dLQ \TOGO NAM PONADOBITSQ SLEDU@]AQ LEMMA.
lEMMA 3.2. |
pUSTX x = X(α, t) |
– |
|
|
|
|
3 |
|
|
– PARAMETR) GLADKOE |
|||
|
ODNOPARAMETRI^ESKOE (α |
|
R |
||||||||||
SEMEJSTWO RE[ENIJ SISTEMY URAWNENIJ x˙ = v(x, t), |
x R . tOGDA PROIZWODNAQ |
||||||||||||
|
|
|
|
∂X(α, t) |
= a(α, t) R3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
∂α |
|
|
|
|||||
UDOWLETWORQET LINEJNOJ SISTEME DIFFERENCIALXNYH URAWNENIJ |
|
||||||||||||
|
|
da |
|
|
|
|
|
|
|
∂vi |
|
× |
|
(3.18) |
|
dt |
= vx X(α, t), t a(α, t), |
vx |
= |
∂xj |
3 3. |
||||||
zAME^ANIE. |TA SISTEMA, KAK IZWESTNO [ ], ESTX SISTEMA W WARIACIQH, OTWE^A@]AQ NELINEJNOMU URAWNENI@ x˙ = v(x, t) I EGO RE[ENI@ x = X(α, t).
dOKAZATELXSTWO LEMMY 3.2. pROWEDEM DOKAZATELXSTWO DLQ SLU^AQ n = 1 (x R1). pUSTX x = X(α, t) – ODNOPARAMETRI^ESKOE GLADKOE SEMEJSTWO RE[ENIJ URAWNENIQ
POLU^IM (ISPOLXZUQ TEOREMU `NGA: ∂α∂ dtd = dtd ∂α∂ ) TREBUEMOE RAWENSTWO: |
|
|
|||||||||||||||||||
x˙ = v(x, t). tOGDA, DIFFERENCIRUQ PO PARAMETRU α TOVDESTWO |
d |
X(α, t) = v X(α, t), t , |
|||||||||||||||||||
dt |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
d ∂ |
∂v |
∂X |
|
|
|
|
||||||||||||||
|
|
|
|
X(α, t) = |
|
X(α, t), t |
|
(α, t). |
|
|
|
|
|||||||||
|
dt |
∂α |
∂x |
∂α |
|
|
|
|
|||||||||||||
dOKAZATELXSTWO LEMMY 3.1. eSLI SU]ESTWUET TREHPARAMETRI^ESKOE GLADKOE SEMEJSTWO
RE[ENIJ SISTEMY x˙ = v(x, t) x = X(α1, α2, α3, t) R3, TO, PRIMENIW (3.18) DLQ KAVDOGO |
|||||||||||||||
WEKTORA ai = |
∂αi , POLU^IM, ^TO MATRICA RAZMERNOSTI 3 × 3 Y (α, t) = |
|
∂α |
|
|||||||||||
|
∂X |
|
|
|
|
|
|
|
|
∂X(α, t) |
|||||
UDOWLETWORQET LINEJNOMU URAWNENI@ |
|
R |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(3.19) |
|
|
|
Y˙ = vx |
X(α, t), t Y. |
|
|
|
|
|
|
||||
pOLOVIM TEPERX |
α = (α1, α2, α3) = ξ |
|
|
3 |
. |
oBOZNA^IM |
J(ξ, t) = det Y (ξ, t), |
S^ITAQ |
, |
^TO |
|||||
det Y (ξ, t) = 0, |
|
|
|
|
|
|
|
||||||||
0 ≤ t ≤ δ (det Y (ξ, 0) = 1), I WOSPOLXZUEMSQ PRAWILOM DIFFERENCIROWA- |
|||||||||||||||
NIQ OPREDELITELQ NEWYROVDENNOJ MATRICY: |
|
|
|
|
|
|
|||||||||
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
det Y (ξ, t) = det Y (ξ, t) tr Y˙ Y −1 |
(ξ, t). |
|
|
|
|
||||||
|
|
|
dt |
|
|
|
|
||||||||
25

oTS@DA, W SILU (3.19), NAJDEM, ^TO
dJdt = J tr vx X(ξ, t), t Y Y −1 = J tr vx X(ξ, t), t .
