

§ 10. Основные технические и тактические параметры гидроакустических приборов
Общие сведения. Промысловые и рыбопоисковые на* учно-исследовательские суда оснащаются гидроакустическими приборами различных типов в зависимости от водоизмещения судна, его назначения и т. д. Выбор того или иного прибора зависит от его параметров, которые делятся на технические и тактические. Знание параметров позволяет грамотно использовать гидроакустические приборы на промысле, а также правильно оценивать и расшифровывать показания регистрирующих приборов с учетом конкретных условий плавания и промысла.
К основным тактическим параметрам относятся: максимальная дальность действия; мертвая зона; разрешающая способность по дальности; разрешающая способность по направлению; точность измерения расстояний и направлений; скорость обзора пространства и др.
К техническим параметрам относятся: излучаемая мощность; частота акустических волн; длительность излучаемых импульсов; ширина характеристики направленности; частота следования импульсов и др.
Максимальная дальность действия гидроакустической аппаратуры. Основным параметром гидролокатора является максимальная дальность (.Отах), которая подразделяется на энергетическую и геометрическую. Апах определяется тем максимальным расстоянием от антенны до обнаруженного объекта, при котором полезный эхо-сигнал может €ыть выделен в регистрирующих приборах на фоне помех (реверберация, шумы моря и т. д.). Изученные свойства акустических волн и среды, где они распространяются, подтверждают их большое влияние на дальность действия приборов. Следует учитывать, что объекты, от которых отражаются акустические волны, могут иметь различные размеры, акустические свойства, структуру и т. д. Зависимость энергетической дальности от технических характеристик аппаратуры и различных факторов ОП' ределяется уравнением гидролокации. В приближенном виде оно записывается так:
УИ—2ПР+ СЦ = УР + ПО,
где УИ — уровень излучения; ПР — потери при распространении; СЦ — интенсивность эхо-сигнала в 1 м от объекта; УР — уровень реверберационной помехи после усиления приемником; ПО — порог обнаружения.
Прогнозируемая дальность действия гидролокатора является приближенной, усредненной величиной. Геометрическая дальность действия гидролокатора определяется формулой
о=1/~2с7оГ (У&Г+У~К») >
где Сс = (с2—^1) (Й2—/г,) —градиент скорости звука.
29
В
характеризует
влияние на обнаружение объектов
рефракции,
которая ограничивает возможности
аппаратуры независимо
от энергетической дальности (рис. 16).
Рис.
16. Геометрическая дальность
гидролокатора:
Н\
— глубина
погружения антенны;
Ла —глубина косяка ^ Э
— угол наклона антенны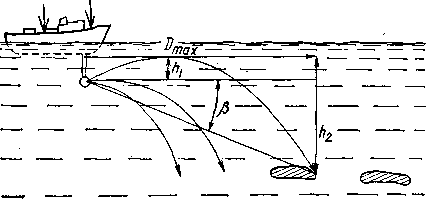
на линии одного акустиче-
~~^Ш^ШЦ^ -^Ц~ ИЦ^~ ского луча, при котором
![]()
раздельно
В
эти два объекта будут видны на регистрирующих приборах (рис. 17).
![]()
![]()
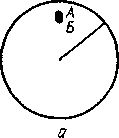
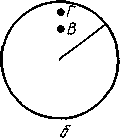
Рис. 17. Разрешающая способность по
дальности:
а — косяки видны слитно; б — косяки видны раздельно; А, Б, В, Г — косяки рыб
Разрешающая способность по дальности зависит главным образом от длины / или длительности т импульса. Теоретически два объекта будут видны раздельно, если расстояние между ними будет больше ст/2, так как в этом случае это-сигнал от 2-го объекта приходит в приемное устройство через некоторый промежуток времени после эхо-сигнала от 1-го объекта. На разрешающую способность также оказывают влияние рельеф дна, расположение рыбы в скоплении, угол направленности, бортовая качка и другие факторы, которые ее
увеличивают, т. е. в реальных условиях разрешающая способность отличается от расчетной; в общем случае она равна (0,7—0,8) ст.
