

Конспект лекций по дисциплине Уравнения Математической Физики (УМФ)
.pdfeSLI QKOBIAN Jx = |
∂ |
|
X(ξ, t) = 0, TO DLQ URAWNENIQ x = X(ξ, t) SU]ESTWUET EDINSTWENNOE |
|||||||||||||||||||
|
||||||||||||||||||||||
∂ξ |
||||||||||||||||||||||
GLADKOE RE[ENIE ξ = ξ(x, t). i, SLEDOWATELXNO, POSLEDNEE RAWENSTWO PRIMET WID |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂u |
|
|
|
|
∂u |
|||||
|
|
|
|
|
|
|
|
|
0 = |
|
(x, t) + u(x, t) |
|
|
. |
|
|||||||
|
|
|
|
|
|
|
|
|
∂t |
∂x |
||||||||||||
kOORDINATA x NAZYWAETSQ \JLEROWOJ KOORDINATOJ SREDY. |
||||||||||||||||||||||
hARAKTERISTI^ESKAQ SISTEMA DLQ URAWNENIQ |JLERA–hOPFA IMEET WID |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x = u, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
t˙˙ = 1, |
||||||||||
T |
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
u˙ = 0 |
|
|
|
|
|
|
|
|||
( . |
|
. a(x, u) = ( |
u, |
1) |
, |
|
|
|
u, |
, |
|
|
|
|
|
|
|
|||||
|
|
|
|
b(x, u) = 0, v = ( |
1 0)). |
|
|
|
|
|
|
|||||||||||
nAJDEM DWA PERWYH INTEGRALA: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
1. u˙ = 0 u = const v1(x, t, u) ≡ u; |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
def |
||
|
2. |
|
|
= u = const |
x = ut + C x − ut = C |
v2(x, t, u) = x − ut |
. |
|||||||||||||||
|
|
dt |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
iZ UTWERVDENIQ 1.2 SLEDUET, ^TO RE[ENIE u ZADAETSQ NEQWNO URAWNENIEM F (u, x−ut) = 0, |
||||||||||||||||||||||
|JLERA–hOPFA |
|
|
|
|
|
|
u = f(x |
ut). |
||||||||||||||
GDE F (ξ1, ξ2) C(1) |
|
R2 . w PREDPOLOVENII, |
|
∂F |
||||||||||||||||||
|
^TO |
∂ξ1 |
= 0, OB]EE RE[ENIE URAWNENIQ |
|||||||||||||||||||
ZAPISYWAETSQ W WIDE |
− |
|
|
§2 zADA^A kO[I DLQ KWAZILINEJNOGO I LINEJNOGO URAWNENIJ.
mETOD HARAKTERISTIK EE RE[ENIQ
2.1pOSTANOWKA ZADA^I kO[I
DLQ KWAZILINEJNOGO URAWNENIQ (n = 2)
w DANNOM PUNKTE RASSMATRIWAETSQ URAWNENIE
(2.1) |
a1(x1, x2, u) |
∂u |
+ a2(x1, x2, u) |
∂u |
= b(x1, x2, u) |
(n = 2), |
|
|
|||||
∂x1 |
∂x2 |
|||||
ILI W \KWIWALENTNOJ ZAPISI |
|
|
|
|
||
|
a, xu R2 + (−1)b(x, u) = 0, |
a = (a1, a2)(x, u). |
||||
oB]EE RE[ENIE \TOGO URAWNENIQ STROITSQ S POMO]X@ HARAKTERISTI^ESKOJ SISTEMY
|
x˙ |
= a(x, u), |
(x, u) R3; |
v = a(x, u), b(x, u) – WEKTORNOE POLE. |
(2.2) |
u˙ |
= b(x, u), |
11

WALE Iδ = |
(−δ, δ) S NA^ALXNYMI USLOWIQMI |
|
|
|
rE[ENIE |
x = X(x0, τ, u0), u = U(x0, τ, u0) ZADA^I kO[I DLQ URAWNENIQ (2.1) NA INTER- |
|||
(2.3) |
|
x τ=0 = x0, |
|
|
|
u|τ=0 = u0 |
|
|
|
|
|
| |
|
|
ZADAET W Rx,y3 |
HARAKTERISTIKU – FAZOWU@ TRAEKTORI@ SISTEMY (2.2), PROHODQ]U@ ^EREZ |
|||
TO^KU M0(x0, u0): LM0 = (x, u): x = X(x0, τ, u0), u = U(x0, τ, u0), τ Iδ |
|
(RIS. 2.1). |
||
pOSTAWIM DLQ URAWNENIQ (2.1) ZADA^U kO[I, ISPOLXZUQ ANALOGI@ S KURSOM odu.
