

Теория автоматического управления.
Автоматическое регулирование (АР) – процесс поддержания заданного значения или изменения по заданной программе какой-либо физической величины при действии на систему возмущения и выполняемого без участия человека.
Объект регулирования (ОР) – техническое устройство, в котором осуществляется регулирование.
Физическая величина, подлежащая регулированию, называется регулируемой.
ОР+АР=САР
САР - система автоматического регулирования.
Генератор.
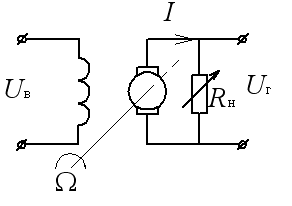
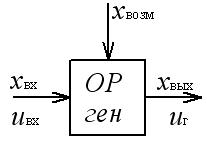
uв - напряжение на обмотке возбуждения
uг – напряжение генератора
Двигатель постоянного тока.


Под автоматическим управлением понимают создание условий, выбранных из множества возможных на основе определенной информации и направленных на поддержание или улучшение функционирования системы в соответствие с целью управления.
В качестве объектов управления ОУ могут рассматриваться отрасли, предприятия, цеха, процессы.
Можно привести следующую обобщенную структуру
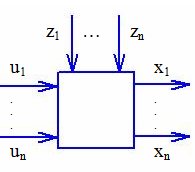
u (u1 ,…, un);- вектор управляющих воздействий
x (x1 ,…, xn);-вектор входных воздействий
z (z1 ,…, zn);-вектор возмущающих воздействий

X=A(u,z), A – оператор зависимости.
Принципы управления
Разомкнутого управления

1 – задача, задает алгебраическая функция (х0)
2 – устройство управления, на основе АУ и свойств ОР (3), вырабатывает сигнал управления u.
3 – ОР, выходная величина – х, z – возмущенное воздействие.
Принцип компенсации

![]()
Принцип обратной связи

Если х отличается от х0, то в закон управления вводится коррекция, и выходной х должен совпадать или отличаться от х0 на min.
1) положительная обратная связь (ПОС)

![]()
2) отрицательная обратная связь (ООС)

![]()
Классификация систем управления:
По уравнениям динамики:
Нелинейные
Линейные
Линейные и нелинейные системы могут быть:
1) с постоянными параметрами;
2) с переменными параметрами;
3) с распределенными параметрами;
4) с запаздыванием.
По способу передачи сигналов:
Непрерывные системы
Дискретные системы:
1)импульсные
2)цифровые
Релейные системы
По рассогласованию в установившемся режиме:
Статические
Астатические
По способу задания выходной (регулируемой) величины:
Системы стабилизации
Системы программного управления
Следящие системы
Самооптимизирующиеся системы
Терминальные системы
Если хотя бы одна из величин квантуется по времени, система импульсная.

Если по уровню – релейная система.

Если и по времени, и по уровню, то система цифровая.
Статические системы – системы, в которых выходная величина зависит от возмущений.
![]() (ошибка в установившемся режиме).
(ошибка в установившемся режиме).
Астатические
системы
– системы, в которых
![]() .
.
Система стабилизации – система, в которой выходная величина наперед задана.
Системы программного управления – выходная величина меняется по заданной программе.
Следящая система – входная величина может меняться по произвольному закону, а выходная – четко следует за ней.
Самооптимизирующиеся системы – системы, которые в процессе работы способны изменять входное возмущение, контролировать параметры системы, перенастраиваться, чтобы обеспечить требуемое управление процессом.
Терминальные системы – задачи, достижение определенных показателей в заданном месте и времени.