

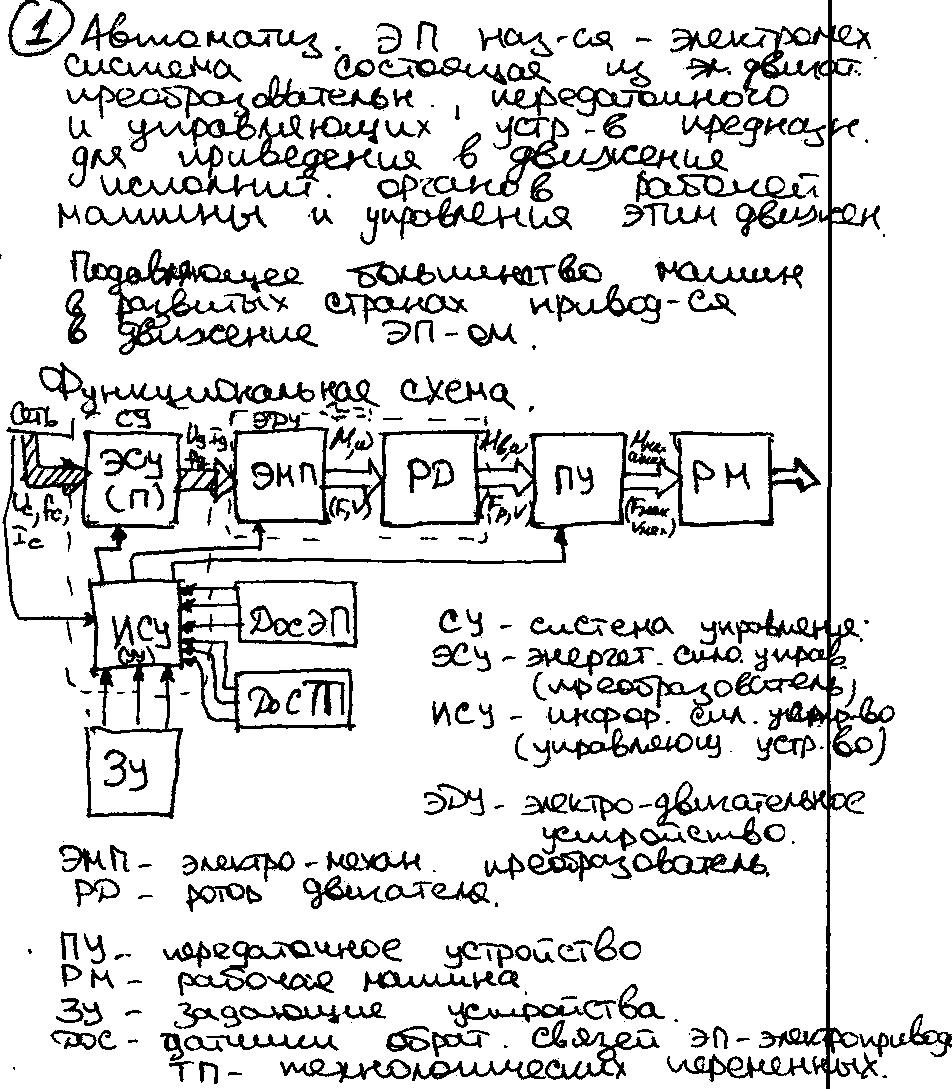
1. Определение понятия «электропривод» (ЭП). Функциональная схема ЭП в наиболее развитом виде. Назначение элементов схемы.
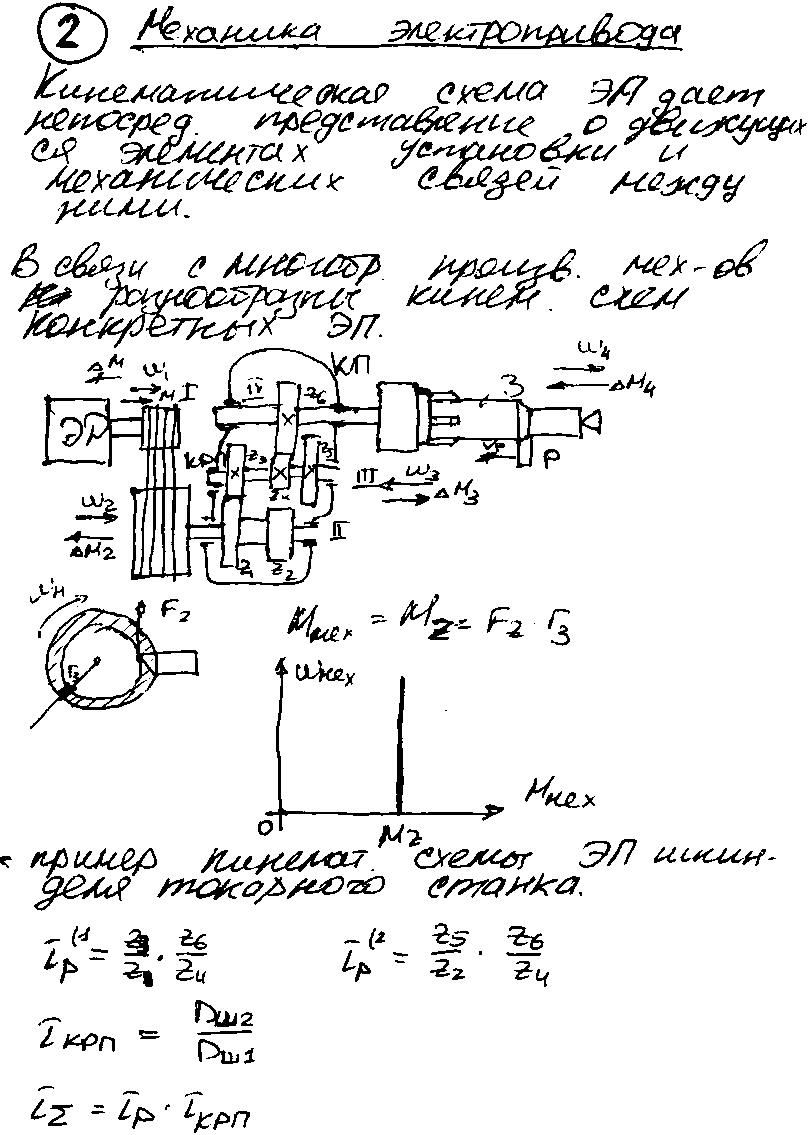
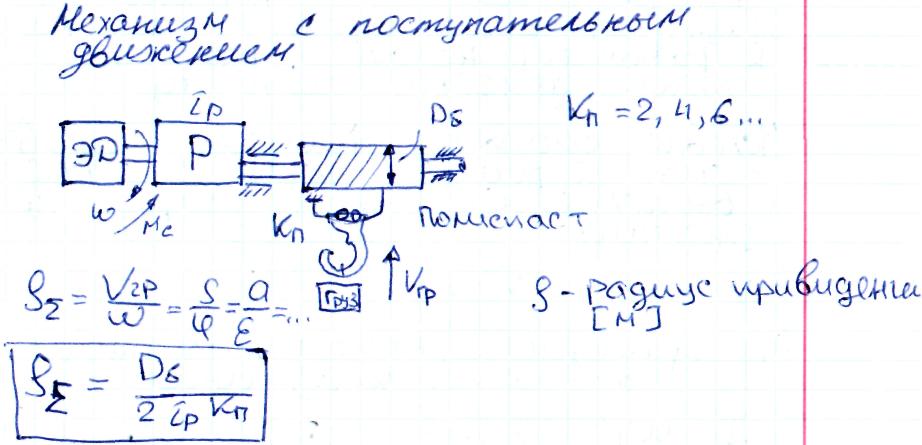
2. Кинематические схемы ЭП. Пример конкретной кинематической схемы. Суммарные передаточное число и радиус приведения. Расчетная механическая схема и ее отличие от кинематической.