dLQ ZAWER[ENIQ DOKAZATELXSTWA OSTAETSQ ZAMETITX, ^TO
× |
|
|
|
|
|
|
|
|
||
|
∂vi |
|
|
|
3 |
∂vj |
|
|
|
|
tr |
|
3 3 |
= tr vx |
|
|
|
|
|
|
|
∂xj |
X(ξ, t) |
|
= j=1 |
∂xj |
|
x(ξ, t), t |
= divx v(x, t) x=X(ξ,t). |
|||
3.3.2iNTEGRIROWANIE URAWNENIJ PERENOSA
kAK UVE OTME^ALOSX WO WWEDENII, AMPLITUDA KOLEBANIJ POLQ W WOLNOWYH PROCESSAH OPREDELQETSQ W KOROTKOWOLNOWOM PRIBLIVENII IZ TAK NAZYWAEMOGO URAWNENIQ PERENOSA [ , ]. pRIWEDEM ZDESX LI[X DWA WARIANTA \TOGO URAWNENIQ: 1) DLQ AMPLITUDY ϕ(x, t) RE[ENIQ ZADA^I kO[I (W KWAZIKLASSI^ESKOM PRIBLIVENII) DLQ URAWNENIQ {REDINGERA (SM. tETRADI 3 I 4, A TAKVE STR. 50 I ZAME^ANIE NA STR. ??); 2) DLQ AMPLITUDY ψ(x, t) RE[ENIQ ZADA^I kO[I (W KOROTKOWOLNOWOM PRIBLIVENII) DLQ WOLNOWOGO URAWNENIQ (SM. tETRADI 2 I 4).
w PERWOM SLU^AE URAWNENIE PERENOSA IMEET WID |
|
|
|||||||||
(3.20) |
u(x, t), x,tϕ(x, t) + f(x, t)ϕ(x, t) = 0, |
x R3, t ≥ 0, |
|
||||||||
GDE x,t = x, |
|
, u(x, t) = |
v(x, t), 1 , PRI^EM ZADANNOE TREHMERNOE WEKTORNOE PO- |
||||||||
∂t |
|||||||||||
LE v(x, t) PRI KAVDOM t R |
|
|
|
|
|
|
S(x, t): |
||||
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
QWLQETSQ POTENCIALXNYM POLEM S POTENCIALOM |
|
|||||
(3.21) |
|
|
|
|
|
|
v(x, t) = xS(x, t), |
|
|
||
A FUNKCIQ f TAKVE OPREDELQETSQ ^EREZ POTENCIAL S(x, t) PO FORMULE |
|
||||||||||
(3.22) |
|
|
|
|
|
|
f(x, t) = |
1 |
∆S(x, t), |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
2 |
|
|
|
|
3 |
∂2 |
|
|
|
|
|
|
|
|
||
+ |
|
|
|
|
|
|
|
|
|
|
|
GDE ∆ = |
∂x 2 |
– OPERATOR lAPLASA. |
|
|
|||||||
i=1 |
i |
|
|
|
|
|
|
|
|
||
wO WTOROM SLU^AE URAWNENIE PERENOSA DLQ AMPLITUDY ψ(x, t) ZAPISYWAETSQ W WIDE (SM. tETRADX 4)
(3.23) |
∂S ∂ψ |
− a2(x, t) xS(x, t), xψ(x, t) + f(x, t)ψ(x, t) = 0, |
x R3, t ≥ 0, |
||||||
|
|
|
|||||||
∂t ∂t |
|||||||||
GDE S(x, t) I a(x, t) – GLADKIE FUNKCII, a(x, t) |
