

2.6 Решение основного уравнения движения поезда графическим
методом
2.6.1 Построение
зависимости
 методом МПС
методом МПС
Линеаризация
зависимости
точно такая же, как и при аналитическом
методе, но способ построения точек 1, 2,
3, 4 и т.д. для зависимости
и точек 1’, 2’, 3’, 4’ и т.д. для зависимости
 –
графический, называется методом МПС,
приведен в ПТР и до появления ПЭВМ
являлся основным в практике производства
тяговых расчетов.
–
графический, называется методом МПС,
приведен в ПТР и до появления ПЭВМ
являлся основным в практике производства
тяговых расчетов.
Пусть дана
зависимость
и
зависимость
до
точки Б ( )
– рисунок 2.5.
)
– рисунок 2.5.
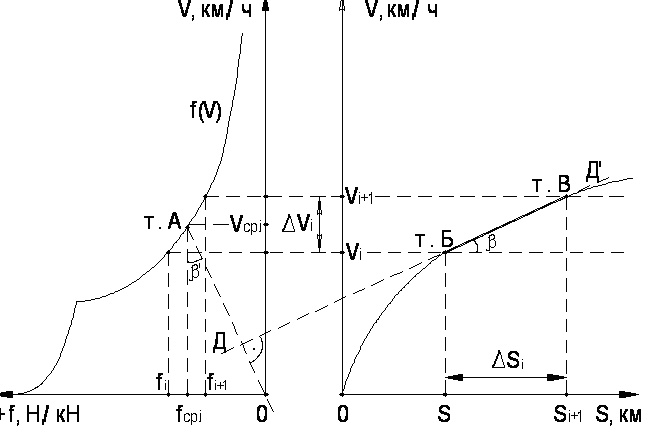
Рисунок 2.5 – Построение зависимости v(s) методом МПС
Рассмотрим
интервал
 (при этом считаем, что профиль пути в
этом интервале площадка, т.е. i
= 0). На зависимости
в интервале
отметим точку А (
(при этом считаем, что профиль пути в
этом интервале площадка, т.е. i
= 0). На зависимости
в интервале
отметим точку А ( ;
; )
и проведем луч АО, к которому через точку
Б проведем перпендикуляр ДД’.
)
и проведем луч АО, к которому через точку
Б проведем перпендикуляр ДД’.
Определим условие, при котором отрезок БВ этого перпендикуляра и будет являться зависимостью в интервале . Обозначим углы β и β’ и запишем:
 ;
(2.30)
;
(2.30)
 .
(2.31)
.
(2.31)
По построению углы
β
и β’
– это углы со взаимно перпендикулярными
сторонами, т.е. β
= β’,
а, значит,
 =
=
 .
Откуда с учетом (2.27) имеем:
.
Откуда с учетом (2.27) имеем:
 .
(2.32)
.
(2.32)
Выражение (2.32) – это условие выбора масштабов, при выполнении которого отрезок БВ и будет являться зависимостью в интервале .
Тогда порядок построения зависимости оказывается следующим:
–
кривую
разбивают на отрезки
 и отмечают в них точки с
;
и отмечают в них точки с
;
– через точки с
и начало координат в системе
проводят лучи
- ,
перпендикуляры к которым и дадут
(
)
в соответствующих интервалах скоростей
в системе
;
,
перпендикуляры к которым и дадут
(
)
в соответствующих интервалах скоростей
в системе
;
– за начало координат в системе в каждом интервале скоростей берется точка “О + i”, которая образуется при сдвиге ВПРАВО на –i ‰ (спуск) или ВЛЕВО на +i ‰ (подъем) от первоначальной точки “О” начала координат в системе .
Примечание. Внутри интервала не должно находиться ни перелома кривой , ни перелома профиля пути.
2.6.2 Построение зависимости методом МПС
Выполняется по предварительно построенной зависимости .
Пусть дана зависимость (кривая 1) и соответствующая ей зависимость (кривая 2) (рисунок 2.6).
Рассмотрим
произвольный интервал
,
которому соответствует интервал
 .
Определим, при каком условии отрезок
БВ луча АА’ в интервале
является зависимостью
,
т.е. его проекция на ось “t”
даст интервал
.
Определим, при каком условии отрезок
БВ луча АА’ в интервале
является зависимостью
,
т.е. его проекция на ось “t”
даст интервал
 .
.
Обозначим угол β. Тогда
 .
(2.33)
.
(2.33)
Возьмем произвольную
прямоугольную систему координат
 ,
которая сопараллельна системе
.
На оси
,
которая сопараллельна системе
.
На оси
 отложим
отрезок О -
(точка С) и проведем из точки С луч СС’,
перпендикулярный лучу АА’. Луч СС’
отсекает на оси x
отрезок Δ.
отложим
отрезок О -
(точка С) и проведем из точки С луч СС’,
перпендикулярный лучу АА’. Луч СС’
отсекает на оси x
отрезок Δ.
Обозначим угол β’. Тогда
 .
(2.34)
.
(2.34)