30
При низкой разрешающей способности затрудняется обнаружение придонных рыб. Например, при т=1 мс реальная разрешающая способность составляет 2—3 м, поэтому рыбные скопления возле дна будут записываться слитно с дном, если не применять специальных схем «Отсечка грунта».
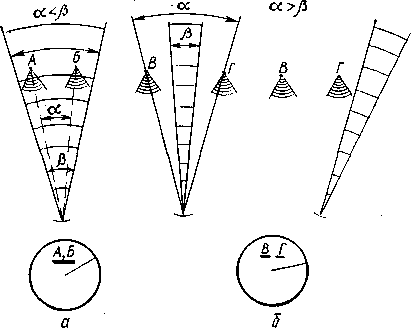
Разрешающая способность по направлению. Ею называется тот минимальный угол между двумя объектами, находящимися на одном расстоянии от антенны судна, при котором эти объекты можно различить на регистрирующих приборах раздельно. Разрешающая способность зависит от ширины диаграммы направленности, при этом угловой размер объекта должен быть во много раз меньше ширины характеристики направленности (рис. 18). При а<р объекты сливаются.
Мертвая зона. Мертвой зоной называется минимальная дальность обнаружения объекта. Ее величина зависит от длины импульса' /, которая в свою очередь определяется длительностью импульса т. Мертвая зона находится по формуле гт!п= = ст/2, однако ее величина значительно больше, так как она зависит еще от времени переходных процессов при переходе с излучения на прием, характера сканирования и т. д. и примерно равна Гтш~0,9ст.
Точность определения расстояния и направлений. Точность определения расстоянии в гидролокаторах зависит в основном от инструментальных погрешностей, возможностей регистрирующих устройств и изменений скорости звуковых волн при различных условиях их распространения. Погрешность в измерениях может достигнуть 3—5 % дальности, которая является слишком большой при прицельном разноглу-бинном тралении. Для увеличения точности измерений применяются многоперьевые самописцы с кварцевыми генераторами, регистраторы со специальными стабилизаторами временных разверток и т. д.
В гидролокаторах вертикального действия, навигационных эхолотах погрешности возникают в результате изменения скорости распространения волн, наклона дна, качки и т. д. Погрешность в результате изменения скорости акустических волн определяется формулой 6С = Я (с/с0—1), погрешность из-за наклона дна 6н = /г (зесу—1), где •у — угол наклона дна. Погрешность из-за базы между вибраторами определяется формулой бб = /1—1/г/га+1/4/2, где / — база.
Координаты промысловых объектов определяются по трем величинам: расстоянию, глубине залегания и направлению. Глубина погружения объекта при горизонтальном поиске приближенно определяется по формуле п — О&т$, где р — угол места (см. рис. 18).
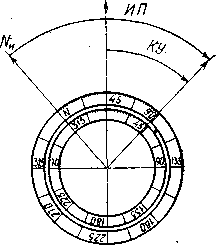
Измерение направлений производится с помощью антенн, обладающих направленными свойствами. В рыболокации для
31
|![]()
Рис. 18. Разрешающая способность по направлению:
а — косяки видны слитно; б — косяки видны раздельно
сина-приемника, синхронно связанного с сельсином-датчиком поворотного устройства антенны. По азимутальному кругу снимается КУ, а по шкале репитера — ИП на обнаруженный объект. Особенно удобно определять направления по индикатору с одновременным круговым или крупносекторным обзором.
Скорость обзора подводного пространства. Для успешного промысла необходим оперативный поиск рыбы в окружающем подводном пространстве. Поиск объектов промысла заключается в определении координат этих объектов. Поэтому в реальных условиях скорость обзора подводного пространства— это не только перемещение диаграммы направленности по горизонту с максимально возможной скоростью, но и оценка обнаруженных объектов.