> 0, A FUNKCIQ f |
TAKVE OPREDELQETSQ |
|||||||
^EREZ S(x, t) PO FORMULE |
|
|
|
||||||
|
|
|
|
1 |
|
∂2S |
− a2(x, t)∆S . |
|
|
(3.24) |
|
|
|
f(x, t) = aS = |
|
|
|
||
|
|
|
2 |
∂t2 |
|
||||
26

pROINTEGRIRUEM URAWNENIE (3.20) PRI USLOWII, ^TO |
|
|
|||||||||||||
(C0∞ |
Rx |
– PROSTRANSTWO |
BESKONE^NO DIFFERENCIRUEMYH FINITNYH FUNKCIJ W Rx S |
||||||||||||
(3.25) 3 |
ϕ(x, t) t=0 = ϕ0(x), |
|
ϕ0 |
C0∞ Rx3 , |
Ω0 = supp ϕ0 |
3 |
|||||||||
KOMPAKTNYM NOSITELEM |
). |
oBOZNA^IM ^EREZ |
X(x0, t) |
RE[ENIE ZADA^I |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
(3.26) |
|
|
|
|
x = v(x, t), |
|
x0 |
|
Ω0, |
|
|
||||
|
|
|
|
x˙ |
t=0 |
= x0, |
|
|
|
|
|||||
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
I PUSTX QKOBIAN |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(3.27) |
Jx(x0, t) = |
DX(x0 |
, t) |
= 0, |
|
x0 Ω0, |
t [0, T ]. |
|
|||||||
|
|
|
|
||||||||||||
Dx0 |
|
|
|
||||||||||||
oBOZNA^IM ^EREZ x0 = x0(x, t) EDINSTWENNOE GLADKOE RE[ENIE SISTEMY |
|
||||||||||||||
(3.28) |
xi = Xi(x0, t), |
|
i = 1, 2, 3, |
|
x0 Ω0, |
t [0, T ]. |
|
||||||||
tEOREMA 3.5. pUSTX WYPOLNENO USLOWIE (3.27). tOGDA RE[ENIE ZADA^I (3.20),(3.25) NA OTREZKE [0, T ] OPREDELQETSQ FORMULOJ
(3.29) |
ϕ(x, t) = |
' |
|
Jx(x0, t)( |
|
|
. |
||
|
|
|
ϕ0 |
(x0) |
|
|
|
|
|
|
|
|
, |
|
|
|
|
, ^TO KWADRAT AMPLITUDY KOLE- |
|
dOKAZATELXSTWO SLEDUET IZ TEOREMY 3.4 I TOGO FAKTA |
|||||||||
|
|
|
|
|
|
x0 |
=x0 |
(x,t) |
|
BANIJ ϕ2(x, t) UDOWLETWORQET URAWNENI@ NERAZRYWNOSTI WIDA (3.3) S ZADANNYM POLEM SKOROSTEJ v(x, t), OPREDELQEMYM FORMULOJ (3.21). dEJSTWITELXNO, DLQ FUNKCII ρ(x, t) = ϕ2(x, t) W SILU URAWNENIQ (3.20) I FORMULY WEKTORNOGO ANALIZA (3.5) SLEDUET,
∂ρ
S U^ETOM WIDA f(x, t), ^TO ρ(x, t) UDOWLETWORQET URAWNENI@ ∂t +div ρv = 0, v = xS(x, t). oTS@DA I IZ FORMULY (3.15) SLEDUET UTWERVDENIE TEOREMY.