rASSMOTRIM ZADA^U kO[I S NA^ALXNYM USLOWIEM u |
x |
|
= u0 DLQ odu u |
= f(x, u), |
|
GDE x R1, f(x, u) C∞ Rx,u2 . |
| |
|
0 |
|
|
rE[ENIE \TOJ ZADA^I u = u(x, x0, u0), GDE x Iδ, OPREDELQET NA PLOSKOSTI Rx,u2 |
INTEG- |
||||||
RALXNU@ KRIWU@ SM0 = (x, u): u = u(x, x0, u0), x Iδ , |
M0 = M0(x0, u0), KOTORAQ |
||||||
W KAVDOJ SWOEJ TO^KE KASAETSQ WEKTORNOGO POLQ v(x, u) = |
1, f(x, u) |
(RIS. 2.2). iNY- |
|||||
MI SLOWAMI |
|
INTEGRALXNAQ KRIWAQ S |
|
|
|
|
|
|
|
|
OPREDELQETSQ PAROJ |
||||
|
, |
|
M0 W PARAMETRI^ESKOJ FORME |
|
|
|
|
FUNKCIJ u(τ) I x(τ), UDOWLETWORQ@]IH SISTEME URAWNENIJ |
|
|
|
|
|||
|
|
x˙ = 1, |
|
|
|
|
|
|
|
u˙ = f(x, u) |
(ZDESX x˙ = dτdx , u˙ = dτdu ). |
|
|
|
|
pERENESEM \TU POSTANOWKU ZADA^I kO[I NA URAWNENIE (2.1). pROINTERPRETIRUEM RE-
[ENIE URAWNENIQ (2.1) u = (x1, x2) SLEDU@]IM OBRAZOM. |
|
|
|
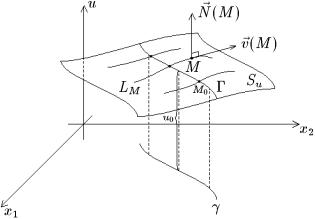
oPREDELIM W Rx,y3 |
MNOVESTWO TO^EK Su = (x, u) R3: u = u(x1, x2) |
. |TI TO^KI OB- |
|
RAZU@T GLADKU@ DWUMERNU@ POWERHNOSTX W TREHMERNOM |
, |
|u| = 0. |
|
PROSTRANSTWE ESLI
|TU POWERHNOSTX NAZYWA@T INTEGRALXNOJ POWERHNOSTX@, OTWE^A@]EJ RE[ENI@ u(x) URAWNENIQ (2.1).
12
pROWEDEM TEPERX W ZADA^E kO[I DLQ OBYKNOWENNOGO DIFFERENCIALXNOGO URAWNENIQ SLEDU@]U@ ZAMENU PEREMENNYH :
x0 u0 = u(x0) M0(x0, u0)
SM0
−→γ, |
γ – GLADKAQ KRIWAQ W Rx2 ; |
|
|
|
−→u0 = u|γ, u0 – GLADKAQ FUNKCIQ NA KRIWOJ γ; |
|
|||
−→Γ = |
(x, u) R |
: x γ, u|γ = u0 , |
Γ – W TREHMERNOM |
3 |
|
3 |
|
GLADKAQ KRIWAQ |
|
|
|
|
|
|
PROSTRANSTWE Rx,u;
−→Su, Su – INTEGRALXNAQ POWERHNOSTX.
uTO^NIM PONQTIE INTEGRALXNOJ POWERHNOSTI, ISHODQ IZ SLEDU@]EGO GEOMETRI^ES-
KOGO SMYSLA URAWNENIQ (2.1) (RIS. 2.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
dLQ KAVDOJ TO^KI M Su WY^ISLIM |
WEKTOR NORMALI |
|
|
|
|
|
|
|
xu(M), −1 . |
||||||||||
|
3 |
|
|
|
|
K NEJ: N(M) = |
|||||||||||||
KASA@]IJSQ HARAKTERISTIKI: v = a(x, u), b(x, u) , v(M) = (a, b)(M). |
|
|
, A WEKTOR, |
||||||||||||||||
uRAWNENIE POWERHNOSTI S |
u |
W PROSTRANSTWE R |
x,y: |
|
( |
x, u |
): |
− |
u |
+ |
u |
x |
, x |
2) |
= 0 |
||||
|
|
|
|
|
|
|
( |
1 |
|
|
|
||||||||
tOGDA URAWNENIE (2.1) OZNA^AET, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
||||
|
|
|
^TO WEKTOR NORMALI K INTEGRALXNOJ POWERHNOSTI W KAV |
|
|||||||||||||||
DOJ EE TO^KE ORTOGONALEN HARAKTERISTI^ESKOMU NAPRAWLENI@ W \TOJ TO^KE, ZADAWAEMOMU |
|||||||||||||||||||
WEKTOROM v(M): N(M), v(M) |
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
wYWOD. w KAVDOJ TO^KE INTEGRALXNOJ POWERHNOSTI WEKTORNOE POLE HARAKTERISTI^ESKOJ SISTEMY (2.2) LEVIT W KASATELXNOJ PLOSKOSTI K \TOJ INTEGRALXNOJ POWERHNOSTI. dRUGIMI SLOWAMI, INTEGRALXNAQ POWERHNOSTX RASSLAIWAETSQ NA HARAKTERISTIKI. a IMENNO, SPRAWEDLIWO SLEDU@]EE UTWERVDENIE.
