

2. Адаптивное управление точностью обработки по размерам динамической и статической настройки
В отличие от ранее
рассмотреных АС, которые являются
одноконтурными, данные АС относятся к
двухконтурным и реализуют комбинированный
способ управления точностью обработки.
В этих АС имеет место комбинация описанных
выше двух способов, что является более
эффективным, но и более сложным в
конструктивном исполнении. Например,
при больших колебаниях припуска и
твердости материала заготовки внесение
поправки посредствам изменения подачи
(управление размером динамической
настройки Ад)
может привести к колебаниям шероховатости
обработанной поверхности и выходу ее
за допустимые пределы. Во избежание
этого уменьшают диапазон изменения
подачи. Чтобы сохранить при этом точность
обработки, вводят дополнительное
управление размером статической
настройки Ас.
Это устраняет часть отклонения
![]() `Ад,
нескомпенсированную из-за ограничения
диапазона изменения подачи.
`Ад,
нескомпенсированную из-за ограничения
диапазона изменения подачи.
Структурная схема АС, управляющей размерами статической и динамической настройки, приведена на рис. 14.3.
Рис. 14.3. Структурная
схема двухконтурной АС, управляющей
размерами
статической и динамической настройки.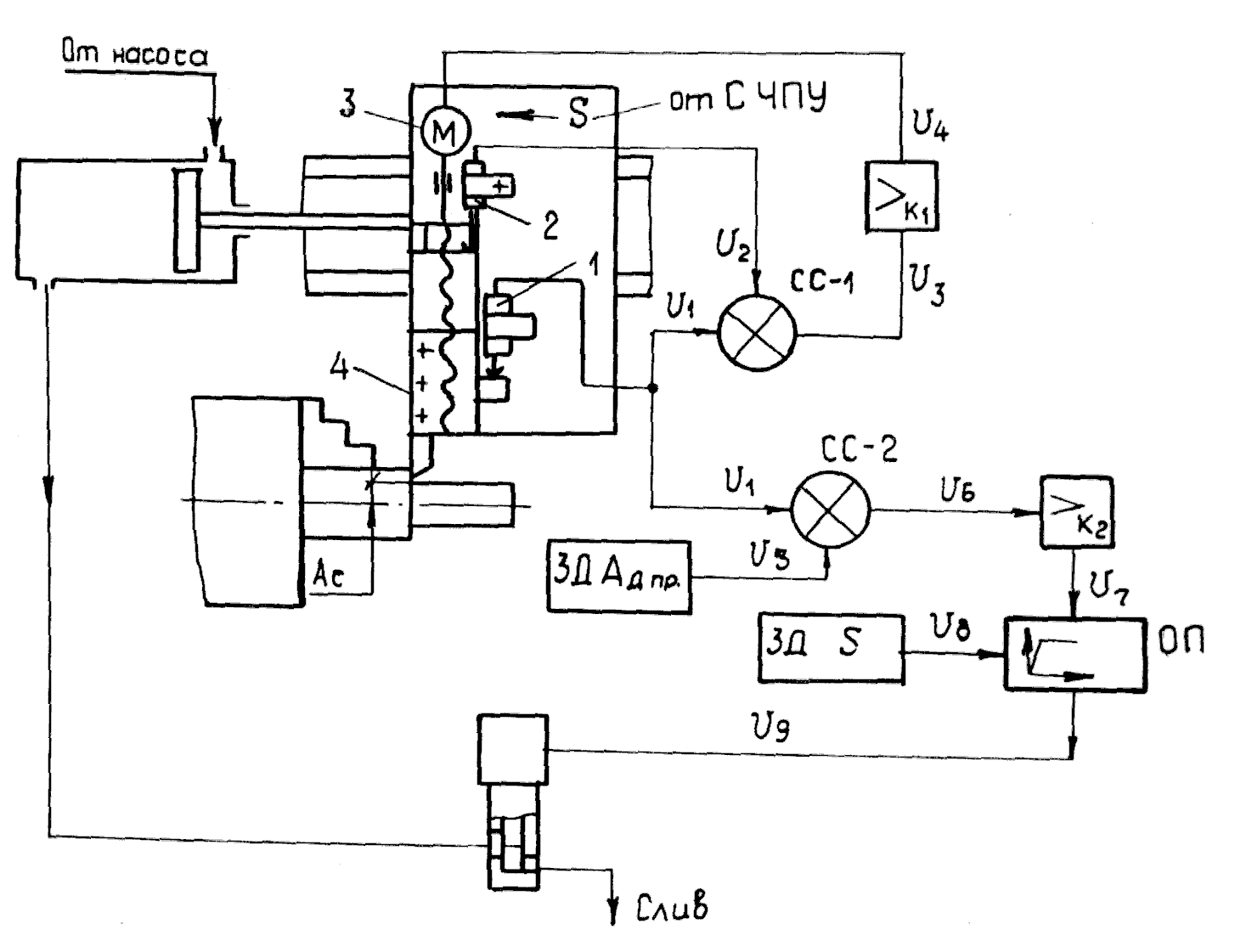
Один контур обеспечивает перемещение суппорта в радиальном направлении на величину Ас = `Ад. Второй контур, имеющей задатчики предельной величины упругого перемещения ЗД Ад пр. и наибольшего значения продольной подачи ЗД S, обеспечивает автоматический поиск и поддержание оптимального значения продольной подачи. Бесступенчатое регулирование подачи достигается с помощью следящего золотника СЗ с электроуправлением, встроеным на выходе гидросистемы станка.
