

4. Комплектные электроприводы
Прогрессивным явлением при создании средств управления и автоматизации технологических процессов является разработка и выпуск комплектных ЭП (КЭП) постоянного и переменного тока. КЭП представляют собой регулируемый ЭП, в состав которого входят функциональные элементы, согласованные по всем техническим и конструктивным характеристикам и параметрам [3, 9, 11, 13].
Распространение КЭП определяется более низкой трудоемкостью при его разработке и изготовлении, сокращении времени на электромонтажные и наладочные работы, удобством эксплуатации.
КЭП различают по следующим техническим признакам:
- напряжению питающей сети;
- числу двигателей (одно-, двух- или многодвигательные);
- виду преобразователя;
- наличию реверса;
- виду основной регулируемой координаты;
- диапазону регулирования скорости;
- составу аппаратуры силовой цепи;
- наличию торможения;
- способу связи с питающей сетью.
Комплектный электрический привод постоянного тока
Наибольшее распространение получил КЭП постоянного тока. Он характеризуется широкой номенклатурой, и в его состав входят:
- ДПТ с тахогенератором;
- тиристорные преобразователи для питания обмотки возбуждения и якоря;
- силовой трансформатор или реактор;
- коммутационная и защитная аппаратура;
- устройство динамического торможения;
- схема управления ЭП;
- блоки питания обмотки возбуждения тахогенератора и электромагнитного тормоза;
- комплект аппаратов, приборов и устройств для управления и контроля состояния ЭП.
Электротехнической промышленностью выпускаются несколько серий КЭП постоянного тока. Например, комплектные электроприводы серии КТЭУ, обладающие широким спектром функциональных возможностей. Они выпускаются в одно- и многодвигательном вариантах реверсивного и нереверсивного исполнения как с динамическим торможением, так и без него. КТЭУ мощностью до 2000 кВт обеспечивают регулирование скорости, положения, ЭДС, мощности и натяжения; а КТЭУ мощностью до 12000 кВт – только регулирование скорости и мощности. На основе этих КЭП могут быть реализованы ЭП и со специальными характеристиками.
Функциональная схема кэп серии ктэу приведена на рис3.1.
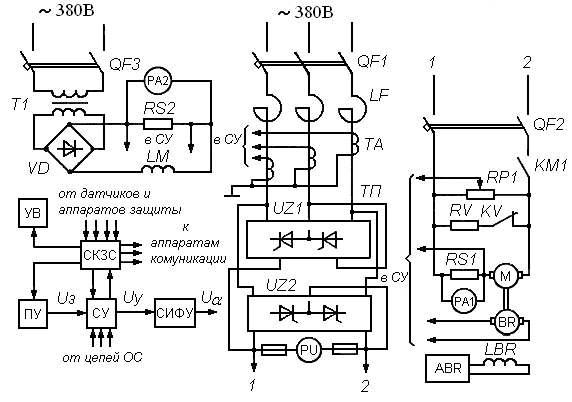
Рис.3.1. Функциональная схема комплектного электропривода типа КТЭУ
В силовую часть КЭП входят два комплекта управляемых выпрямителей UZ1 и UZ2 реверсивного тиристорного преобразователя ТП, обеспечивающего работу двигателя. Подключаются ЭП к сети переменного тока напряжением 380В автоматическим выключателем QF1 через реактор LF (первый вариант) или трансформатор (второй вариант). Автоматический выключатель QF2 осуществляет коммутацию и защиту силовых цепей выпрямленного тока. Для дистанционного включения цепи якоря по сигналам схемы управления предусмотрен контактор КМ.
Для динамического торможения двигателя используется резистор RV, который подключается к якорю М с помощью контактора KV.
Обмотка возбуждения двигателя LM питается от неуправляемого выпрямителя VD, подключенного к трансформатору Т1. Включение и защита цепи возбуждения осуществляется автоматом QF3. Для КТЭУ на номинальные токи якоря свыше 320А обмотка возбуждения питается от управляемого выпрямителя.
Для формирования требуемых статических характеристик в схеме КЭП предусмотрены обратные связи по скорости, току и напряжению. Обратная связь по скорости реализуется с помощью тахогенератора BR, имеющего обмотку возбуждения LBR. Коэффициент усиления обратной связи может регулироваться за счёт изменения (с помощью блока питания ABR) тока возбуждения тахогенератора.
Сигналы, пропорциональные току двигателя, снимаются с трансформатора тока ТА (переменный ток) и шунта RS1 (выпрямленный ток). Сигнал обратной связи по напряжению снимается с потенциометра RP1.
Сигналы обратных связей по координатам ЭП и технологическим параметрам рабочей машины поступают на вход системы управления (СУ) вместе с сигналами задания с пульта управления (ПУ). На основании этих входных сигналов СУ вырабатывает управляющий сигнал Uу, подаваемый на СИФУ тиристоров преобразователей UZ1 и UZ2, а также осуществляет управление электрическими аппаратами, входящими в состав схемы коммутации, защиты и сигнализации (СКЗС).
СКЗС является блоком, который обеспечивает коммутацию электрических цепей ЭП и выполнение функций защиты и сигнализации. Получая информацию от различных датчиков и аппаратов защиты, СКЗС выдаёт на пульт ПУ двухуровневые логические сигналы о положении коммутационных аппаратов, величине скорости ЭП и т.д. СКЗС управляет также работой блока питания электромагнитного тормоза YB.
Для получения информации о токах якоря и возбуждения ЭД в схеме используются соответственно амперметры РА1 и РА2, подключенные к шунтам RS1 и RS2. Для контроля подаваемого на якорь напряжения служит вольтметр PU.
Комплектные электроприводы серии ЭКТ и КТЭ имеют примерно такие же возможности, что и КТЭУ. Для привода станков и роботов разработана группа КЭП серии ЭТУ 3601, ЭТ3, ЭТ6, ЭТРП, ЭПУ1, ЭПУ2, ПРП, ЭШИР-1.В этих КЭП применяются высокомоментные двигатели типов ПБСТ, ПГТ, ПБВ, ДК1, обеспечивающие высокие динамические показатели работы.
Схемы управления большинства станочных КЭП построены по принципам подчиненного регулирования координат с регуляторами тока и скорости.
Комплектный электропривод переменного тока
Номенклатура КЭП переменного тока значительно уже постоянного. В качестве примера можно назвать КЭП серий ЭКТ и ЭКТ2 мощность от 19 до 66 кВ·А, привод серии «Размер 2М» применяют в станках с ЧПУ.
Интегрированный электрический привод
В последнее время стали применяться ЭП, в которых в одну конструкцию объединены двигатель, механическая передача, датчики координат, а иногда и силовой преобразователь. Такой модуль, называемый мехатронным, позволяет получить высокие технико-экономические показатели работы ЭП и технологического оборудования.