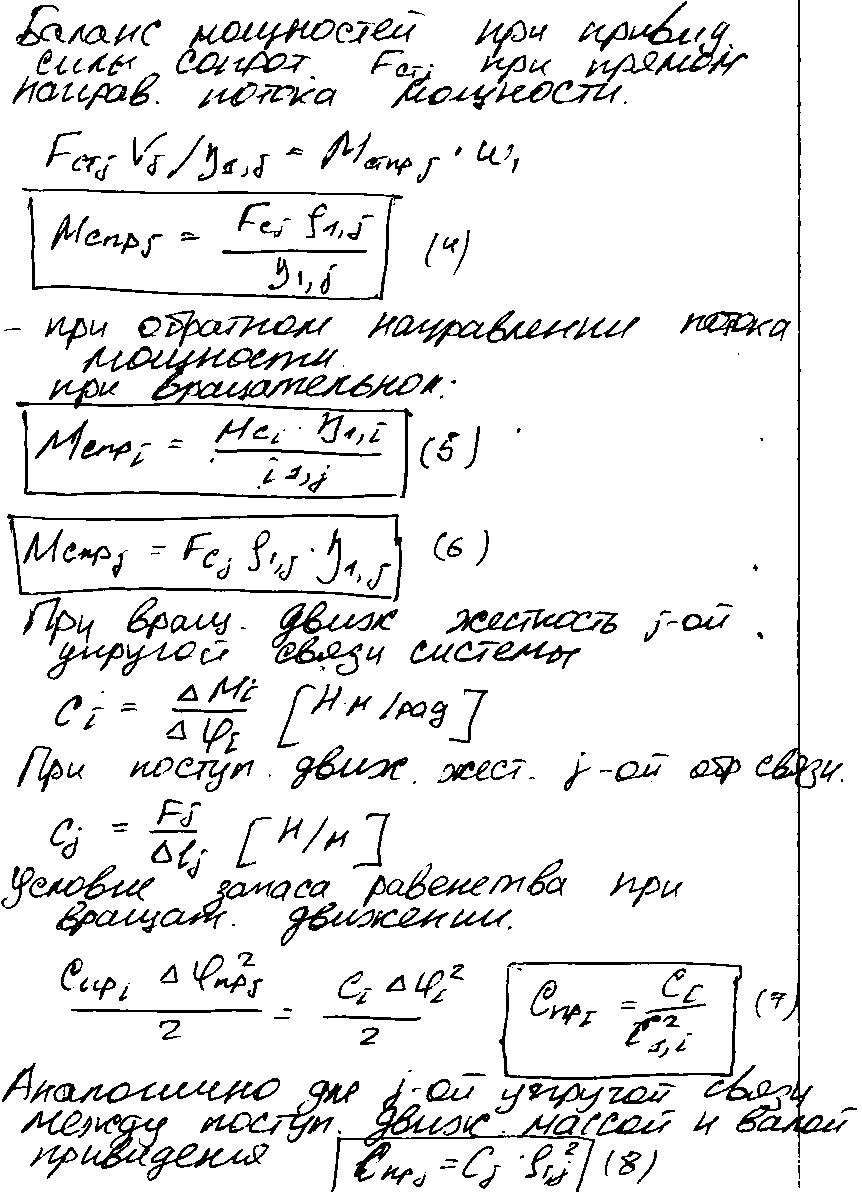
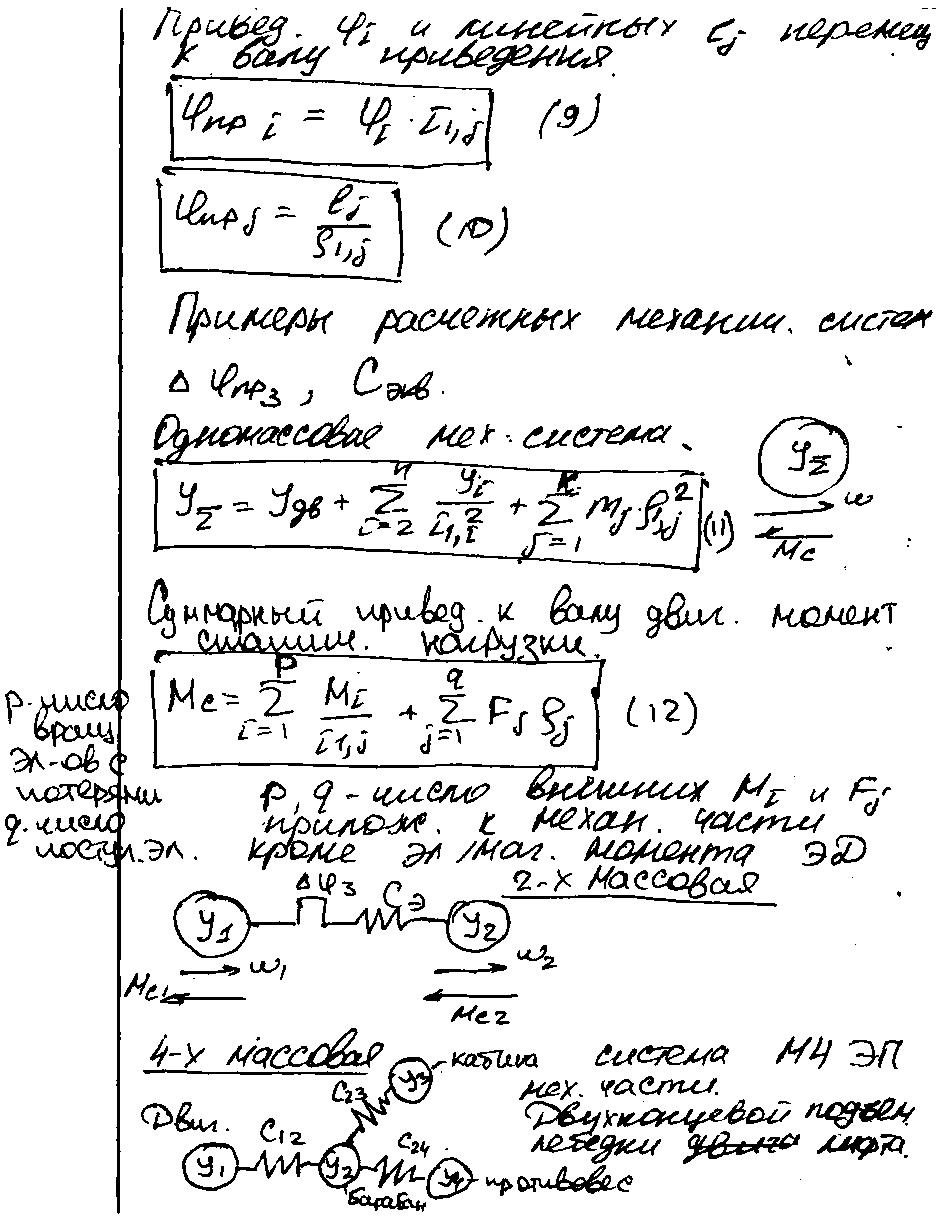
3. Приведение к выбранному элементу кинематической схемы масс, моментов инерции, сил и моментов сил, угловых и линейных перемещений, жесткостей упругих связей остальных элементов. Суммарные момент инерции и момент сопротивления ЭП. Результирующая жесткость связи между основными массами.