pROINTEGRIRUEM TEPERX URAWNENIE (3.23) W PREDPOLOVENII, ^TO FUNKCIQ S(x, t) UDOW-
LETWORQET URAWNENI@ |
|
|
|
|
|
∂S |
2 |
(3.30) |
|
|
− a2(x, t)( xS)2 = 0. |
∂t |
kAK IZWESTNO IZ KURSA OB]EJ FIZIKI, \TO NELINEJNOE u~p PERWOGO PORQDKA ESTX OSNOWNOE DLQ GEOMETRI^ESKOJ OPTIKI URAWNENIE – URAWNENIE \JKONALA (SM. TAKVE PUNKT ??). eGO RE[ENIE S(x, t) OPREDELQET FAZU \LEKTROMAGNITNYH KOLEBANIJ WOLNOWOGO POLQ W KOROTKOWOLNOWOM PRIBLIVENII.
sPOSOBY INTEGRIROWANIQ NELINEJNYH u~p PERWOGO PORQDKA BUDUT RASSMOTRENY NIVE W §4 I §5. zDESX VE MY PREDPOLOVIM, ^TO NAM IZWESTNY DWA GLADKIH RE[ENIQ S±(x, t)
\TOGO URAWNENIQ, KOTORYE UDOWLETWORQ@T URAWNENIQM
|
∂S± |
|
(3.31) |
|
± a(x, t)|xS±| = 0 |
∂t |
||
27
SOOTWETSTWENNO I, SLEDOWATELXNO, UDOWLETWORQ@T I URAWNENI@ (3.30).
oBOZNA^IM ^EREZ X±(x0, t) RE[ENIE ZADA^I kO[I |
|
||||||||
|
x˙ |
± = a(x, t) |
xS |
± |
(x, t), |
|
|||
|
|
| |
± |
|
|
|
|
|
|
(3.32) |
|
|
|
xS |
± |
|
|
|
|
|
x± t=0 = x0, |
x0 |
|
Ω0 |
|
Rx3 , |
|||
A ^EREZ x0 = x0±(x, t) – GLADKOE RE[ENIE SISTEMY |
|
|
|
||||||
(3.33) |
|
|
|
x = X±(x0, t) |
|
|
|||
OTNOSITELXNO PARAMETRA x0 Ω0.
tEOREMA 3.6. pUSTX WYPOLNENY SLEDU@]IE USLOWIQ:
1) QKOBIAN OTOBRAVENIQ (3.33) OTLI^EN OT NULQ: |
|
|
|
|
|||||||||||
|
Jx±(x0, t) = |
|
DX±(x0, t) |
= 0, |
|
x0 Ω0, t [0, T ]; |
|||||||||
|
|
Dx0 |
|
|
|||||||||||
2) xS(x, 0) = 0, |
|
x Ω0. |
|
|
|
|
|
|
|
|
|
|
|
||
tOGDA FUNKCIQ |
ψ(x, t)± = a(x, t)'a(x0, 0) Jx±(x0, t)( |
|
|||||||||||||
(3.34) |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
ψ0(x0) |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
OTREZKE [0, T ] |
|
QWLQETSQ GLADKIM RE[ENIEM URAWNENIQ PERENOSA (3.23) NA |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0=x0±(x,t) |
|
(3.35) |
|
∂S± ∂ψ± |
− a2 xS±, xψ± |
+ |
1 |
aS±ψ± = 0 |
|||||||||
|
|
|
|
|
|||||||||||
|
∂t ∂t |
2 |
|||||||||||||
I UDOWLETWORQET NA^ALXNOMU USLOWI@ |
|
|
|
|
|
|
|
||||||||
(3.36) |
|
|
|
|
|
ψ±|t=0 = ψ0(x), |
|
|
|
|
|||||
GDE ψ0(x) – PROIZWOLXNAQ GLADKAQ FUNKCIQ.
dOKAZATELXSTWO. pROWEDEM DOKAZATELXSTWO TEOREMY LI[X DLQ SLU^AQ, KOGDA SKOROSTX RASPROSTRANENIQ KOLEBANIJ a(x, t) POSTOQNNA (a(x, t) = a, a = const, a > 0). dEJSTWUEM, SLEDUQ PUNKTAM ALGORITMA a1.