Рисунок 2.6 – Построение зависимости t(s) методом МПС
По построению углы β и β’ – это углы со взаимно перпендикулярными сторонами, т.е. β = β’. Тогда из равенства их тангенсов и (2.27) следует:
 .
(2.35)
.
(2.35)
Значит, если отрезок
 выбрать по условию (2.35), то перпендикуляр
к лучу, проведенному через точки
и
,
и даст в интервале
зависимость
.
выбрать по условию (2.35), то перпендикуляр
к лучу, проведенному через точки
и
,
и даст в интервале
зависимость
.
Отсюда следует такой порядок построения зависимости :
– берется предварительно построенная зависимость с теми же интервалами и ;
– готовится шаблон, представляющий собой семейство прямоугольных треугольников, имеющих один общий катет, равный по величине , а гипотенузы этих треугольников образованы лучами, соединяющими точку со всеми точками , находящимися на втором катете;
– шаблон ( ) располагается так, чтобы его ось была параллельна оси скорости зависимости ;
– перпендикуляры, проведенные к этим лучам, и дают зависимость в соответствующих интервалах .
2.6.3 Пример

Рисунок 2.8 – Пример построения кривых движения поезда методом МПС
Примечание. Согласно рассмотренной технологии проведения вычислительных процедур при решении основных уравнений движения поезда аналитическим и графическим методами основной блок блок-схемы математической модели движения поезда может быть представлен следующим образом:

2.6.4 Тормозные расчеты
а) Постановка задачи
Процесс движения поезда в режиме механического торможения определяется следующими четырьмя взаимосвязанными физическими факторами:
– тормозными
средствами поезда – bт ,
Н/кН;
,
Н/кН;
– профилем пути
–
 ,
Н/кН;
,
Н/кН;
– скоростью начала торможения – Vнт, км/ч;
– величиной тормозного пути – Sт, м.
Отсюда следует, что в общем случае возможны четыре группы тормозных задач по определению одной из четырех неизвестных величин по оставшимся известным трем величинам. Учитывая, что обычно задаются профилем пути и тормозными средствами поезда, то на практике встречаются два следующих вида тормозных задач:
– определение тормозного пути по известному профилю пути, заданным тормозным средствам поезда и скорости начала торможения;
– определение допустимой скорости начала торможения по известному профилю пути, заданным тормозным средствам поезда и заданному тормозному пути.
Первая задача встречается при регулировочном и служебном торможениях, а вторая – при экстренном торможении.
б) Решение тормозной задачи при регулировочном торможении
Здесь построение зависимости v(s) производится методом МПС, а за равнодействующую силу поезда принимается
fмт.сл = – 0,5·bт. (2.36)

Рисунок 2.8 – Решение тормозной задачи при регулировочном торможении
в) Решение тормозной задачи при служебном торможении
Равнодействующая сила поезда определяется по (2.36). Если отсутствует точное указание места остановки поезда, то решение задачи производится точно так же, как и при регулировочном торможении, но только ведется оно до полной остановки поезда.
Если место остановки задано (например, на конкретном раздельном пункте), то графическое построение зависимости v(s) ведется уже справа налево, т.е. от точки заданной остановки поезда до точки пересечения (т. А) с зависимостью v(s), идущей от начала участка – рисунок 2.9.

Рисунок 2.9 – Решение тормозной задачи при служебном торможении
г) Решение тормозной задачи при экстренном торможении
В этом случае за равнодействующую силу поезда принимается:
fэт = – bт. (2.37)
Как известно, в связи со спецификой действия автотормозов полный тормозной путь Sт имеет две составляющие:
Sт = Sпт + Sдт, (2.38)
где Sпт – тормозной путь, пройденный поездом за время подготовки
тормозов к действию;
Sдт – тормозной путь, пройденный поездом за время действия тормозов.
Подготовительный тормозной путь Sпт, м, определяется по выражению
Sпт = 0,278 ·Vнт· tпт, (2.39)
где Vнт – скорость начала торможения, км/ч;
tпт – время подготовки тормозов к действию, с;
tпт
 ,
(2.40)
,
(2.40)
где a, d – коэффициенты, значения которых для грузовых поездов определя-
ются числом осей, а для пассажирских – наличием электропневма-
тических тормозов [1];
i – значение уклона на тормозном пути, ‰ (при спуске значение брать
со знаком «минус»).
Действительный тормозной путь Sдт определяется путем решения основных уравнений движения поезда графическим методом МПС.
Тогда решение тормозной задачи при экстренном торможении может быть получено графическим способом: если из начала заданного тормозного пути Sт по выражению (2.39) построить зависимость sпт(vнт), а из конца тормозного – зависимость sпт(vнт), то точка их пересечения и даст значение допустимой скорости начала торможения – Vнт.доп (рисунок 2.10).
 Рисунок 2.10 –
Решение тормозной задачи при экстренном
торможении
Рисунок 2.10 –
Решение тормозной задачи при экстренном
торможении
Примечание. Если окажется, что Vнт.доп > Vдоп, то это означает, что ограничение по скорости начала торможения на данном элементе профиля пути отсутствует. Обычно тормозную задачу при экстренном торможении решают на самом крутом спуске участка.