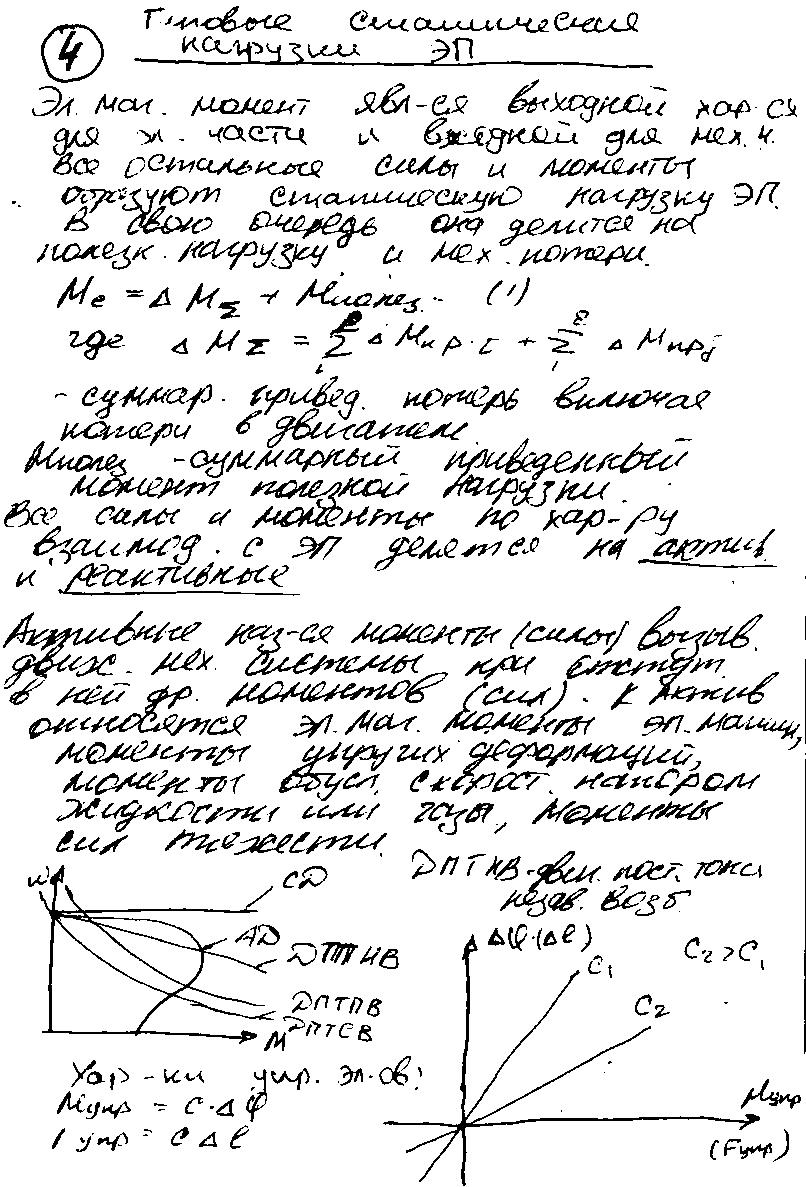
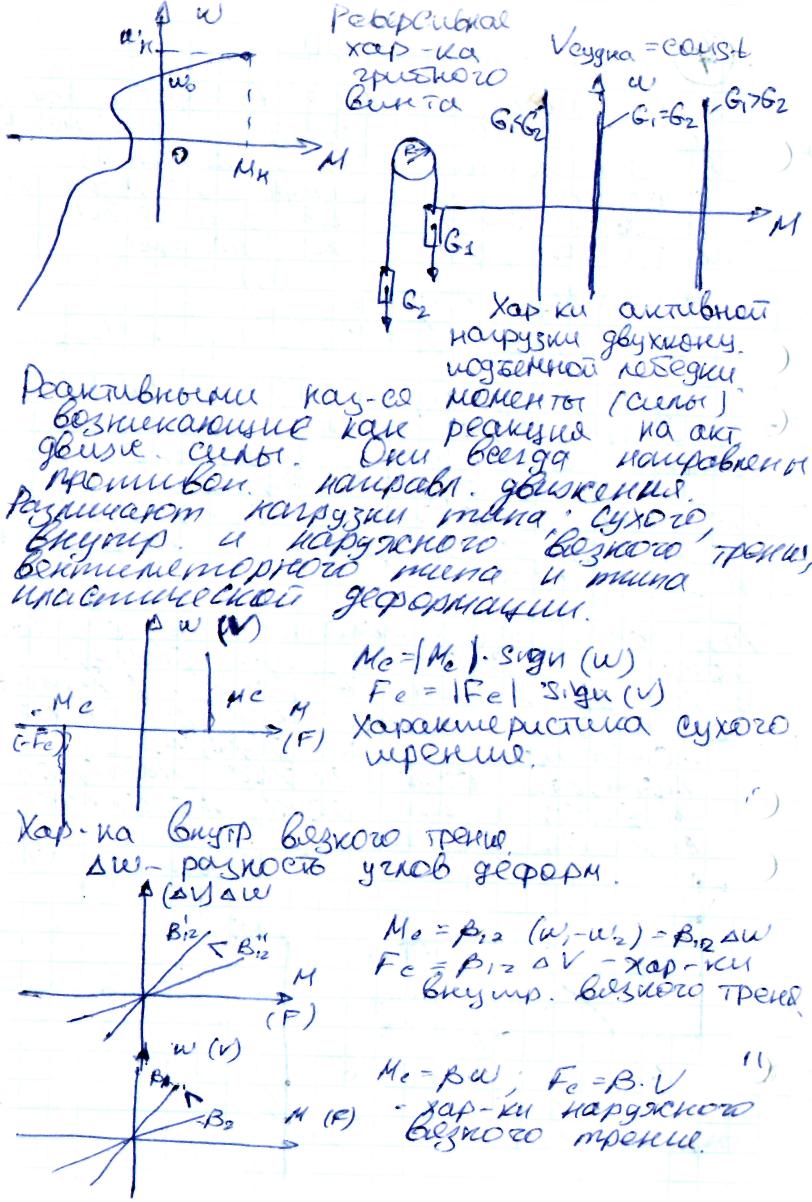
4. Виды ЭП по направлению и характеру движения РО. Активные и реактивные нагрузки: определения, классификация и характеристики. Консервативные силы и моменты сил.