АС работает следующим образом. С индуктивного датчика 1 на схемы сравнения СС-1 и СС-2 непрерывно поступает информация V1, соответствующая величине Ад. На схему СС-1 поступает также сигнал V2 от датчика обратной связи 2, регистрирующего положение резцедержателя 4. Сигнал рассогласования V3 усиливается до V4 = к1V3 и подается на привод малых перемещений 3, выполняющий регулирование размера статической настройки ( Ас = Ад). На схему СС-2 поступает также от задатчика ЗД Ад пр. сигнал V5, соответствующий величине Ад пр.. Сигнал рассогласования V6 усиливается до V7 = к2V6 и подается через ограничитель подачи ОП следящего золотника СЗ. Задатчики ЗД Ад пр., ЗД S и ограничитель подачи ОП формируют сигнал V9, соответствующий оптимальному значению продольной подачи.
3. Измерительный комплекс мцс с чпу для управления точностью обработки в гпс
При изготовлении корпусных деталей в гибких автоматизированных производствах для управления точностью обработки необходимо каждый станок оснащать разветвленным измерительным комплексом. Этот комплекс в своем составе должен иметь (рис. 14.4):
- трехкоординатную телеметрическую головку, хранящуюся в инструментальном магазине станка. Головка должна автоматически устанавливаться в шпиндель станка и через каналы связи давать в систему управления сигналы о своем положении в шпинделе станка и о положении технологических баз детали на станке (СКПУ). По результатам обработки сигналов, поступающих от головки, система управления должна выработать управляющее воздействие на коррекцию управляющей программы движения рабочих органов станка;
- трехкоординатную кабельную головку, установленную на столе станка. Посредствам данной головки автоматизируется процесс размерной настройки каждого инструмента, хранимого в магазине станка, и автоматически настраивается положение исходной точки начала отсчета программных перемещений рабочих органов (СНИ);
- трехкоординатный блок коррекции приводов (БКП) станка, который электронным способом (с помощью ЭВМ) компенсирует систематические и случайные погрешности станка (СКПС);
- систему датчиков, позволяющих регистрировать фактические параметры процесса обработки и управлять точностью и производительностью на базе системы адаптивного управления (САУ);
Оснащение станка таким измерительным комплексом позволяет:
- автоматизировать процесс размерной настройки технологической системы каждого отдельного станка;
- исключить необходимость ручной корректировки оператором процесса достижения требуемой точности изготовления детали, то есть иными словами автоматизировать этот процесс;
- снизить капитальные затраты, связанные с изготовлением вспомогательного инструмента, технологической и контрольно-измерительной оснастки.
Сказанное в полной мере можно отнести к МЦС для обработки тел вращения с той лишь разницей, что телеметрическая и кабельная головка, а также блок коррекций должны быть двухкоординатными. Однако выпускаемые в последнее время токарные МЦС позволяют выполнять и фрезерные работы. Для этих станков перечисленные устройства должны быть трехкоординатными.
