

8. Классические методы решения дифференциальных уравнений
9. Операторные методы решения дифференциальных уравнений
Алгоритм решения дифференциальных уравнений операторным методом: 1. По заданному входному воздействию u(t) с помощью таблиц или интеграла Лапласа (2.3) находится его изображение U(p). 2. По дифференциальному уравнению составляется передаточная функция W(p). 3. Определяется изображение выходной переменной по выражению . 4. Определяется оригинал y(t) на основе обратного преобразования Лапласа с помощью таблиц по изображению Y(p).
Пусть дано дифференциальное уравнение:
![]() ,
,
где f(t) –
оригинал, а ![]() (i
= 1,2,..,n) – постоянные коэффициенты. Будем
искать решение этого уравнения,
удовлетворяющее начальным условиям
(i
= 1,2,..,n) – постоянные коэффициенты. Будем
искать решение этого уравнения,
удовлетворяющее начальным условиям ![]() .
Обозначим изображение исходной функции
.
Обозначим изображение исходной функции ![]() ,
после чего найдем изображения правой
и левой частей уравнения. Получив
вспомогательное уравнение, разрешим
его относительно X(p) и
найдем оригинал его, то есть x(t).
,
после чего найдем изображения правой
и левой частей уравнения. Получив
вспомогательное уравнение, разрешим
его относительно X(p) и
найдем оригинал его, то есть x(t).
Пример 4. Решить дифференциальное уравнение
![]()
при
начальных условиях ![]() .
.
Решение. Полагая
,
получим
операторное уравнение с учетом ![]()
Так
как ![]() имеет
корни
имеет
корни ![]() и
и ![]() ,
то
,
то
![]() .
.
Значит, ![]() .
.
Разложим X(p) на простейшие дроби:
![]() .
.
Отсюда
![]() .
.
Подставим в обе части этого тождества p=1. Тогда имеем
![]() .
.
Полагая , получим
![]() ,
откуда
,
откуда ![]() .
Далее, подставляя найденные A и C в
тождество, получим
.
Далее, подставляя найденные A и C в
тождество, получим
![]() .
.
Приравнивая свободные члены в обеих частях тождества, получаем уравнение для определения B:
![]()
а ![]() .
И следовательно,
.
И следовательно, ![]() .
.
10. Матричный метод решения уравнения.
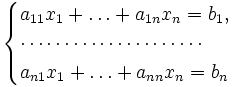
Ма́тричный метод решения (метод решения через обратную матрицу) систем линейных алгебраических уравнений с ненулевым определителем состоит в следующем.
Пусть
дана система линейных уравнений
с ![]() неизвестными
(над произвольным полем):
неизвестными
(над произвольным полем):
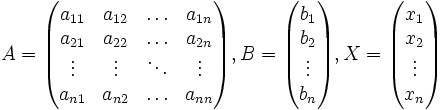
Тогда её можно переписать в матричной форме:
![]() ,
где
,
где ![]() —
основная матрица системы,
—
основная матрица системы, ![]() и
и ![]() —
столбцы свободных членов и решений
системы соответственно:
—
столбцы свободных членов и решений
системы соответственно:
Умножим
это матричное уравнение слева на ![]() —
матрицу, обратную к матрице
:
—
матрицу, обратную к матрице
:
![]()
Так
как ![]() ,
получаем
,
получаем ![]() .
Правая часть этого уравнения даст
столбец решений исходной системы.
Условием применимости данного метода
(как и вообще существования решения
неоднородной системы линейных уравнений
с числом уравнений, равным числу
неизвестных) является невырожденность матрицы
A. Необходимым и достаточным условием
этого является неравенство нулю определителя
матрицы A:
.
Правая часть этого уравнения даст
столбец решений исходной системы.
Условием применимости данного метода
(как и вообще существования решения
неоднородной системы линейных уравнений
с числом уравнений, равным числу
неизвестных) является невырожденность матрицы
A. Необходимым и достаточным условием
этого является неравенство нулю определителя
матрицы A:
![]() .
.
Для
однородной системы линейных уравнений,
то есть когда вектор ![]() ,
действительно обратное правило:
система
,
действительно обратное правило:
система ![]() имеет
нетривиальное (то есть ненулевое) решение
только если
имеет
нетривиальное (то есть ненулевое) решение
только если ![]() .
.
Такая связь между решениями однородных и неоднородных систем линейных уравнений носит название альтернативы Фредгольма.
11.Устоичивость автоматических систем.
Устойчивость — свойство САУ возвращаться в заданный или близкий к нему установившийся режим после какого-либо возмущения.
Устойчивая САУ — система, в которой переходные процессы являются затухающими.
![]() —
операторная форма
записи линеаризированного уравнения.
—
операторная форма
записи линеаризированного уравнения.
y(t) = yуст(t)+yп = yвын(t)+yсв
yуст(yвын) — частное решение линеаризированного уравнения.
yп(yсв) —
общее решение линеаризированного
уравнения как однородного дифференциального
уравнения, то есть ![]()
САУ
устойчива, если переходные процессы
уn(t),
вызываемые любыми возмущениями, будут
затухающими с течением времени, то
есть ![]() при
при ![]()
Решая дифференциальное уравнение в общем случае, получим комплексные корни pi, pi+1 = ±αi ± jβi
Каждой паре комплексно-сопряженных корней соответствует следующая составляющая уравнения переходного процесса:
![]() ,
где
,
где ![]() ,
, ![]()
Из полученных результатов видно, что:
при ∀αi<0 выполняется условие устойчивости, то есть переходный процесс с течением времени стремится к ууст (Теорема Ляпунова 1);
при ∃αi>0, выполняется условие неустойчивости (Теорема Ляпунова 2), то есть
 ,
что приводит к расходящимся колебаниям;
,
что приводит к расходящимся колебаниям;при ∃αi=0 и ¬∃αi>0
 ,
что приводит к незатухающим синусоидальным
колебаниям системы (система на границе
устойчивости) (Теорема
Ляпунова 3).
,
что приводит к незатухающим синусоидальным
колебаниям системы (система на границе
устойчивости) (Теорема
Ляпунова 3).