

5.1. Балансировка роторов гтд
В реальных роторах ГТД при их вращении всегда действуют инерционные силы и моменты от неуравновешенных масс, из-за неточности изготовления и сборки, неоднородностей: материала, упругих и остаточных деформаций деталей ротора. Эти нагрузки передаются на опоры роторов, нагружая дополнительно их подшипники, и вызывают вибрацию двигателя.
Через узлы крепления двигателя к самолету переменные по величине и направлению нагрузки передаются на самолет, вызывая вибрации и дополнительные нагрузки в элементах конструкции и оборудования, ослабляют места стыков конструкции планера и трубопроводов, дополнительный шум, а также влияют на самочувствие и здоровье пассажиров и экипажа.
В процессе работы двигателя могут возникать резонансные режимы, вызывающие дополнительные вибрационные напряжения в отдельных деталях двигателя, самолета или оборудования, что может привести к их поломке.
Для предотвращения колебаний с недопустимыми амплитудами, снижения влияния виброперегрузок на надежность и ресурс двигателя, самолета и оборудования проводится как статическая, так и динамическая балансировка роторов двигателей, как при производстве, так и при ремонтах.
Статическая балансировка
Если положить вал с тонким диском, у которого центр тяжести смещен относительно оси вала на величину е, на острые строго отгоризонтированные параллельные брусья, то момент от силы веса, относительно оси вращения, заставит диск поворачиваться относительно оси, до положения устойчивого равновесия, при котором центр тяжести располагается в наинизшей точке (рис.5.3). Такой ротор (диск) называется статически неуравновешенным.
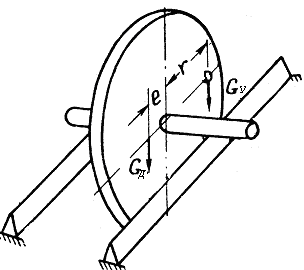
Рис.5.3 Схема статической балансировки
Для устранения дисбаланса необходимо создать равный и противоположно направленный момент путем размещения на диаметральной стороне диска груза весом Gy на расстоянии r от оси вращения.
Условие равновесия, при котором диск будет находиться в безразличном равновесии в окружном направлении, запишется
![]() (5.10)
(5.10)
Статическую балансировку проходят все вращающиеся детали двигателя. Обычно статическая балансировка осуществляется путем снятия металла со специально предусмотренных при конструировании поверхностей деталей. Допустимое значение дисбаланса указывается в конструкторской документации.
Динамическая балансировка
Рассмотрим ротор установленный в опорах и нагруженный неуравновешенной силой Р и моментом М (рис.5.4). При вращении ротора неуравновешенная сила Р и момент М изменяются пропорционально квадрату угловой скорости величины дисбаланса . Такая неуравновешенность называется динамической и для уравновешивания таких роторов проводится динамическая балансировка.
Уравновешивание осуществляется двумя грузами, расположенными в двух произвольно выбранных плоскостях, называемых плоскостями приведения.
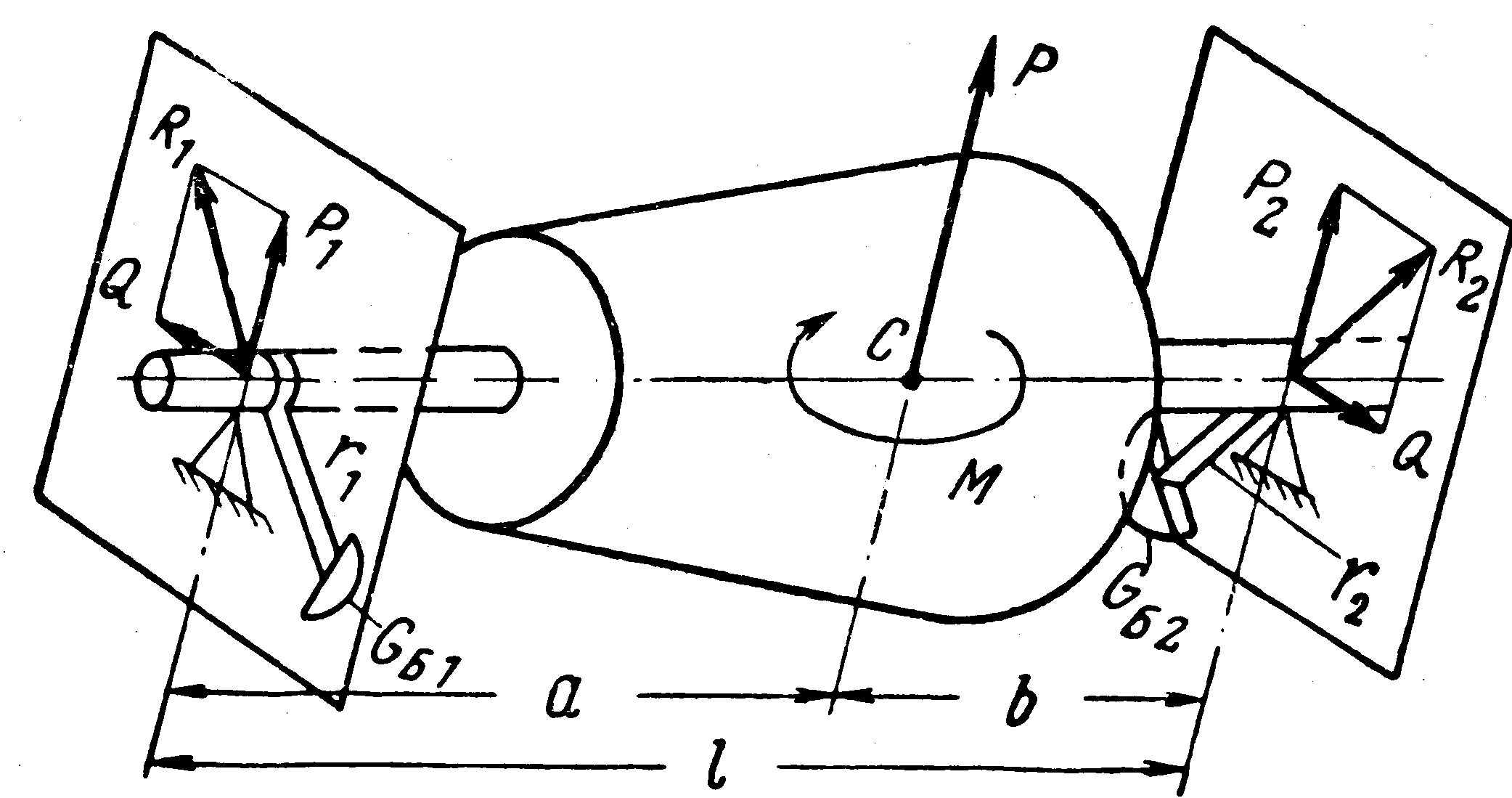
Рис. 5.4, Схема динамической неуравновешенности роторов
Возьмем за плоскости приведения плоскости, проходящие через подшипники и перпендикулярные оси вала. Неуравновешенную силу Р можно заменить двумя составляющими силами
![]() и
и
![]() ,
(5.11)
,
(5.11)
а момент М - парой сил Q , действующих в плоскостях приведения:
![]() (5.12)
(5.12)
