И сследование
характеристик гироскопического датчика
угловой скорости
сследование
характеристик гироскопического датчика
угловой скорости
Министерство образования и науки Российской Федерации Саратовский государственный технический университет имени Ю.А. Гагарина |
|||
|
|
||
ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ |
|||
|
|
||
|
Методические указания к выполнению лабораторной работы по дисциплине “Приводы роботов” для студентов специальности 220402.65 |
|
|
|
|
||
|
Одобрено редакционно-издательским советом Саратовского государственного технического университета |
||
|
|
||
Саратов 2012 |
|||
СОДЕРЖАНИЕ
1. Краткие теоретические сведения 3
Если учесть инерционный и демпфирующий моменты, действующие на рамку, то уравнение 2 будет иметь вид : 6
2. Описание лабораторного стенда 6
3. Экспериментальное снятие характеристик ДУС 7
4. Требования безопасности труда 9
(15) 9
6. Содержание отчета 9
7. Время на выполнение задания 10
8. Рекомендуемая литература 10
Цель работы
Изучение принципа действия, конструкции, выходной характеристики и области применения датчика угловой скорости. Построение теоретической выходной характеристики датчика, построение экспериментальной выходной характеристики датчика, их сравнение между собой и выводы о причинах различия.
1. Краткие теоретические сведения
Датчик угловой скорости (ДУС) представляет собой гироскоп с двумя степенями свободы, движение которого вокруг оси подвеса рамки ограничено упругой связью. Гироскопы с двумя степенями свободы применяются при измерениях абсолютной угловой скорости вращения самолета, автомобиля, платформы или иного движущегося объекта.
Конструкция
прибора. На рамке быстро вращающегося
ротора гироскопа установлены датчик
угла поворота рамки, пружина для создания
момента и демпфер. Потенциометрический
датчик угла состоит из щётки и основания,
с намотанным проводом из токопроводящего
материала с высоким удельным сопротивлением.
При повороте рамки гироскопа на угол
![]() ,
расположенная на ней щётка перемещается
по основанию потенциометра и выходное
напряжение между щёткой и средней точкой
в режиме холостого хода можно представить
в виде
,
расположенная на ней щётка перемещается
по основанию потенциометра и выходное
напряжение между щёткой и средней точкой
в режиме холостого хода можно представить
в виде
|
(1) |
где
![]() - напряжение питания потенциометра;
-текущая
угловая скорость вращения датчика.
мах-
максимальная угловая скорость вращения
датчика (предел измерения). К-коэффициент
усиления датчика
- напряжение питания потенциометра;
-текущая
угловая скорость вращения датчика.
мах-
максимальная угловая скорость вращения
датчика (предел измерения). К-коэффициент
усиления датчика
Напряжение
![]() пропорционально угловой скорости
вращения датчика и может быть использовано
где угодно; например, в канал управления
самолётом или на вход вычислительного
устройства системы ориентации.
пропорционально угловой скорости
вращения датчика и может быть использовано
где угодно; например, в канал управления
самолётом или на вход вычислительного
устройства системы ориентации.
При вращении с угловой скоростью ротора гироскопа с собственным моментом инерции J, момент количества движения ротора H=J*, который называют кинетическим моментом гироскопа.
При вращении с
угловой скоростью
основания гироскопа с кинетическим
моментом ротора H
возникает
гироскопический момент
![]() ,
равный векторному произведению
кинетического момента гироскопа на
угловую скорость вращения его основания.
Этот гироскопический момент поворачивает
рамку с кинетическим моментом. Повороту
рамки противодействует момент сил
упругости пружины
,
равный векторному произведению
кинетического момента гироскопа на
угловую скорость вращения его основания.
Этот гироскопический момент поворачивает
рамку с кинетическим моментом. Повороту
рамки противодействует момент сил
упругости пружины
![]() .
(Полагаем, что инерционный и демпфирующий
не моменты отсутствуют.) Когда момент
пружины и гироскопический момент
сравняются, рамка остановится. При этом
возможные колебания рамки не рассматриваются
Для установившегося равновесия моментов
будем иметь
.
(Полагаем, что инерционный и демпфирующий
не моменты отсутствуют.) Когда момент
пружины и гироскопический момент
сравняются, рамка остановится. При этом
возможные колебания рамки не рассматриваются
Для установившегося равновесия моментов
будем иметь
![]() или
при sin(H)=1
или
при sin(H)=1
![]() (2)
(2)
Из выражения (2)
следует
![]() (3)
(3)
где
![]() - коэффициент жёсткости пружины;
- коэффициент жёсткости пружины;
![]() - статическая чувствительность или
передаточный коэффициент.
- статическая чувствительность или
передаточный коэффициент.