uTWERVDENIE. eSLI M0 Su I LM0 – HARAKTERISTIKA, PROHODQ]AQ ^EREZ M0, TO \TA HARAKTERISTIKA CELIKOM LEVIT NA POWERHNOSTI Su.
oTS@DA PRIHODIM K SLEDU@]EJ POSTANOWKE ZADA^I kO[I DLQ URAWNENIQ (2.1): PROWES-
TI ^EREZ ZADANNU@ W R3x,u KRIWU@ Γ, OPREDELQEMU@ NA^ALXNYMI DANNYMI, INTEGRALXNU@ POWERHNOSTX Su, SODERVA]U@ \TU KRIWU@ Γ (RIS. 2.3).
13
iZ UTWERVDENIQ TAKVE SLEDUET GEOMETRI^ESKIJ ALGORITM RE[ENIQ \TOJ ZADA^I:
NADO WYPUSTITX IZ TO^EK M0 Γ HARAKTERISTIKI LM0 I ZATEM WZQTX IH OB_EDINENIE. pOLU^ENNAQ TAKIM OBRAZOM POWERHNOSTX, SOTKANNAQ IZ HARAKTERISTI^ESKIH KRIWYH,
I ESTX ISKOMAQ INTEGRALXNAQ POWERHNOSTX.
2.2aLGORITM a1 RE[ENIQ ZADA^I kO[I DLQ KWAZILINEJNOGO URAWNENIQ (n = 2)
pUSTX DANO URAWNENIE (2.1) I GLADKAQ KRIWAQ |
|
|
|
0 |
ξ |
|||||
pUSTX ZADANA GLADKAQ FUNKCIQ u0(ξ) NA KRIWOJ γ: |
|
|
||||||||
|
γ = (x1, x2): x1 = X01 |
(ξ), x2 |
= X0 |
2(ξ), ξ |
|
I |
|
R1 . |
||
(2.4) |
|
|
u|γ = u0(ξ), |
ξ I0. |
|
|
|
|
||
tREBUETSQ RE[ITX ZADA^U kO[I (2.1),(2.4). |
|
|
|
|
|
|
||||
pRIWEDEM SLEDU@]IJ ALGORITM RE[ENIQ \TOJ ZADA^I. |
|
|
|
|
||||||
1◦. wYPISATX PO WIDU URAWNENIQ (2.1) SISTEMU HARAKTERISTIK |
|
|
||||||||
|
|
dx |
|
x R2, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(2.5) |
dτ |
= a(x, u), |
a = (a1, a2), |
|
||||||
|
|
du |
= b(x, u). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2◦. pOSTAWITX DLQ SISTEMY (2.5) ZADA^U kO[I S NA^ALXNYMI USLOWIQMI NA KRIWOJ Γ
(2.6) x|τ=0 = X0(ξ), X0(ξ) = X01(ξ), X02(ξ) , u|τ=0 = u0(ξ),
3◦. rE[ITX ZADA^U (2.5)–(2.6), |
T. E. POSTROITX SEMEJSTWO HARAKTERISTIK Lξ, ξ |
|
I0, |
||||||||||||||
SISTEMY (2.5): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(2.7) |
x = X(ξ, τ), |
ξ |
|
I |
, τ |
|
I |
|
= |
− |
δ(ξ), δ(ξ) , δ(ξ) > 0, |
|
|
||||
(2.8) |
u = U(ξ, τ). |
|
|
0 |
|
|
|
ξ |
|
|
|
|
|
|
|
||
fORMULY (2.7)–(2.8) ZADA@T GLADKU@ DWUMERNU@ POWERHNOSTX S W PROSTRANSTWE Rx,u3 |
|||||||||||||||||
W PARAMETRI^ESKOJ FORME, ESLI RANG MATRICY |
|
∂U |
|
∂U |
RAWEN 2. |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂X |
|
∂X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ξ |
|
∂τ |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
∂ξ |
|
∂τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4◦. rAZRE[ITX SISTEMU (2.7) OTNOSITELXNO PARAMETROW τ I ξ:
ξ = ξ(x1, x2),
(2.9)
τ = τ(x1, x2).