pUSTX x = X±(x0, τ), t = t±(x0, τ) – RE[ENIE HARAKTERISTI^ESKOJ SISTEMY DLQ (3.35)
|
|
dx |
|
|
|
dS |
||
|
|
|
|
|
|
|
|
|
(3.37) |
dτ± = −a2 |
|
dx± (x, t), |
|||||
|
dt± |
= dS± |
(x, t) |
|||||
|
|
|
|
|
|
|
|
|
|
|
dτ |
|
|
dt |
|
|
|
28
S NA^ALXNYMI DANNYMI x(0) = x0 Ω0, t(0) = 0.
nA HARAKTERISTIKE Lx ,τ=0 URAWNENIE (3.35) ESTX OBYKNOWENNOE DIFFERENCIALXNOE URAW-
0
NENIE PERWOGO PORQDKA OTNOSITELXNO ± ± ± ±
ψ (x0, τ) = ψ X (x0, τ), t (x0, τ) :
(3.38)
± dψ
dτ
|
1 |
|
|
|
|
||
(x0, τ) + dψ± · |
2 |
aS± x |
= 0. |
iZ LEMMY DLQ 3.1 SISTEMY (3.37) SLEDUET, ^TO QKOBIAN |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D X±(x0, τ), t±(x |
, τ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Jx±(x0, τ) = |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D(x0, τ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
UDOWLETWORQET URAWNENI@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
dEJSTWITELXNO, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dJ |
± |
= J± aS± X±(x0, τ), t±(x0, τ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
(3.39) |
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
1 |
|
= |
− 1/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
= |
− |
|
|
|
|
|
|
|
|
|
|
|
|
J±(x0, τ) aS± = |
||||||||||||||||||||||||||
|
|
d |
|
Jx±(x0, τ) − |
|
1 |
|
|
Jx±(x0, τ) − |
|
|
|
|
1 |
|
Jx±(x0 |
, τ) |
− |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
dτ |
|
|
|
−2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dτ |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
= |
|
|
|
Jx±(x0, τ) |
− aS±. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
tEPERX PREOBRAZUEM QKOBIAN J±(x0, τ): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
D X |
±( 0 |
, τ |
) |
, t |
±( |
x |
0, τ) |
|
|
|
D X |
±( |
|
0 |
, τ |
) |
, t |
±( |
|
0 |
, τ |
) |
|
D(x0, t) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
x |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
J±(x0, τ) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
D(x0, τ) |
|
|
|
|
|
|
|
|
|
D(x0, t) |
|
|
|
|
|
D(x0, τ) |
|||||||||||||||||||||||||||||||||||
(3.40) |
|
|
|
|
|
|
|
D X±(x0, τ) |
|
|
dt± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
(x0, τ) = Jx±(x0, t) |
|
(x0, τ). |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Dx0 |
|
|
|
|
dτ |
dτ |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dOKAVEM, ^TO PROIZWODNAQ |
|
|
(x0, τ) POSTOQNNA WDOLX TRAEKTORIJ SISTEMY (3.37). w SA- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
dτ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
MOM DELE, W SILU (3.37) I URAWNENIQ (3.31) IMEEM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
dτ± |
(x0, τ) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
± |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
∂t± x=x±(x0,τ), = xS |
|
X±(x0, τ), t±(x0, τ) = P ±(x0, τ) . |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
