

3.3.4. Частотные характеристики и передаточные функции параметров режима без учёта действия арв-сд
Частотные характеристики – это амплитудно-фазовые соотношения приращений параметров режима при задании гармонического возмущения на обмотку возбуждения генератора. Эти характеристики целесообразно использовать при анализе границ колебательной устойчивости и взаимного влияния каналов регулирования по различным параметрам режима и их производным. Рассмотрим ЧХ электропередачи, включающей СГ, который работает через внешнюю реактивность на шины неизменного напряжения (рис. 3.2). При изучении этих характеристик можно использовать соотношения, получаемые из решения линеаризованных уравнений Горева-Парка [5], которые применяют для исследования ПП. Не учитывая для простоты выкладок демпферные контуры и исключая составляющие, обусловленные быстрозатухающими ПП и изменением скорости вращения ротора относительно синхронной оси, запишем уравнения в виде
![]() ; (3.36)
; (3.36)
![]() ; (3.37)
; (3.37)
![]() ; (3.38)
; (3.38)
![]() . (3.39)
. (3.39)
В уравнениях (3.38), (3.39) и далее литера «р» используется как символ дифференцирования переменной во времени (не путать с литерой «Р», обозначающей активную мощность генератора).
Линеаризованные уравнения ПП электропередачи, работающей на мощную приемную систему, запишем в виде
![]() , (3.40)
, (3.40)
где
![]() ; (3.41)
; (3.41)
![]() ; (3.42)
; (3.42)
![]() . (3.43)
. (3.43)
Уравнение движения в полных единицах
. (3.44)
В
относительных единицах
![]() :
:
![]() . (3.45)
. (3.45)
Используя
статорное уравнение
![]() ,
имеем
,
имеем
![]() . (3.46)
. (3.46)
Необходимо привести уравнение (3.42) к базисным переменным. Тогда
![]() . (3.47)
. (3.47)
Поскольку
линеаризовать необходимо по
![]() ,
то
,
то
![]() ; (3.48)
; (3.48)
![]() . (3.49)
. (3.49)
Уравнение движения ротора (3.44), (3.45) примет следующий вид:
![]() .
(3.50)
.
(3.50)
В формуле
(3.50) исключим
![]() с помощью выражения
с помощью выражения
![]() . (3.51)
. (3.51)
Тогда
![]()
![]() . (3.52)
. (3.52)
Таким образом, имеем
![]() . (3.53)
. (3.53)
В
уравнении (3.53)
![]() ,
то есть
,
то есть
![]() .
Поэтому линеаризованное уравнение
принимает вид
.
Поэтому линеаризованное уравнение
принимает вид