14
|TO WOZMOVNO PRI WYPOLNENII USLOWIQ
(2.10) |
J(ξ, τ) = |
DX(ξ, τ) |
= 0, |
ξ I0, τ Iξ, |
||
|
|
|||||
D(ξ, τ) |
|
|||||
GDE J(ξ, τ) |
— QKOBIAN OTOBRAVENIQ |
(ξ, τ) |
−→(x1, x2), ZADAWAEMOGO SOOTNO[ENI- |
|||
EM (2.7). |
|
|
|
|
|
|
5◦. oPREDELITX FUNKCI@ |
|
|
|
|
||
(2.11) |
|
|
|
|
ξ=ξ(x ,x2),. |
|
u = u(x1, x2) = U(ξ, τ) |
||||||
|
|
|
|
|
τ=τ(x11,x2) |
|
uTWERVDENIE. eSLI FUNKCIQ (2.11) ODIN RAZ DIFFERENCIRUEMA PO x = (x1, x2), TO ONA QWLQETSQ RE[ENIEM ZADA^I kO[I (2.1)–(2.4).
tREBUETSQ DOKAZATX, ^TO POWERHNOSTX S, PARAMETRI^ESKI ZADANNAQ SOOTNO[ENIQMI (2.7)–(2.8), ESTX INTEGRALXNAQ POWERHNOSTX S = Su, SODERVA]AQ ZADANNU@ KRIWU@ Γ.
dOKAZATELXSTWO. w PROIZWOLXNOJ TO^KE M S S KOORDINATAMI (x, u), GDE x I u OPRE- DELQ@TSQ SOOTNO[ENIQMI (2.7) I (2.8), WY^ISLIM
a(x, u), xu(x) |
(x,u) S |
|
a X(ξ, τ), U(ξ, τ) , xU |
|
|
|
(2.5) |
|
|||||||||
= |
X(ξ, τ) = |
(2.5) |
|||||||||||||||
(2.5) |
|
d |
|
|
|
|
|
|
d |
|
|
|
(2.11) |
d |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||
= |
|
|
X(ξ, |
τ), |
|
xU X(ξ, τ) = |
|
|
u X(ξ, τ) |
|
= |
|
U(ξ, τ) |
= |
|||
|
|
|
|
|
|
|
|||||||||||
(2.5) |
dτ |
|
|
|
|
|
|
dτ |
|
|
|
dτ |
|
|
|||
= |
b X(ξ, τ), U(ξ, τ) = b(x, u) (x,u) S. |
|
|
|
|
|
|
||||||||||
pOSLEDNEE RAWENSTWO OZNA^AET, ^TO FUNKCIQ |
(2.11) |
UDOWLETWORQET URAWNENI@ (2.1) W |
|||||||||||||||
PROIZWOLXNOJ TO^KE x IZ OKRESTNOSTI KRIWOJ γ. pRI^EM, W SILU FORMUL (2.6)–(2.11) u(x) x γ = U(ξ, 0) = u0(ξ). 
uPRAVNENIE. pUSTX WYPOLNENY USLOWIQ UTWERVDENIQ. dOKAVITE, ^TO FUNKCIQ (2.11) QWLQETSQ EDINSTWENNYM RE[ENIEM ZADA^I kO[I (2.1),(2.4).