Рис. 14.4. Измерительный
комплекс МЦС с ЧПУ для
управления
процессом достижения точности обработки.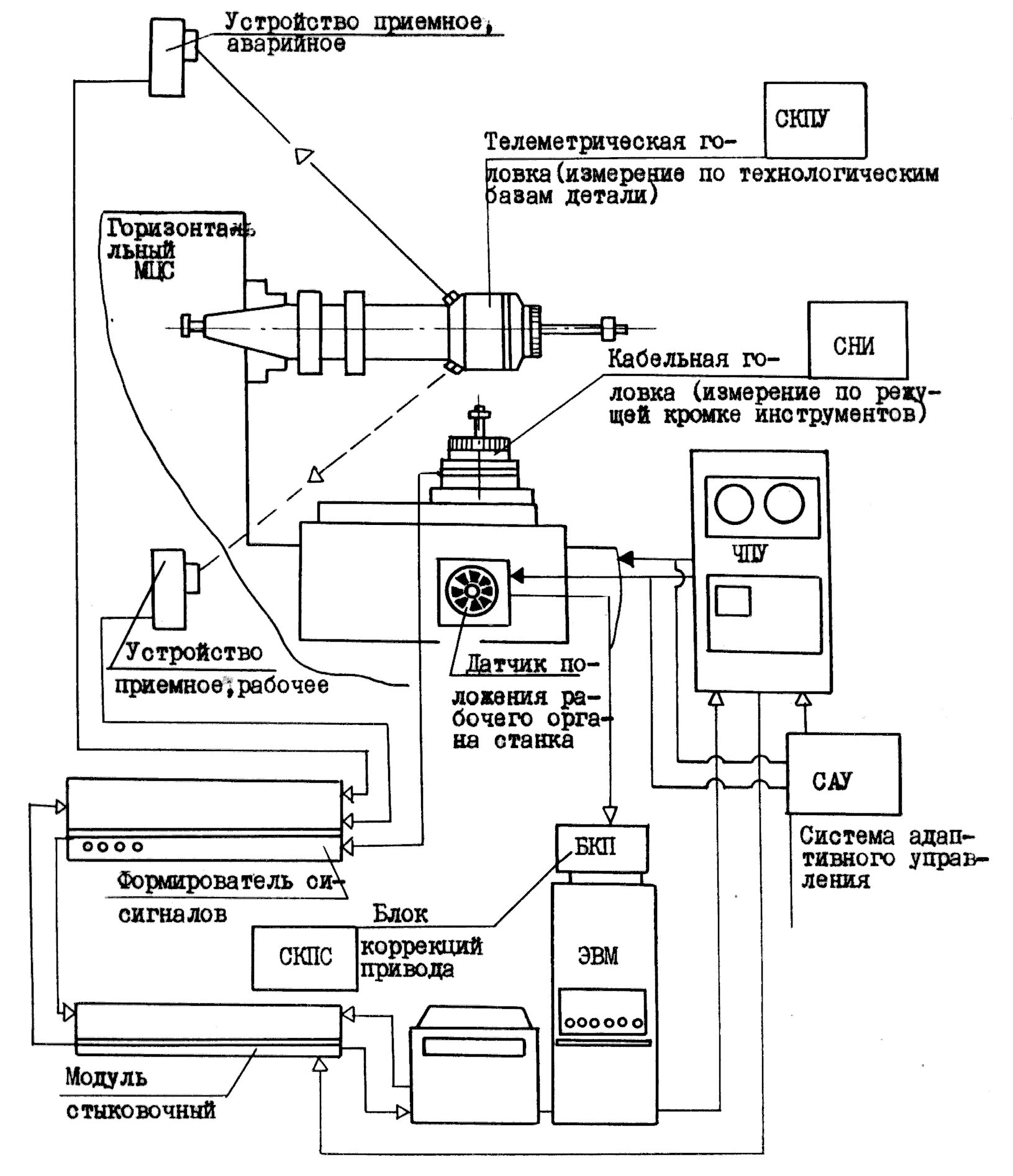
104,1,102,3,100,5,98,7,96,9,94,11,92,13,90,15,88,17,86,19,84,21,82,23,80,25,78,27,76,29,74,31,72,33,70,35,68,37,66,34,64,41,62,43,60,45,58,47,56,49,54,51
2,103,4,101,6,99,8,97,10,95,12,93,14,91,16,89,18,87,20,85,22,83,24,81,26,79,28,77,30,75,32,73,34,71,36,69,38,67,40,65,42,63,44,61,46,59,48,57,50,55,52,53