![]() . (3.54)
. (3.54)
Исключим
из (3.43)
![]() ,
используя (3.36), и получим
,
используя (3.36), и получим
; (3.55)
![]() ; (3.56)
; (3.56)
![]() . (3.57)
. (3.57)
Тогда уравнение (3.43) примет вид
 .
(3.58)
.
(3.58)
Обозначим зависимость
![]() ; (3.59)
; (3.59)
. (3.60)
Таким образом, система двух линеаризованных уравнений с двумя неизвестными примет вид
 (3.61)
(3.61)
или
 (3.62)
(3.62)
Обозначим выражения в системе (3.62):
![]() ; (3.63)
; (3.63)
![]() ; (3.64)
; (3.64)
![]() ; (3.65)
; (3.65)
![]() . (3.66)
. (3.66)
Тогда исходную систему уравнений (3.62) можно записать в виде
 (3.67)
(3.67)
Решив
уравнение (3.67) относительно
![]() и
и
![]() ,
найдем ПФ параметров регулирования
разомкнутой системы
,
найдем ПФ параметров регулирования
разомкнутой системы
![]() и
и
![]() :
:
![]() ; (3.68)
; (3.68)
![]() . (3.69)
. (3.69)
Знаменатель выражений (3.68) и (3.69) является ХП, имеющим корни, характеризующие общие динамические свойства, в том числе и статическую устойчивость системы. Данный полином 3-го порядка, имеет одну комплексную пару корней (колебательная составляющая движения) и действительный корень (апериодическая составляющая):
![]() . (3.70)
. (3.70)
Положим,
что к обмотке возбуждения генератора
приложено гармоническое возмущение
![]() с амплитудой
с амплитудой
![]() и частотой
.
Тогда изменение переменных
и
также будет гармоническим. Заменив в
выражениях (3.68) и (3.69) оператор
дифференцирования
и частотой
.
Тогда изменение переменных
и
также будет гармоническим. Заменив в
выражениях (3.68) и (3.69) оператор
дифференцирования
![]() на
на
![]() ,
найдем ЧХ системы
,
найдем ЧХ системы
![]() и
и ![]() :
:
![]() ; (3.71)
; (3.71)
![]() . (3.72)
. (3.72)
В полной форме эти выражения имеют вид
 ;
(3.73)
;
(3.73)
 .
(3.74)
.
(3.74)
Частные производные в выражении приращения электромагнитной мощности из (3.52) определяются следующим образом:
![]() ; (3.75)
; (3.75)
![]() . (3.76)
. (3.76)
Для лучшего понимания изложенного материала ниже приведён пример исследования статической устойчивости и построения ЧХ разомкнутой системы для ВИЗ 00.
Величину
синхронизирующей мощности
определим согласно выражению (3.75):
![]() .
Поскольку
.
Поскольку
![]() ,
то можно утверждать, что система в
разомкнутом состоянии является
устойчивой.
,
то можно утверждать, что система в
разомкнутом состоянии является
устойчивой.
Определим корни ХП, численное выражение для которого получим согласно (3.70):
![]() . (3.77)
. (3.77)
Для нахождения корней полинома (3.77) воспользуемся программой “KORNI.exe”:
 .
.
Результаты решения кубичного уравнения представим в форме табл. 3.3.
Таблица 3.3
Собственные значения характеристической матрицы
Затухание, с–1 |
Частота, Гц |
–0,067 |
5,37 |
–0,240 |
|
Отметим полученные корни на комплексной плоскости (рис. 3.6).


Рис. 3.6. Расположение корней ХП на комплексной плоскости
Поскольку все три корня ХП находятся в левой полуплоскости относительно мнимой оси (рис. 3.6), т.е. имеют отрицательные вещественные части, то исследуемую систему в разомкнутом состоянии можно считать устойчивой. В то же время комплексно-сопряжённый корень находится в опасной близости к границе устойчивости. Следовательно, необходимо предусмотреть мероприятия по повышению запасов устойчивости системы.
Для
построения ЧХ разомкнутой системы по
каналу регулирования угла напряжения
статора
![]() запишем соотношение для нахождения
АФЧХ согласно (3.73):
запишем соотношение для нахождения
АФЧХ согласно (3.73):
![]() .
.
Значение
частоты
будем изменять в пределах от 0 до 10 Гц с
шагом
![]() .
Вид построенных ЧХ разомкнутой системы
по каналу регулирования
представлен на рис. 3.7, 3.8.
.
Вид построенных ЧХ разомкнутой системы
по каналу регулирования
представлен на рис. 3.7, 3.8.
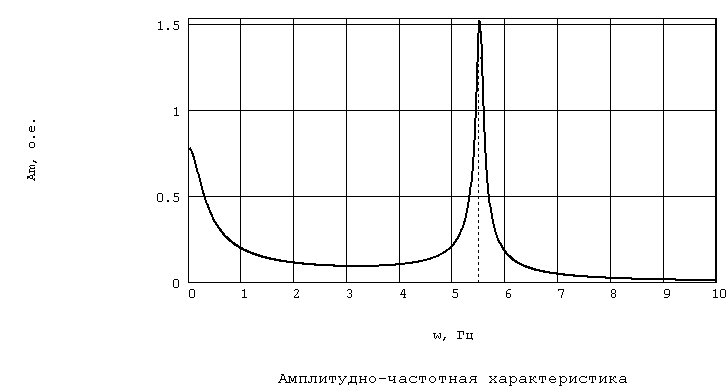

Рис. 3.7. АЧХ разомкнутой системы по каналу регулирования угла

Р ис.
3.8. ФЧХ разомкнутой системы по каналу
регулирования угла
ис.
3.8. ФЧХ разомкнутой системы по каналу
регулирования угла