Отношение выражения
(2) к выражению (3) можно представить в
виде ![]() (4)
(4)
При умножении обеих частей равенства (4) на величину Uc/2 будем иметь выражение
![]() (5)
(5)
эквивалентное выражению (1).
т.е. напряжение на
выходе гироскопа пропорционально
измеряемой угловой скорости
![]()
|
Рис. 1. Конструкция датчика угловой скорости |
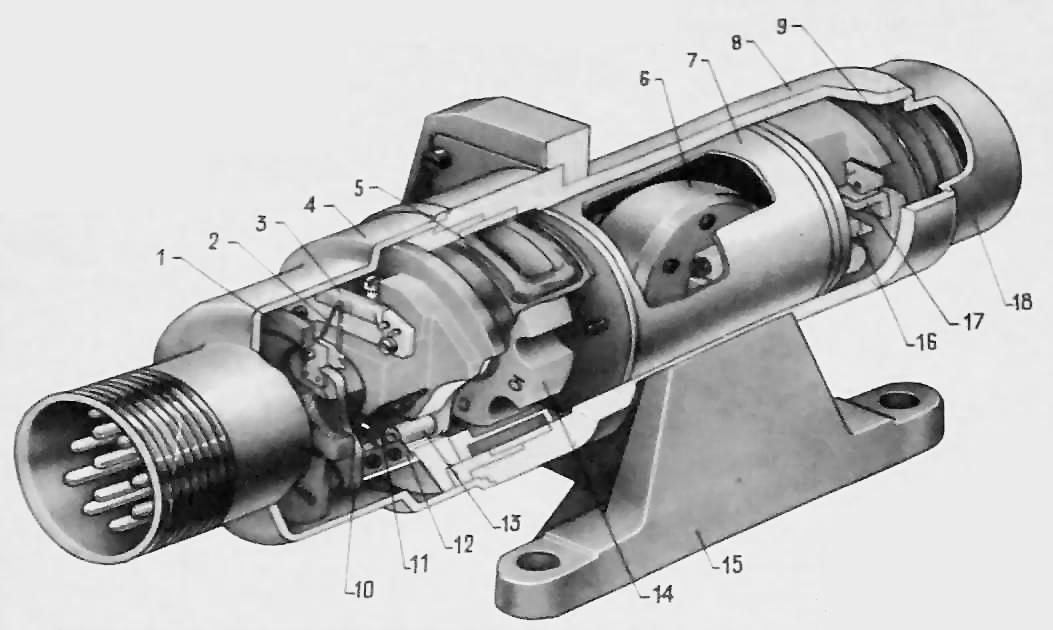
где: 1 – колодка, 2 – щетка, 3 – потенциометр, 4 – вилка с крышкой, 5 – катушка, 6 – гиромотор, 7 – гироузел, 8 – корпус, 9 – сильфон, 10 – щеткодержатель, 11 – пружина, 12 – сухарь, 13 – палец, 14 – магнит, 15 – кронштейн, 16 – лопатка ротора демпфера, 17 – лопатка статора демпфера, 18 – крышка.
|
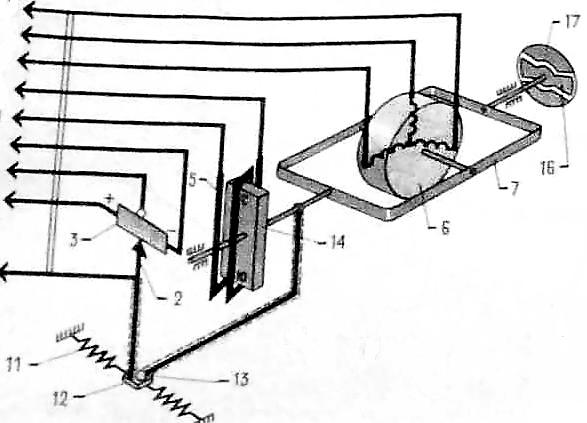
Рис. 2. Электрокинематическая схема датчика угловой скорости. |
|
|
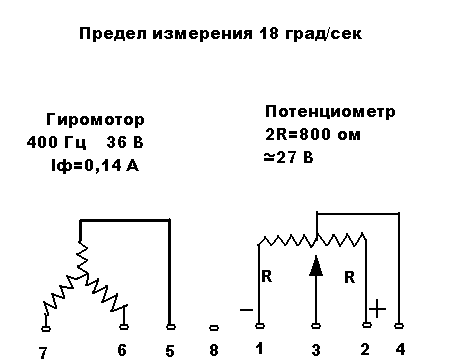
Рис. 3. Электрическая схема ДУСМ. |
Рис. 4. Внешний вид ДУСМ. |