5. Группы рабочих машин. Механические характеристики машин, момент которых является функцией скорости.
I. Рабочие машины, нагрузка которых не зависит от скорости РО (n=0) (подъемные краны, лифты, бумагоделательные машины).
II. Механизмы нагрузка, которых является функцией скорости РО:
а) n=1 (механизмы, нагрузка которых обусловлена силами и моментами жидкостного трения, генераторы постоянного тока НВ, работающие на постоянное внешнее сопротивление)
б) 1<n<3 (вентиляторы, центробежные насосы, компрессоры, гребные установки)
в) n=-1 (моталки, разматыватели, некоторые прокатные станы, металлорежущие станки)
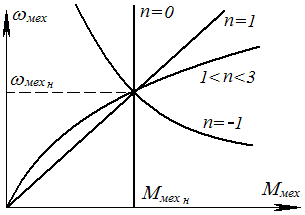
n – степень зависимости момента от скорости
III. Механизмы нагрузка, которых является функцией пути РО (поршневые насосы, прессы, ножницы, подъемники без уравновешивающих канатов)
IV. Механизмы нагрузка, которых является функцией скорости и пути (рулевые устройства судов, машины электрического транспорта, разводные мосты)
V. Механизмы нагрузка, которых является случайной функцией времени (дефибреры, шаровые мельницы, буровые установки)
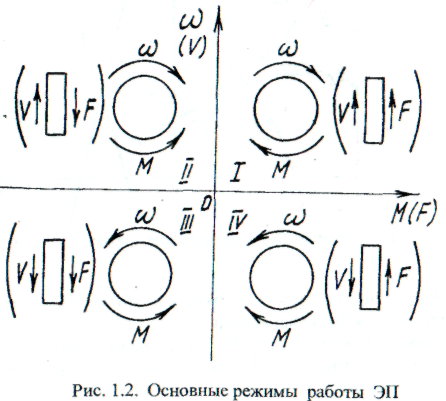
6. Режимы работы, характеристики и ограничения в ЭП. Статическая и динамическая жесткость механических характеристик ЭД и ЭП.
По зависимости от времени выходной переменной режимы работы ЭП делятся на статические (постоянство переменной) и динамические (изменение переменной во времени). Последние по виду изменения переменной подразделяются на две группы:
-переходные процессы (переход переменной от одного уровня к другому);-установившиеся динамические режимы (периодическое изменение переменной).Динамические режимы возникают вследствие скачкообразного или плавного изменения во времени управляющих или возмущающих .