

15)Состав структуры рычажных механизмов по Ассуру. Виды структурных групп и первичных механизмов
Для решения задач анализа и синтеза рычажных механизмов профессо-
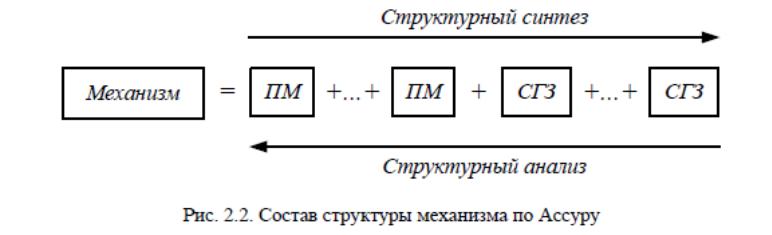
ром Л. В. Ассуром была предложена оригинальная структурная классифика-
ция, согласно которой механизмы, не имеющие избыточных связей и мест-
ных подвижностей, состоят из первичных (элементарных) механизмов и
структурных групп звеньев (рис. 2.2).

Первичный механизм (ПМ) – это элементарный механизм, состоящий
из подвижного и неподвижного звеньев, которые образуют кинематическую
пару с одной или несколькими подвижностями (рис. 2.3).
Структурная группа звеньев (СГЗ) – это кинематическая цепь, образо-
ванная подвижными звеньями механизма, подвижность которой в простран-
стве и на плоскости равна нулю в любой момент времени, и не распадающая-
ся на более простые цепи, обладающие подобными свойствами
(рис. 2.4., рис.2.5., рис.2.6).
где с.г W , с.г n – подвижность и число подвижных звеньев структурной груп-
пы; p1, p2 – число кинематических пар соответствующей подвижности.
Особенностью структурных групп является их статическаянеопреде-
лимость. Если структурную группу свободными элементами звеньев присое-
динить к стойке, то образуется статически неопределимая ферма. Используя
данное свойство структурных групп, удобно проводить структурный, кине-
матический и силовой анализ механизмов. Во всех структурных группах ко-
нечные звенья водят в состав только одной кинематической пары и имеют
свободный элемент звена. Подобные звенья называются поводки.
Поводок – это конечное звено структурной группы, одним элементом
входящее в состав одной кинематической пары и имеющее второй свобод-
ный элемент звена.
Структурные группы могут быть образованы только четным количест-
вом подвижных звеньев (см. рис. 2.4−2.6). Степень сложности структурной
группы характеризуется ее классом. Класс структурной группы определяется
количеством звеньев и кинематических пар с учетом числа вершин наиболее
сложного звена. Сложность структурных групп определяет класс механизма.
Соответственно, класс механизма определяется классом наиболее сложной
структурной группы, входящей в его состав. В пределах класса структурные
группы подразделяются на порядки. Порядок структурной группы соответст-
вует числу поводков.
В структуре рычажных механизмов наиболее часто встречаются струк-
турные группы, состоящие из двух звеньев (2 и 3) и трех кинематических пар
пятого класса (рис. 2.4). Данные структурные группы содержат два подвиж-
ных звена, имеющих по две вершины, что соответствует второму классу.
Структурные группы второго класса имеют не менее двух поводков, что сви-
детельствует о присутствии внутри класса нескольких порядков. В настоящее
время наибольшее распространение получили структурные группы второго
класса второго порядка, характерной особенностью которых является нали-
чие пяти видов (рис. 2.4).
16) Виды структ групп 2-го класса. Примеры.
Вид структурной группы определяется ее структурной формулой, ко-
торая составляется в зависимости от вида и класса кинематических пар.
Структурная группа второго класса второго порядка (рис. 2.4, а) образована
двумя звеньями, двумя поводками и содержит три вращательных пары пято-
го класса, имеет структурную формулу ВВВ, что соответствует первому ви-
ду. Второй вид группы второго класса второго порядка (рис. 2.4, б) получает-
ся путем замены одной из крайних вращательных кинематических пар по-
ступательной парой пятого класса. Структурная формула полученной группы
будет иметь вид ВВП или ПВВ.

Третий вид структурной группы второго класса второго порядка
(рис. 2.4, в) имеет структурную формулу ВПВ и образуется вследствие замены
средней вращательной кинематической пары поступательной парой пятого
класса. Четвертый вид групп второго класса второго порядка (рис. 2.4, г) полу-
чается заменой обоих крайних вращательных кинематических пар пятого клас-
са поступательными парами, что соответствует структурной формуле ПВП. За-
мена одной из крайних и средней вращательных кинематических пар поступа-
тельными парами позволяет получить пятый вид группы второго класса второ-
го порядка (рис. 2.4, д), имеющей структурную формулу ППВ или ВПП.
Механизмы, содержащие только структурные группы второго класса,
являются механизмами второго класса.
Теоретически существуют структурные группы и больших классов, од-
нако в силу их малой распространенности в учебном курсе ограничимся
структурными группами второго класса.