Безусловно важным является возможно более быстрый обзор всего объема воды, что достигается применением электронного сканирования по горизонту.
При применении гидролокатора с одновременным обзором пространства отметки эхо-сигналов от объектов сохраняются определенное время на экране трубки, что позволяет, не изменяя скорости, продолжать поиск, при этом за то же время 32
значительно возрастает объем просматриваемого подводного пространства. Для увеличения скорости обзора подводного пространства применяют дискретный способ, заключающийся в том, что на малой скорости просматривается окружающий объем, после чего судно на максимальной скорости проходит расстояние, равное 1,5Апах (где От&* — дальность действия гидролокатора), затем вновь просматривается горизонт на малой скорости и т. д.
Нос
Излучаемая мощность. Она определяется величиной электрической мощности, подаваемой на излучающую антенну. Величина мощности ограничивается кавитацией, т. е. образованием в прилегающей к антенне жидкости пузырьков, заполненных газом. Кавитация возникает за счет местного понижения давления в жидкости во время полупериода разрежения. В полупериод наибольшего сжатия давление увеличивается и кави-тационный пузырек «захлопывается», излучая при этом ударную волну. Кавитация разрушает поверхность антенн.
Рис. 19. Определение направлений в гидролокаторе «Сарган»
Частота акустических волн. Водная среда оказывает различное действие на акустические волны разных частот. Так, например, при наличии в слоях воды значительного количества пузырьков с воздухом дальность действия гидролокаторов на частотах до 50 кГц
значительно уменьшается, а при увеличении частоты до 150— 200 кГц эти пузырьки практически не оказывают никакого вли-. яния на акустические волны. Однако при высоких частотах волн происходит значительное поглощение энергии. Так, например, коэффициент поглощения на частоте 40 кГц в 15 раз меньше коэффициента поглощения на частоте 400 кГц, поэтому применение той или иной частоты излучения зависит от назначения гидроакустической аппаратуры. Например, в навигационных эхолотах применение частот ограничивается пределами от 15 до 100 кГц. В поисковой аппаратуре, траловых зондах частоты могут быть увеличены до 200 кГц, а в лагах — до 1 мГц и более.
33
Длительность излучаемых импульсов. Она определяет мертвую зону и разрешающую способность по дальности. Чем больше длительность импульса, тем большее расстояние занимает импульс в пространстве и тем больше должно быть расстояние между объектами, чтобы отраженные от них сигналы не сливались в один общий сигнал, а поступали на вход прибора раздельно. Длительность импульса также влияет на дальность и глубину обнаружения объектов.
Заказ № 1668
Ширина характеристики н а пр а в ленно ст и. Она значительно влияет на некоторые параметры гидролокаторов и эхолотов. Узкие характеристики направленности обеспечивают концентрацию энергии в небольшой зоне, что позволяет увеличивать дальность действия при меньшей излучаемой мощности. Узкие характеристики позволяют более надежно определять границы скопления рыб, обнаруживать промысловые объекты вблизи грунта или на свалах глубин, увеличивать разрешающую способность по направлению, уменьшать влияние реверберации. В то же время они затрудняют определение глубины, поиск и удержание эхо-контакта с обнаруженными объектами при волнении на море. Сужение диаграммы требует также увеличения линейных размеров вибраторов. На судах получили распространение, различные системы стабилизации, которые значительно уменьшают влияние качки. В гидроакустических приборах применяется несколько характеристик направленности. Ширина характеристики направленности выбирается в зависимости от условий плавания и промысла.
Частота следования импульсов. Она влияет на скорость и надежность получения информации1 об объектах. С повышением частоты посылок эта информация становится более полной, что позволяет без ошибок расшифровывать записи, более точно определять параметры обнаруженных объектов промысла, определять структуру и рельеф дна, уменьшать влияние помех. В приборах частота посылок меняется в зависимости от диапазона измерений.
34
Приемные устройства гидроакустической аппаратуры характеризуются коэффициентом усиления, полосой пропускания частот, чувствительностью приемника и др.