воздействий, а иногда тех и других одновременно. Управляющим называется сознательное воздействие на ЭП с целью изменения уровня выходной переменной. Процессы пуска, торможения. реверсирования ЭП - это примеры переходных процессов, обусловленных изменением управляющего воздействия. Возмущающими называются воздействия, обусловленные внешними факторами (случайные изменения выходных переменных источника питания, нагрузки на валу, температуры окружающей среды и др.).Зависимость со = f(M) (или V = f(F)) называется механической характеристикой ЭД (ЭП). Различают статические и динамические механические характеристики. В каждой точке статической характеристики ЭД может работать весьма долго, а переход из одной точки в другую происходит с ускорением, стремящимся к нулю. Динамическая характеристика,
называемая иначе фазовой траекторией, получается из кривых м/и и Mfu путем исключения времени
![]()
![]()
Статические характеристики могут быть линейными и нелинейными. Параметром, характеризующим наклон характеристики в рассматриваемой точке, является статическая жесткость
Жесткость линейных характеристик может меняться в широких пределах от 0 до + да (рис. 1.3), являясь постоянной для каждой характеристики. Динамическая жесткость - это передаточная функция ЭМП в операторной форме, где входом является w(p) или V(p), а выходом - - М(р) или F(p). При вращательном движении.
Ограничения:
Скорость – механическая прочность ротора
2.Ускорение – допустимость динамических нагрузок
3.Рывок – установки пассажирского транспорта (эскалаторы)
4.Ток якоря – искрение в коллекторном узле
5.Момент – АД и СД при пониженном напряжении
6.Нагрев – ограничение срока службы
![]() -
статическая жесткость
-
статическая жесткость
![]() -
динамическая жесткость
-
динамическая жесткость
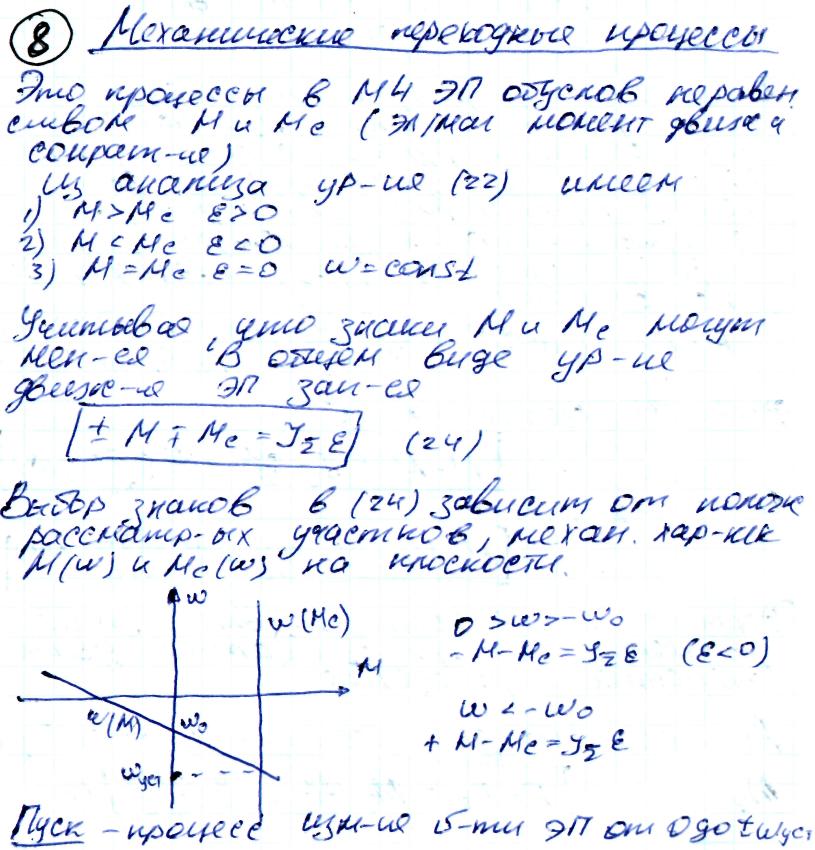
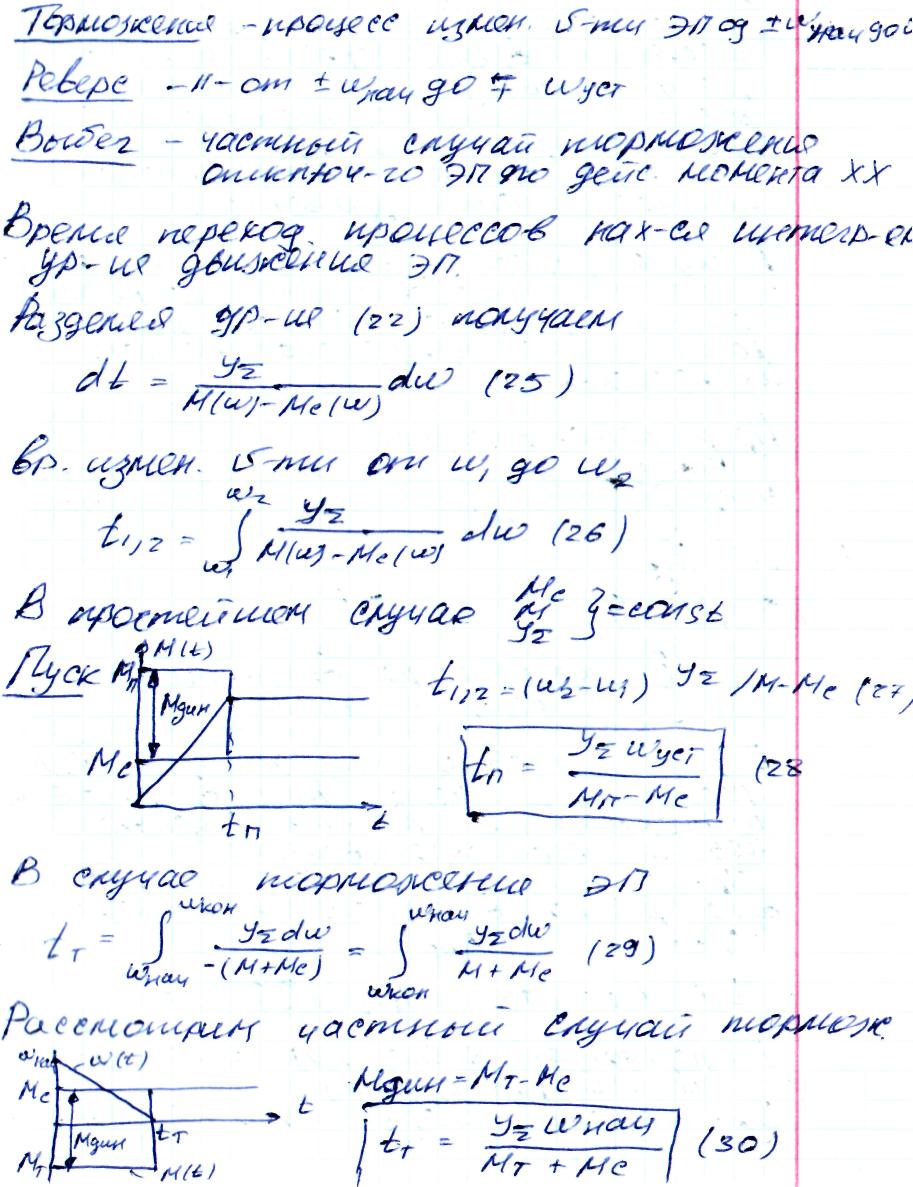
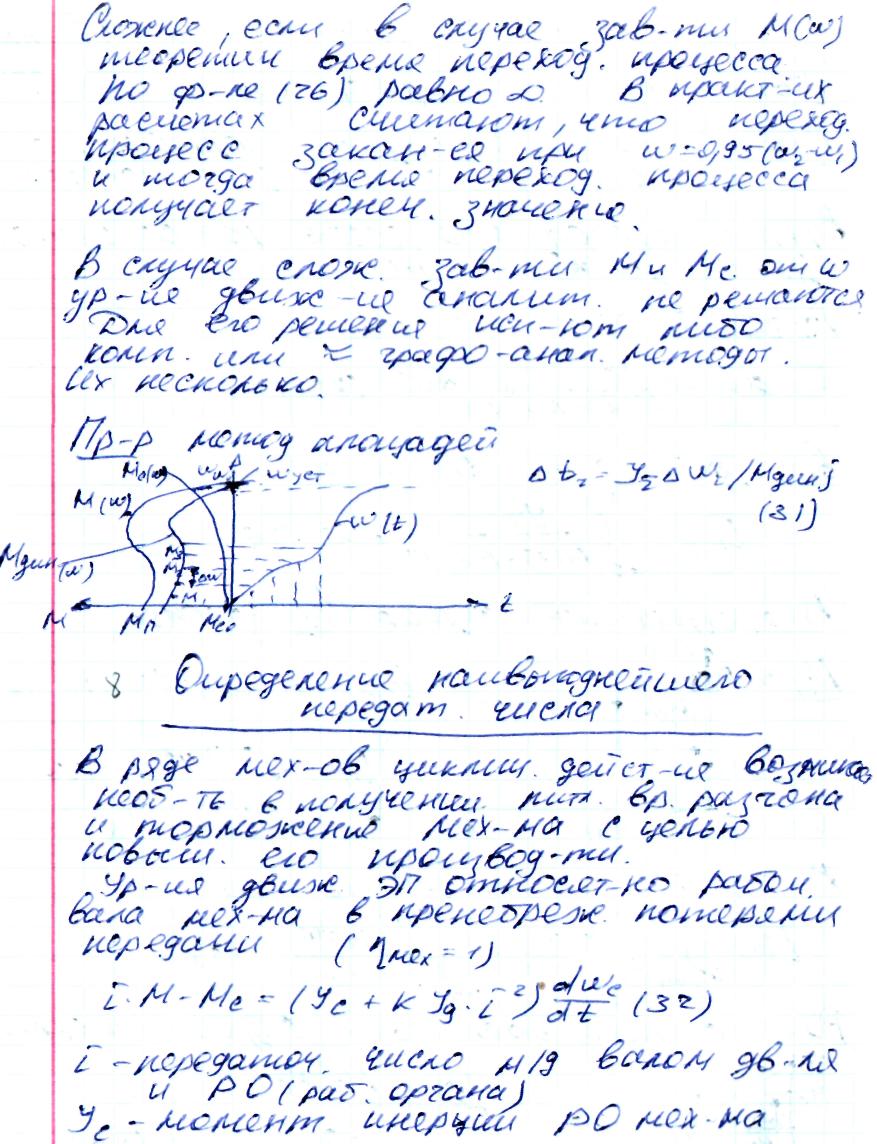
8. Нахождение зависимостей M(t), Mc(t) и ω(t) при графическом задании характеристик ω(М) и ω(Мс). Определение наивыгоднейшего передаточного числа.
9. Регулируемые координаты ЭП. Показатели регулирования переменных в ЭП.