2.3iNTEGRIROWANIE ZADA^I kO[I DLQ LINEJNOGO URAWNENIQ OB]EGO WIDA (n = 2). aLGORITM a2
w DANNOM PUNKTE RASSMATRIWAETSQ URAWNENIE
(2.12) |
a1(x1, x2) |
∂u |
+ a2(x1, x2) |
∂u |
+ b(x)u = f(x) |
|||||
|
|
|
||||||||
∂x1 |
∂x2 |
|||||||||
S NA^ALXNYM USLOWIEM |
|
|
|
|
|
|
|
|||
(2.13) |
u|γ = u0(ξ), |
|
|
|
|
|
|
|
||
STRANSTWE R2, u0(ξ) |
1– ZADANNAQ GLADKAQ FUNKCIQ. |
|
ξ |
|||||||
GDE γ = (x1, x2): x |
= X01(ξ), x2 |
= X02(ξ), |
ξ |
|
I0 |
|
R1 |
– GLADKAQ KRIWAQ W PRO- |
||
15
aLGORITM a2 RE[ENIQ ZADA^I kO[I
DLQ LINEJNOGO URAWNENIQ OB]EGO WIDA (n = 2)
1◦. wYPISATX SISTEMU HARAKTERISTIK DLQ URAWNENIQ (2.12):
(2.14) |
|
|
|
dx |
|
|
|
x R2, a = (a1, a2). |
|
|
|
|||||||
|
|
|
|
|
= a(x), |
|
|
|
|
|||||||||
|
|
|
dτ |
|
|
|
|
|||||||||||
2◦. pOSTAWITX DLQ (2.14) NA^ALXNYE USLOWIQ NA KRIWOJ γ: |
|
|
|
|
|
|||||||||||||
(2.15) |
x|τ=0 = X0(ξ), |
|
|
X0(ξ) = X01(ξ), X02(ξ) , |
ξ I0. |
|
|
|||||||||||
3◦. rE[ITX ZADA^U (2.14)–(2.15), T. E. POSTROITX SEMEJSTWO HARAKTERISTIK lξ, ξ |
|
I0: |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.16) |
|
|
|
x = X(ξ, τ), |
x R2, |
|
|
|
|
|
|
|
||||||
|
|
|
|
lξ = (x1, x2): x = X(ξ, τ), τ Iξ . |
|
|
|
|||||||||||
4◦. wYPISATX URAWNENIE (WDOLX HARAKTERISTIKI) |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
du˜(ξ, τ) |
˜ |
|
|
|
|
|
|
|
|
|
|||
(2.17) |
|
|
|
|
|
|
|
+ b(ξ, τ)˜u(ξ, τ) = f(ξ, τ), |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
lξ |
|
|
|
|
dτ |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
˜ |
|
|
|
||||
GDE u˜(ξ, τ) = |
u(x1, x2) lξ = |
|
|
|
|
|
|
|
|
b(x) lξ = b(x1, x2) lξ, |
||||||||
u X1(ξ, τ), X2(ξ, τ) , b(ξ, τ) = |
||||||||||||||||||
˜ |
|
POSTAWITX DLQ NEGO ZADA^U kO[I |
: |
|
|
|
||||||||||||
f(ξ, τ) = f(x1, x2) , I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
5◦. rAZRE[ITX (2.16) OTNOSITELXNO τ I ξ |
|
|
|
|
|
|
|
|
||||||||||
(2.18) |
|
|
|
|
|
|
u˜(ξ, τ) τ=0 |
= u0(ξ). |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
ξ = ξ(x1, x2), |
|
|
|
|
|
|
|
||
(2.19) |
|
|
|
|
|
|
|
τ = τ(x1, x2) |
|
|
|
|
|
|
|
|||
W PREDPOLOVENII, ^TO QKOBIAN |
|
|
|
|
|
|
|
|
|
|
||||||||
(2.20) |
|
J(ξ, τ) = |
DX(ξ, τ) |
= 0, |
τ Iξ, |
|
ξ I0. |
|
|
|||||||||
|
|
|
|
|
||||||||||||||
|
D(ξ, τ) |
|
|
|
||||||||||||||
6◦. oPREDELITX FUNKCI@ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(2.21) |
|
|
|
|
|
|
|
|
|
def |
|
|
),, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
u = u(x1, x2) = u˜(ξ, τ) |
ξ=ξ(x ,x |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
τ=τ(x11,x22) |
|
|
|
||||
GDE u˜(ξ, τ) – RE[ENIE ZADA^I (2.17)–(2.18).
uTWERVDENIE. eSLI FUNKCIQ u(x) SU]ESTWUET I ODIN RAZ DIFFERENCIRUEMA, TO ONA QWLQETSQ RE[ENIEM ZADA^I kO[I (2.12)–(2.13).