∂S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
wY^ISLIM TEPERX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t=t±(x0,τ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
∂ |
|
|
|
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dX |
|
|
∂S± ∂t± |
|||||||||||||||
|
|
P ±(x0, τ) = |
|
xS± X±(x0, τ), t±(x0, τ) = x xS±, |
± |
|
+ |
|
|
|
. |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
∂τ |
∂τ |
dτ |
|
∂t |
∂τ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
oTS@DA, W SILU SISTEMY (3.37), NAJDEM, ^TO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
∂τ P ±(x0, τ) = x xS±, −a2 xS± |
+ |
|
|
∂t± |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
∂ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
= x |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂t± − a2 xS± 2 X±(x0, τ), t±(x0, τ) = 0. |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29

pOSKOLXKU FUNKCII S±(x, t) UDOWLETWORQ@T URAWNEI@ \JKONALA (3.30): aS± = 0. tAKIM OBRAZOM, IZMENIW NA FIKSIROWANNOJ TRAEKTORII SISTEMY (3.37)
|
dt± |
|
|
|
|
|
|||
NAJDEM, ^TO FUNKCIQ |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
MENI τ → t S U^ETOM FORMULY |
dτ |
(x0, τ) = |
|
P ±(x0) |
|
= 0 IZ FORMUL (3.39) I (3.40) |
|||
ψ±(x, t) = ' |
|
Jx±(x0, t)( |
|
, |
|||||
|
|
|
ψ0(x0) |
|
|
|
|||
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x0=x0±(x,t) |
||
GDE ψ0(x) — PROIZWOLXNAQ GLADKAQ FUNKCIQ, QWLQETSQ RE[ENIEM URAWNENIQ
PERENOSA (3.35). dLQ ZAWER[ENIQ DOKAZATELXSTWA OSTAETSQ ZAMETITX, ^TO PRI ZAMENE PARAMETRA τ NA t (t = t±(x0, τ)) FUNKCIQ X± x0, τ±(x0, t) = X±(x0, t) ESTX RE[ENIE
SISTEMY (3.33).
uPRAVNENIE. dOKAVITE FORMULU (3.35) DLQ OB]EGO SLU^AQ (a(x, t) = 0).
pRIMER. rASSMOTRIM TEPERX ODNOMERNU@ PO x WERSI@ URAWNENIQ PERENOSA (3.23) W STACIONARNOJ NEODNORODNOJ SREDE, (T. E. W TAKOJ SREDE, W KOTOROJ SKOROSTX RASPROSTRANENIQ KOLEBANIJ a(x, t) NE ZAWISIT OT WREMENI t I QWLQETSQ GLADKOJ FUNKCIEJ x: a(x, t) ≡ a(x) > 0)
(3.41) |
∂S± ∂ψ± |
− a2(x) |
∂S± ∂ψ± |
+ |
1 |
aS±ψ± = 0. |
||||
|
|
|
|
|
|
|
||||
∂t ∂t |
∂x ∂x |
2 |
||||||||
zDESX FUNKCII S±(x, t) ESTX GLADKIE RE[ENIQ URAWNENIQ LINEJNOJ BEGU]EJ WOLNY W NEODNORODNOJ SREDE SO SKOROSTX@ ±a(x) SOOTWETSTWENNO
(3.42) |
|
∂S± |
± a(x) |
∂S± |
= 0. |
|
|
|
|
|
|
||||||
|
∂t |
|
|
∂x |
|
|
|
|
|
|
|||||||
oBOZNA^IM ^EREZ X(x0, t) RE[ENIE ZADA^I kO[I |
|
|
|
|
|
|
|
|
|
||||||||
(3.43) |
|
|
|
|
x˙ = a(x), |
|
|
|
|
|
|
|
|
|
|||
|
x |
| |
t=0 = x0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(KOTOROE, O^EWIDNO, LEGKO NAHODITSQ W KWADRATURAH). tOGDA OB]EE RE[ENIE URAWNENIQ |
|||||||||||||||||
PERENOSA ( ) ZADAETSQ FORMULOJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.44) |
ψ±(x, t) = ψ0 |
|
|
|
|
|
|
|
|
|
a(x) |
t) |
|
|
, |
||
|
|
X(x, t) -a X(x, |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
GDE ψ0(x) – PROIZWOLXNAQ GLADKAQ FUNKCIQ.
uPRAVNENIE. dOKAVITE FORMULU (3.44).
30