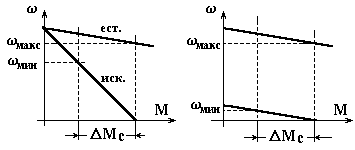
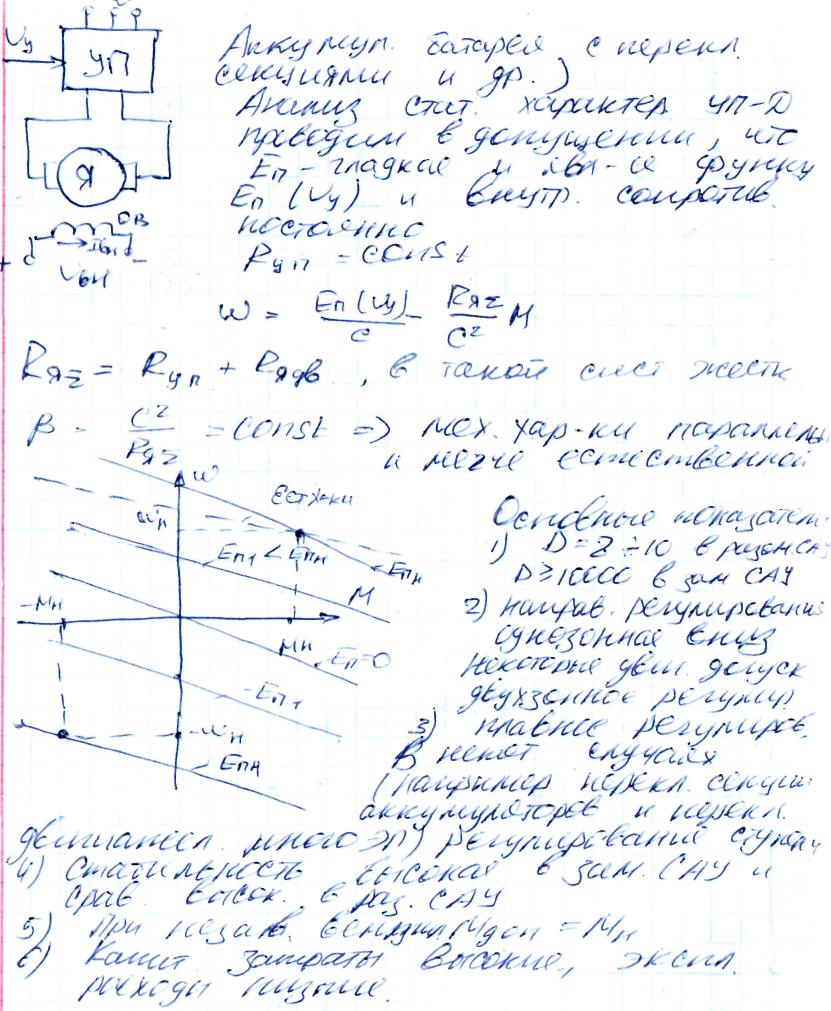
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной - однозонное регулирование вниз от основной скорости, только выше естественной - однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной - двухзонное регулирование.
2.
Диапазон
регулирования
- отношение максимальной возможной
скорости к минимальной
![]() при заданных изменениях момента нагрузки
- рис. 2.8. Легко видеть, что одинаковым
естественным характеристикам и изменениям
момента
при заданных изменениях момента нагрузки
- рис. 2.8. Легко видеть, что одинаковым
естественным характеристикам и изменениям
момента
![]() могут соответствовать сильно различающиеся
диапазоны регулирования, что связано
с жесткостью искусственных характеристик.
могут соответствовать сильно различающиеся
диапазоны регулирования, что связано
с жесткостью искусственных характеристик.
а) б)
Рис. 2.8. К определению диапазона регулирования скорости
С
жесткостью характеристик связан также
еще один показатель - стабильность
скорости на
искусственных характеристиках. Она
может быть низкая - рис. 2.8,а и высокая
рис. 2.8,б; иногда требуется абсолютно
жесткие характеристики (![]() ),
иногда, напротив, нужны очень мягкие
характеристики (регулирование момента).
),
иногда, напротив, нужны очень мягкие
характеристики (регулирование момента).
3. Плавность регулирования - возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, - плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик - ступенчатое регулирование.
4. Допустимая нагрузка на искусственных характеристиках - очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя.
Допустимая нагрузка на естественной характеристике известна по определению - это номинальный момент двигателя Мн. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн. Тогда допустимый момент для принудительно охлаждаемого двигателя
![]() (2.5)
(2.5)
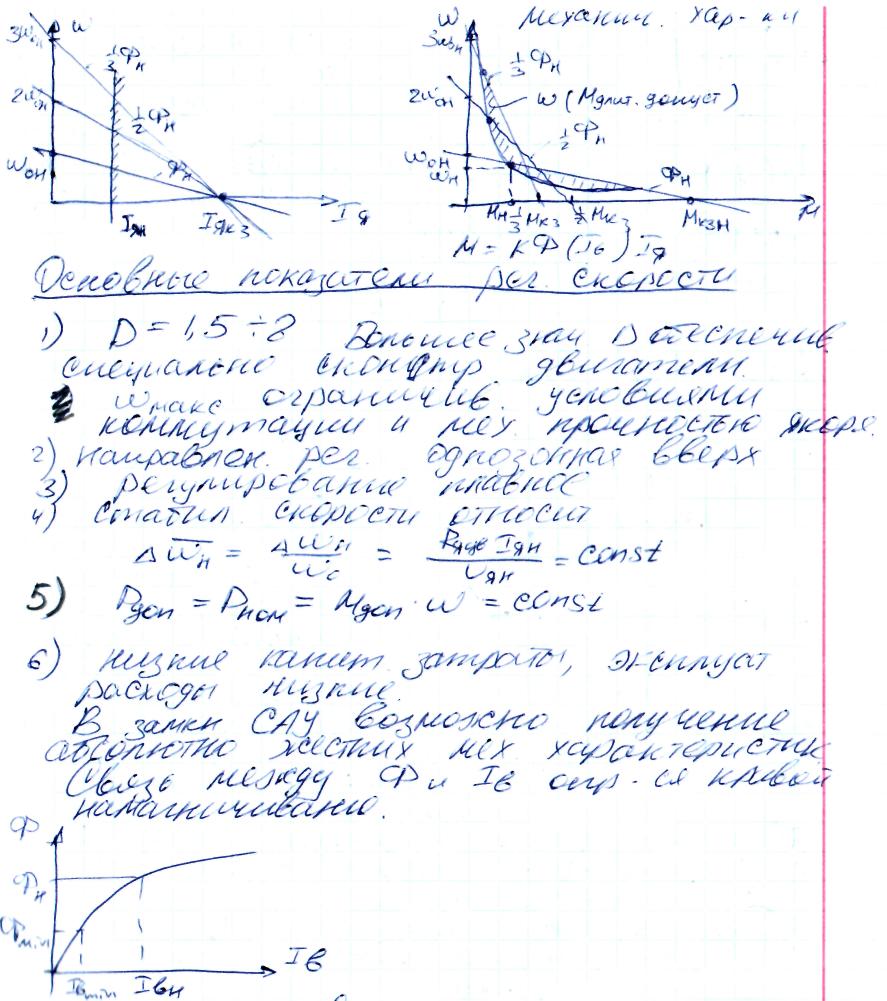
будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с Ф = Фн = const Мдоп IнФн = Мн. Грубая оценка (2.5) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
5.
Экономичность регулирования
оценивается потерями энергии,
сопровождающими тот или иной способ
регулирования. Иногда экономичность
удается грубо оценить, сравнивая полезную
мощность
![]() с потребляемой из сети Р1,
т.е.:
с потребляемой из сети Р1,
т.е.:
![]() . (2.6)
. (2.6)
6.