16
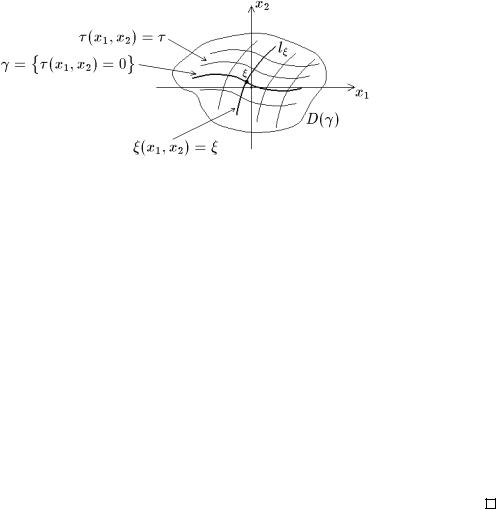
dOKAZATELXSTWO. fORMULA (2.16) PRI WYPOLNENII USLOWIQ (2.20) W NEKOTOROJ OKREST- NOSTI D(γ) KRIWOJ γ ZADAET SPECIALXNU@ ZAMENU KOORDINAT: (x1, x2) ←→ (ξ, τ). oDNA IZ KOORDINATNYH LINIJ \TOJ SISTEMY KOORDINAT, A IMENNO ξ = ξ(x1, x2) = const QWLQETSQ HARAKTERISTIKOJ URAWNENIQ (2.12) (RIS. 2.4).
~EREZ KAVDU@ TO^KU M D(γ) PROHODIT EDINSTWENNAQ HARAKTERISTIKA lξ I, BOLEE TOGO, SU]ESTWUET EDINSTWENNOE ZNA^ENIE τ TAKOE, ^TO HARAKTERISTIKA lξ W MOMENT τ POPADAET W TO^KU M S KOORDINATAMI (ξ, τ).
rASSMOTRIM FUNKCI@ (2.21). wOSPOLXZUEMSQ TOVDESTWOM
Lˆau lξ |
= dτ (u|lξ) = dτ u˜(ξ, τ) |
|||
|
|
d |
|
d |
(SM. RAWENSTWO (1.8)). tOGDA NA HARAKTERISTIKE |
lξ W TO^KE M URAWNENIE (2.12) PRINI- |
|||
MAET WID (2.17). oTS@DA, W SILU PROZWOLXNOSTI WYBORA TO^KI M D(γ), SLEDUET, ^TO
FUNKCIQ (2.21) UDOWLETWORQET URAWNENI@ (2.12) W OBLASTI D(γ). pRI \TOM, W SILU FOR-
MUL (2.15), (2.16) I (2.18)–(2.21), NA KRIWOJ γ IMEEM u(x) x γ = u˜(ξ, τ) τ=0 = u0(ξ).
pUSTX WSE KO\FFICIENTY W URAWNENII (2.12) BESKONE^NOE ^ISLO RAZ DIFFERENCIRUEMY. wOZNIKAET WOPROS: WSEGDA LI W \TOM SLU^AE ZADA^A kO[I IMEET RE[ENIE I ESLI DA, TO EDINSTWENNOE LI ONO? sLEDU@]IE NIVE PRIMERY POKAZYWA@T, ^TO ZADA^A kO- [I (2.12)–(2.13) NE WSEGDA IMEET RE[ENIE, A ESLI I IMEET, TO ONO, WOOB]E GOWORQ, NE EDINSTWENNO. pRI^INA \TOGO KROETSQ W POWEDENII HARAKTERISTI^ESKIH KRIWYH SISTEMY (2.14) W OKRESTNOSTI ZADANNOJ KRIWOJ γ.
pRIMER 2.1. rASSMOTRIM ZADA^U kO[I DLQ LINEJNOGO URAWNENIQ BEGU]EJ WOLNY:
|
|
|
|
|
|
|
|
ut |
γ = 1,x |
|
|
|
R1, |
|
|
|||
|
|
|
|
|
|
|
|
|
u |
|
+ au |
= 0, |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
GDE f C |
|
|
(R), I, |
|
|
|
, u|γ = f(x−at) x−at=0 = f(0) = 1. oTS@DA SLEDUET, |
|
|
|||||||||
GDE γ |
|
= |
|
(x, t): x − at |
= 0 |
. oB]EE RE[ENIE URAWNENIQ IMEET WID u = f(x − at), |
||||||||||||
WSE RE[ENIQ ZADA^I kO[I OPREDELQ@TSQ FORMULOJ |
u(x, t) = f(x −at), GDE f(ξ) C(1)(R) |
|||||||||||||||||
TAKAQ |
|
^TO |
|
|
|
w DANNOM PRIMERE KRIWAQ |
SAMA QWLQETSQ HARAKTERISTIKOJ SISTE |
|
||||||||||
|
|
|
(1) |
|
SLEDOWATELXNO |
|
|
|
|
|
|
|
^TO |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
, |
|
|
f(0) = 1. |
|
|
|
|
|
|
γ |
|
|
|
|
- |
||
MY (2.14).
