

2.3.4. Устройства ограничения токов в переходных режимах
В системах подчиненного регулирования, так же как и в системах с суммирующим усилителем для ограничения токов и напряжений в переходных режимах, возможно использование задержанных нелинейных обратных связей, но в этом случае появляются дополнительные контуры, что нежелательно. Поэтому на практике используют последовательные ограничители и задатчики интенсивности.
Задатчик интенсивности
При резком изменении задания в системе происходит форсировка сигнала управления и, как следствие, скачки тока и момента. Для того чтобы избежать этих неприятных явлений, используют задатчики интенсивности (рис. 2.20).
Их цель - обеспечить плавное изменение сигнала, без скачков, при любом изменении сигнала на входе. Обычно такие задатчики имеют линейную характеристику (рис.2.20).
В данном случае
(рис.2.20,а) ток заряда или разряда
конденсатора
![]() включенного в цепь коллектор-база
транзистора
включенного в цепь коллектор-база
транзистора
![]() остается постоянным в широких пределах
действующего на входе напряжения
остается постоянным в широких пределах
действующего на входе напряжения
![]() .
Напряжение же на выходе меняется линейно
со временем:
.
Напряжение же на выходе меняется линейно
со временем:
![]() .
Темп нарастания напряжения на выходе
определяется регулируемым резистором
в цепи эмиттера.
.
Темп нарастания напряжения на выходе
определяется регулируемым резистором
в цепи эмиттера.
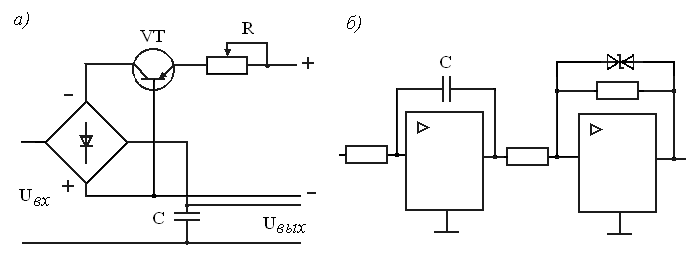
Рис.2.20. Схемы задатчика интенсивности
Для обеспечения неизменной полярности на коллекторе транзистора введены диоды, включенные по мостовой схеме. В таком задатчике интенсивности входной сигнал может меняться произвольно, а выходной меняется только линейно. При этом входной сигнал определяет лишь установившееся значение выходного.
В системе подчиненного регулирования для реализации такого задатчика обычно используют два операционных усилителя, один из которых работает как интегратор, а другой как последовательный ограничитель (рис. 2.20,б).
Последовательные ограничители
Когда необходимо ограничить какие-то параметры внутри схемы, обычно используются различного вида последовательные ограничители.
Например (рис.2.21),
с помощью резистора
![]() можно изменять ограничение напряжения
на выходе регулятора скорости. На
практике, когда нет необходимости
изменять величину, ограничивающую
напряжение на выходе, ограничение
напряжения достигается за счет включения
специально подобранных стабилитронов
в цепь обратной связи регулятора
(рис.2.21,б).
можно изменять ограничение напряжения
на выходе регулятора скорости. На
практике, когда нет необходимости
изменять величину, ограничивающую
напряжение на выходе, ограничение
напряжения достигается за счет включения
специально подобранных стабилитронов
в цепь обратной связи регулятора
(рис.2.21,б).
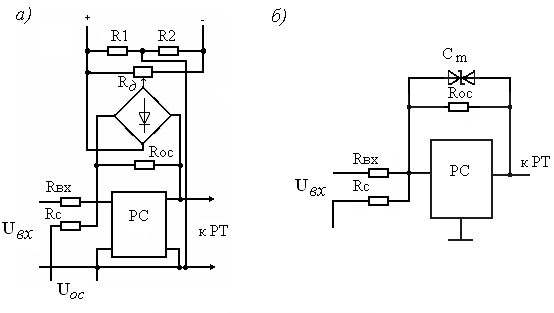
Рис.2.21. Схемы последовательного ограничителя
Реализация систем подчиненного регулирования
Реализация систем подчиненного регулирования осуществляется с использованием элементов универсальной блочной системы регулирования (УБСР). В ней предусмотрены как аналоговые (УБСР-АИ), так и дискретные (УБСР-ДИ) блоки, которые выполняются на интегральных микросхемах. Эта серия элементов рассчитана на унифицированный электрический сигнал ±10 В, ±5 мА.
Применение УБСР позволяет создавать цифро-аналоговые системы, которые широко используются в следящих приводах. В таких системах обычно внутренние контуры тока и скорости делаются аналоговыми, а наружный контур положения - цифровым.