Затраты на
регулирование
можно определить как стоимость
дополнительного оборудования Ст.
Обор.,
используемого для осуществления
регулирования. Эффективность затрат
удобно оценивать сроком их окупаемости
Ток
![]() (2.8)
(2.8)
где Год.эфф.- цена годового эффекта от использования регулирования.
10. ЭП с ДПТНВ. Регулирование скорости ЭП с разомкнутой САУ изменением напряжения на якоре. Схема, характеристики, показатели регулирования.
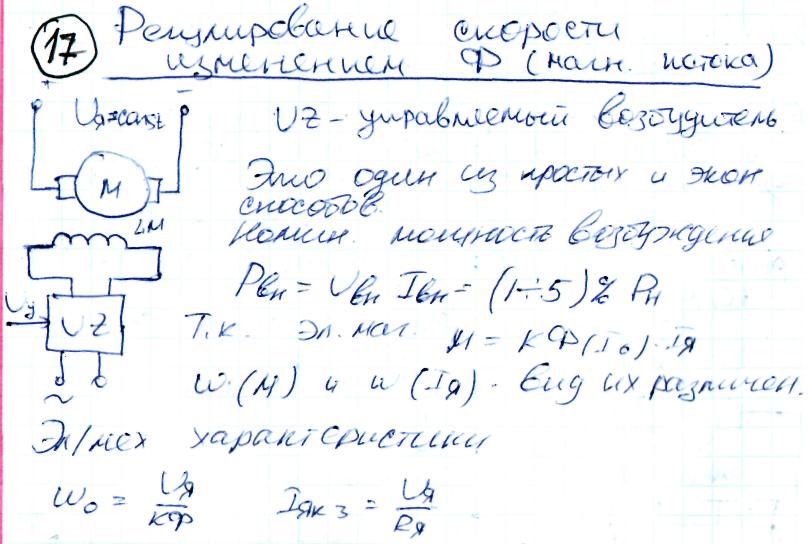
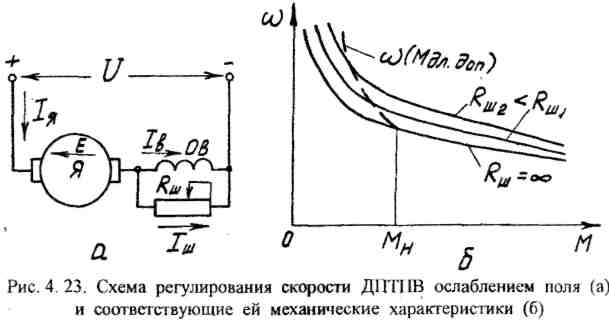
11. Регулирование скорости ДПТНВ изменением магнитного потока. Схема, механические и электромеханические характеристики, показатели регулирования.
12. Тормозные режимы работы ДПТНВ, схемы, характеристики. Оценка экономичности способов торможения.
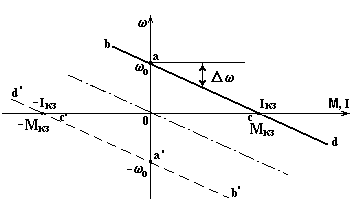
Скорость
![]()
а) Торможение с отдачей энергии в сеть (рекуперативное) или генераторный режим работы параллельно с сетью
нет.
б) Торможение противовключением или генераторный режим работы последовательно с сетью
В режиме противовключения изменяет знак скорость двигателя при сохранении знака момента или знак момента двигателя при сохранении знака скорости.
Первый случай имеет место при воздействии активного момента статической нагрузки, превышающего момент короткого замыкания на данной характеристике.
В
результате изменения знака скорости
ЭДС двигателя будет совпадать с
приложенным напряжением, и ток в якоре
определится выражением: ![]()
Второй случай используется для остановки двигателя путем изменения полярности напряжения, подводимого к его якорю.
Вследствие
механической инерции скорость двигателя
и ЭДС в начальный момент сохраняются
неизменными, а ток будет равен: ![]()
На механических характеристиках (рис. 3.3) торможению противовключением соответствуют участки cd и c’d’.
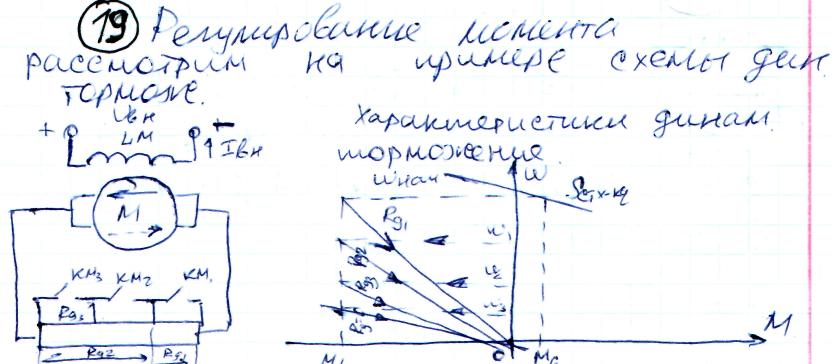
в) Динамическое торможение или генераторный режим работы независимо от сети
Если
якорная цепь отключена от источника
питания и замкнута на внешний резистор,
то при вращении двигателя от внешнего
источника или по инерции в якорной цепи
индуцируется ЭДС и протекает ток
![]() ,
создающий момент. Характеристики
проходят через начало координат -
штрих-пунктир на рис. 3.3.
,
создающий момент. Характеристики
проходят через начало координат -
штрих-пунктир на рис. 3.3.
13. ЭП с ДПТПВ. Естественные схема включения и характеристики. Двигательный и тормозные режимы. Реостатное регулирование скорости.
В![]() указанных двигателях обмотка возбуждения
LM
предназначена для последовательного
включения в якорную цепь (рис. 4.18), поэтому
она выполняется
проводом того же сечения, что и обмотка
якоря, имеет малое активное сопротивление
Rв
< Rя,
и в электрических схемах изображается
иначе, чем обмотка независимого
возбуждения. В подавляющем большинстве
двигателей на зажимы клеммной колодки
выводятся оба конца обмотки якоря
и оба конца обмотки возбуждения. В
некоторых двигателях
указанных двигателях обмотка возбуждения
LM
предназначена для последовательного
включения в якорную цепь (рис. 4.18), поэтому
она выполняется
проводом того же сечения, что и обмотка
якоря, имеет малое активное сопротивление
Rв
< Rя,
и в электрических схемах изображается
иначе, чем обмотка независимого
возбуждения. В подавляющем большинстве
двигателей на зажимы клеммной колодки
выводятся оба конца обмотки якоря
и оба конца обмотки возбуждения. В
некоторых двигателях
Естественными называются статические характеристики двигателя (см. рис. 4.18) при номинальном напряжении питания U = UH и отсутствии добавочных сопротивлений (рис. 4.20,а,б). Штриховыми линиями на них показаны характеристики идеального двигателя с внутренним сопротивлением Rдв = О, называемые граничными характеристиками. Коэффициенты допустимых перегрузок по току и моменту двигателей последовательного возбуждения лежат в пределах л1 = Iдоп Iн = =2...2,5, л = Мдоп,/Мн = 2,5..З.