17

pRIMER 2.2. rASSMOTRIM ZADA^U kO[I
x∂u − y ∂u = 0, ∂y ∂x
u|x=1 = u0(y),
GDE γ = (x, y): x = 1 . fAZOWYE TRAEKTORII HARAKTERISTI^ESKOJ SISTEMY
x˙ = −y, y˙ = x
QWLQ@TSQ OKRUVNOSTQMI: x2 + y2 = c, c > 0 (RIS. 2.5). i, SLEDOWATELXNO, OB]EE RE[E- |
|
= F (1 + y2) = u0(y). oTS@DA SLEDUET, ^TO ESLI FUNKCIQ u0(y) NE QWLQETSQ ^ETNOJ, TO |
|
ZADA^A kO[I NE IMEET RE[ENIQ. w \TOM PRIMERE KRIWAQ γ NE QWLQETSQ HARAKTERISTIKOJ |
, |
NIE IMEET WID u = F (x2 + y2), GDE F (ξ) C(1)(R). wY^ISLIM u|γ = F (x2 + y2) x=1 = |
|
NO W ODNOJ SWOEJ TO^KE (x = 1, y = 0) ONA KASAETSQ HARAKTERISTIKI x2 + y2 = c PRI c = 1 (RIS. 2.5).
§3 kORREKTNOSTX ALGORITMOW a1 I a2.
iNTEGRIROWANIE URAWNENIQ NERAZRYWNOSTI I URAWNENIJ PERENOSA
3.1kORREKTNOSTX ALGORITMA a2
tEOREMA 3.1. pUSTX WYPOLNENY SLEDU@]IE USLOWIQ:
1) γ = x1 = X01(ξ), x2 = X02(ξ), ξ I0 – GLADKAQ KRIWAQ (X0i(ξ) C(1)(I0), i = 1, 2,
I X01 (ξ) 2 + X02 (ξ) 2 = 0);
2)u0 – GLADKAQ FUNKCIQ;
3)WEKTORNOE POLE a(x), KO\FFICIENT b(x) I PRAWAQ ^ASTX f(x) URAWNENIQ (2.12) PRI- NADLEVAT KLASSU C(1)(D), γ D R2, I WEKTORNOE POLE a(x) = 0 PRI x D (NET STACIONARNYH TO^EK W OKRESTNOSTI KRIWOJ γ);
18
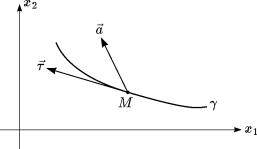
4)NI W ODNOJ TO^KE NA^ALXNOJ KRIWOJ γ WEKTORNOE POLE HARAKTERISTI^ESKOJ SISTE- MY a(x) NE KASAETSQ γ:
|
|
|
det X0 |
2 |
|
(ξ) |
a2 X0 |
(ξ) |
= 0 |
|
DLQ WSEH ξ I0, |
||||||||||||||
|
|
|
|
|
|
X0 |
1 |
|
|
(ξ) a1 |
|
X0 |
(ξ) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1KRIWOJ |
|
2 |
|
|
|
= |
|
( 0 |
) |
|
|
|
0 |
|
(ξ) |
|
( ) , – |
|
KASATELXNYJ WEKTOR K |
||||
TOR K |
|
γ W |
TO^KE ξ, |
|
|
X 1 |
|
|
(ξ), X |
2 |
= τ(M) – |
|
|||||||||||||
GDE |
a |
X0(ξ) , a |
|
X0(ξ) |
|
|
|
|
a M , M = |
x = X |
0 |
ξ |
HARAKTERISTI^ESKIJ WEK- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
KRIWOJ γ W TO^KE ξ (RIS. 3.1).
tOGDA ALGORITM a2 PO FORMULE (2.21) OPREDELQET ODIN RAZ DIFFERENCIRUEMU@ FUNKCI@ u(x1, x2) W NEKOTOROJ OKRESTNOSTI
Vδ(γ) = (x1, x2): x1 = X1(ξ, τ), x2 = X2(ξ, τ), ξ I0, τ Iξ, J(ξ, τ) = 0 ,
GDE FUNKCII Xi(ξ, τ), i = 1, 2, OPREDELENY W PUNKTE 3◦ ALGORITMA.
dOKAZATELXSTWO SLEDUET IZ
1)TEOREM SU]ESTWOWANIQ I EDINSTWENNOSTI (ZADA^I kO[I) KURSA odu (WEKTOR-FUNKCIQ X(ξ, τ) I FUNKCIQ u˜(ξ, τ) SU]ESTWU@T I ODIN RAZ DIFFERENCIRUEMY PO τ PRI KAVDOM ξ);
2)TEOREM KURSA odu O DIFFERENCIRUEMOSTI RE[ENIQ ZADA^I kO[I PO NA^ALXNYM DAN- NYM (WEKTOR-FUNKCIQ X(ξ, τ) I FUNKCIQ u˜(ξ, τ) DIFFERENCIRUEMY PO ξ);
3)TOGO FAKTA, ^TO PO TEOREME OB OBRATNOJ FUNKCII RE[ENIE SISTEMY (2.16) τ(x), ξ(x), ZADAWAEMOE SOOTNO[ENIQMI (2.19) SU]ESTWUET, EDINSTWENNO I ODIN RAZ DIFFERENCIRUEMO PO ξ, ESLI WYPOLNENO USLOWIE (2.20).