Равнодействующие сил и в плоскостях приведения равны суммам векторов соответствующих сил
![]() (5.13)
(5.13)
Таким
образом, неуравновешенная сила
и момент
можно заменить эквивалентными силами
![]() и
и
![]() ,
действующими в плоскостях приведения
и изменяющимися пропорционально
квадрату угловой скорости вращения
ротора
.
,
действующими в плоскостях приведения
и изменяющимися пропорционально
квадрату угловой скорости вращения
ротора
.
Для статической и динамической балансировки ротора необходимо в плоскостях приведения диаметрально противоположно силам и , разместить балансировочные грузы так, чтобы выполнялись условия
 (5.14)
(5.14)
где
![]() и
и
![]() -
радиусы крепления балансировочных
грузов;
-
радиусы крепления балансировочных
грузов;
![]() и
и
![]() - динамический дисбаланс в данной
плоскости. Также возможна динамическая
балансировка путем снятия металла в
плоскостях приведения в направлении
действия сил R.
- динамический дисбаланс в данной
плоскости. Также возможна динамическая
балансировка путем снятия металла в
плоскостях приведения в направлении
действия сил R.
Для
ротора работающего без прогиба вала
![]() (ротор жесткий) потребная масса
балансировочного груза не зависит от
угловой скорости вращения, так как
уравновешиваемая сила R
и центробежная
сила от балансировочных грузов находятся
в одинаковой, функциональной зависимости
от неё.
(ротор жесткий) потребная масса
балансировочного груза не зависит от
угловой скорости вращения, так как
уравновешиваемая сила R
и центробежная
сила от балансировочных грузов находятся
в одинаковой, функциональной зависимости
от неё.
Динамическая балансировка неокончательно обработанных роторных деталей (отсутствие полировки, упрочняющих и антикоррозионных покрытий и т.д.) обычно проводится за счет снятия металла в специально предусмотренных конструктором местах, желательно на максимальном радиусе.
Окончательная балансировка ротора проводится подбором по массе и соответствующим размещением рабочих лопаток, ввертыванием балансировочных винтов, высверливанием фиксирующих штифтов, ввертыванием балансировочных грузов и другие способы, обеспечивающие динамическую балансировку и не нарушающие прочностные качества ротора и газодинамические параметры двигателя.
Для повышения ресурса двигателя, снижения уровня вибраций необходимо снижать значение остаточного дисбаланса.
Однозначно, чем меньше размеры двигателя и чем меньше скорость вращения ротора, тем большее значение допустимого дисбаланса для двигателя.
Нагрузка на подшипник от неуравновешенных масс подсчитывается по формуле
![]() (5.15)
(5.15)
Динамическая балансировка ротора с учетом прогиба ротора отличается от рассмотренной выше методики, так как масса балансировочных грузов зависит от скорости вращения ротора. Поэтому гибкие ротора, обычно балансируются, для одной угловой скорости вращения ротора.
Для гибкого ротора неуравновешенная центробежная сила определяется по формуле
![]() (5.16)
(5.16)
Влияние неуравновешенности ротора с учетом прогиба вала при изменении угловой скорости вращения снижают путем снижения интенсивности прогиба. С этой целью осуществляют демпфирование колебаний при критических режимах, установкой балансировочных грузов в плоскости действия неуравновешенных центробежных сил и т.д.