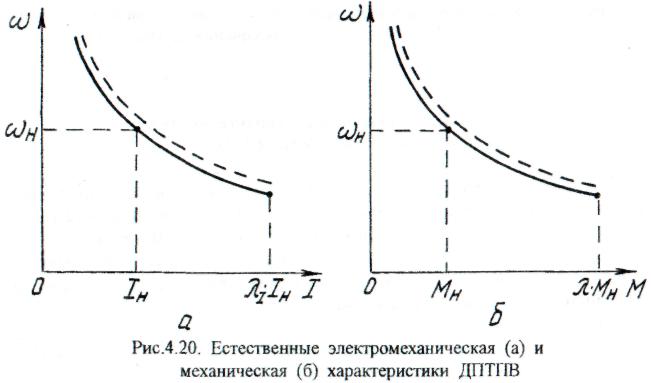
Особенностью естественной механической характеристики двигателя является условие работы с примерным постоянством мощности (источник мощности). Во избежание недопустимого повышения скорости минимальная нагрузка двигателя по моменту не должна быть меньше 20...25% номинальной.
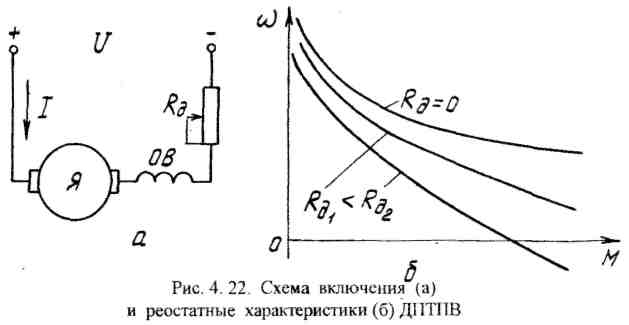
Реостатное регулирование скорости и момента двигателя обеспечивается введением в силовую цепь добавочных резисторов (рис. 4 22,а) при напряжении питания, обычно равном номинальному. В случае U = UH, используя уравнения естественной wе = (Uн-IRдв)/с(I) и реостатной w = [UH-I(Rдв + Rд)]/с(I) электромеханических характеристик, получаем зависимость w( we) при заданном токе
![]()
С помощью (4.51), естественной характеристики we(I) и зависимости М(1) нетрудно рассчитать и построить механическую характеристику для любого Rд (рис. 4.22,6). Из (4.51) при Rz=Rдв +Rд = 0 получается соотношение для расчета граничной характеристик
14. Тормозные режимы работы ДПТПВ. Схемы и механические характеристики.
Для ДПТ с ПВ возможно торможение противовключением и динамическое торможение. В отличии от двигателя с независимым возбуждением у ДПТ с ПВ отсутствует рекуперативное торможение с отдачей энергии в сеть, т. к. его ЭДС не может быть больше приложенного напряжения.
Торможение ДПТ с ПВ противовключением
Как и у двигателя с независимым возбуждением у ДПТ с ПВ возможны:
• торможение с изменением полярности напряжения на обмотке якоря (при обеспечении неизменности направления тока в обмотке возбуждения);
Если у ДПТ с ПВ, работающего в двигательном режиме изменить полярность напряжения на обмотке якоря на противоположную при одновременном переключении концов последовательной обмотки возбуждения, то ток якоря изменит свое направление в соответствии с выражением:
![]() (3.9)
(3.9)
Двигатель переходит в тормозной режим, и его механическая характеристика изображается во 2 квадранте (рис. 3.8).
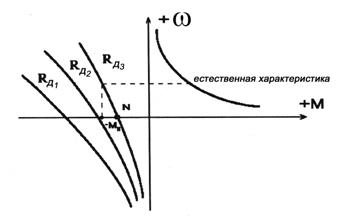
Рис.
3.8 Механические характеристики в режиме
торможения противовключением изменением
полярности подводимого к якорю напряжения
при различных значениях последовательного
добавочного сопротивления
![]() <
<
![]() <
<
![]() .
.
• тормозной спуск.
Этот режим торможения имеет место при превышении активным моментом сопротивления величины пускового момента (или момента короткого замыкания ). В этом случае ток якоря двигателя также определяется по формуле (3.9), т. к. при этом направление вращения, а, следовательно, и знак ЭДС изменяются на противоположные.
Из выражения (3.9), следует, что ток якоря в этом случае превышает значение тока короткого замыкания. Поэтому для реализации данного режима необходимо ограничивать тормозной ток введением последовательного добавочного сопротивления.
Соответствующие механические характеристики тормозного спуска изображаются в 4 квадранте как продолжение характеристик, соответствующих двигательному режиму (рис. 3.9).
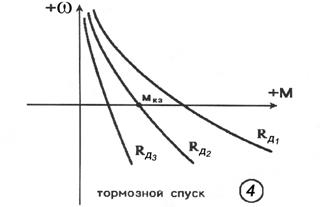
Рис. 3.9 Механические характеристики в режиме тормозного спуска при различных значениях последовательного добавочного
сопротивления < < .
Режим тормозного спуска широко применяется в грузоподъемных механизмах для опускания грузов.
Режим динамического торможения ДПТ с ПВ
Динамическое торможение ДПТ с ПВ возможно реализовать двумя способами:
• с независимым возбуждением;
Оно осуществляется как и у ДПТ с НВ. Обмотка возбуждения отключается от якорной цепи и подключается через токоограничительный резистор к источнику постоянного тока, а якорная обмотка замыкается на тормозное сопротивление (рис. 3.10).
Уравнение
механической характеристики для этого
режима запишется в виде:
![]()
![]()
Ток якоря можно определить как:
![]()
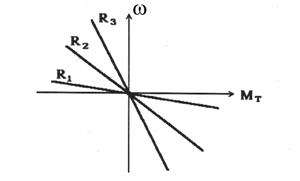
Семейство механических характеристик ДПТ в режиме динамического торможения с независимым возбуждением при различных значениях последовательного добавочного сопротивления
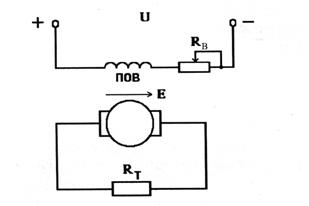
• с самовозбуждением.
R этом режиме якорь ДПТ с ПВ и обмотка возбуждения ПОВ отключаются от сети и подключаются к тормозному сопротивлению согласно схеме, представленной на
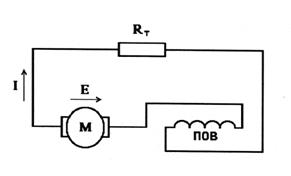
ДПТ с ПВ в этом случае возбуждается для конкретного значения тормозного сопротивления лишь при определенных значениях скорости вращения. Возбудившись, ДПТ с ПВ развивает тормозной момент.
При этом вначале происходит интенсивное самовозбуждение, которое ведет к скачку тормозного момента. Такое ударное, а не «вязкое» торможение для ряда механизмов бывает неприемлемым и это ограничивает применимость данного способа торможения.
Достоинством торможения с самовозбуждением является его экономичность. Двигатель в этом случае не потребляет энергию из сети.