pOKAVEM, ^TO USLOWIE 4) TEOREMY OBESPE^IWAET WYPOLNENIE USLOWIQ (2.20) W NEKOTOROJ MALOJ OKRESTNOSTI KRIWOJ γ. iMEEM
|
|
|
|
∂X2 |
(ξ, 0) |
∂X2 |
(ξ, 0) |
|
|
X |
|
2 |
|
(ξ) |
a2 X |
|
(ξ) |
|||
|
|
|
∂X1 |
(ξ, 0) |
∂X1 |
(ξ, 0) |
|
|
|
0 |
|
|
|
|
0 |
|
|
4) |
||
J(ξ, τ) |
τ=0 |
= det |
∂ξ |
|
∂τ |
|
= det |
|
X |
0 |
1 |
|
(ξ) |
a1 X |
0 |
(ξ) |
|
= 0, |
||
|
|
|
|
∂ξ |
|
∂τ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
19
TAK KAK X(ξ, τ) |
τ=0 |
= X0(ξ) (W SILU FORMUL ALGORITMA a2). oTS@DA I IZ TOGO FAKTA, |
||||||||||
^TO J(ξ, τ) NEPRERYWNA |
(KAK FUNKCIQ DWUH PEREMENNYH), SLEDUET (PO IZWESTNOJ TEOREME |
|||||||||||
MATEMATI^ESKOGO ANALIZA), ^TO ONA OTLI^NA OT NULQ W NEKOTOROJ OKRESTNOSTI INTERWA- |
||||||||||||
LA I0 × {τ = 0}. |
|
|
|
|
|
|
|
|
|
|
|
|
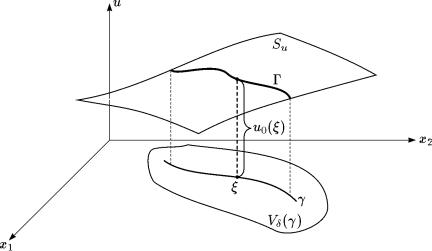
zAME^ANIE. |
s |
GEOMETRI^ESKOJ TO^KI ZRENIQ |
( |
RIS |
. 3.2)3 DANNYM kO[I (γ, u|γ) OTWE^AET |
|||||||
|
|
|
0 |
|
|
|
||||||
KRIWAQ Γ = |
(x, u): x = X |
|
(ξ), u|γ = u0(ξ), ξ I0 |
|
Rx,u, A PO ALGORITMU a2 W OKREST- |
|||||||
NOSTI Vδ(γ) |
STROITSQ |
|
INTEGRALXNAQ |
POWERHNOSTX |
Su, PROHODQ]AQ ^EREZ Γ. |
|||||||
|
|
|
|
|
||||||||
sFORMULIRUEM MNOGOMERNYJ WARIANT TEOREMY 3.1 (n ≥ 2). rASSMOTRIM OB]EE URAWNENIE
(3.1) |
aj(x) |
∂u |
+ b(x)u = f(x), |
x Rn |
|
|
|
||||
∂xj |
|||||
S NA^ALXNYM USLOWIEM |
|
|
|
|
|
(3.2) |
u|γ = u0, |
|
|
||
GDE γ = x: x = X0(ξ1, . . . , ξn−1), (ξ1, . . . , ξn−1) = ξ I0 Rnξ −1 – (n−1)-MERNAQ GLADKAQ GIPERPOWERHNOSTX W Rnx, A u0 – ZADANNAQ FUNKCIQ.
0
rank |
∂X i |
= n − 1 |
|
DLQ KAVDOGO ξ I0 |
∂ξj |
|
|||
|
|
n×(n−1) |
|
|
(INYMI SLOWAMI, KASATELXNYE WEKTORY lj = |
∂X0 |
, j = 1, . . . , (n − 1) W KAVDOJ TO^KE ξ |
||
∂ξj |
||||
GIPERPOWERHNOSTI γ LINEJNO NEZAWISIMY).
tEOREMA 3.2. pUSTX WYPOLNENY SLEDU@]IE USLOWIQ:
20