

2. Основные определения теории автоматического регулирования.
САР – система автоматического регулирования; САУ – система автоматического управления.
Система – совокупность объектов, отличающаяся от не системы своей целенаправленностью, за которой идут ее свойства. Цель системы задается разработчиком. Для незнающего цели система перестает быть системой..
Всю совокупность целенаправленный действий человека, направленных на удовлетворение своих материальных и духовный потребностей, можно классифицировать на два вида операций:
1) рабочие операции – действия, непосредственно необходимые для выполнения процесса в соответствии с его природными законами и особенностями.
2) операции управления – действия, сопровождающие рабочие операции и обеспечивающие их своевременное начало, порядок следования и прекращения. Кроме того, решаются проблемы выделения ресурсов, определение параметров процессов и т. д.
Совокупность установленных операций называется процессом управления.
Механизация – замена труда человека в рабочих операциях с целью его освобождения от тяжелого рутинного труда.
Автоматизация – замена труда человека в операциях управления.
Совокупность технических устройств (машины, орудия труда, средства механизации), на которые направлены операции управления, называется объектом управления.
Совокупность средств управления и объекта управления образуют систему управления.
Система, в которой все управленческие и рабочие операции выполняются автоматическими устройствами без участия человека, называется автоматической системой.
Система, в которой автоматизирована только часть операций управления, а другая часть (наиболее ответственная – обычно) выполняется людьми, называется автоматизированной (полуавтоматической) системой.
Всякий технический процесс характеризуется совокупностью величин, называемых показателями (координатами, параметрами) процесса.
Н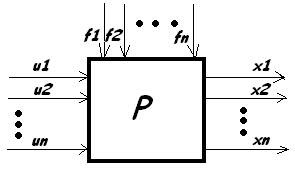 еобходимость
в управлении значениями координат
возникает в том случае, когда нормальный
ход процесса нарушается в результате
различного рода внешних возмущений или
внутренних побочных явлений.
еобходимость
в управлении значениями координат
возникает в том случае, когда нормальный
ход процесса нарушается в результате
различного рода внешних возмущений или
внутренних побочных явлений.
Р – объект. Пусть x = {x1, x2, … , xn} – совокупность управляемых координат (параметров) процесса; f = {f1, f2, … , fn} – возмущение, действующее на объект; u = {u1, u2, …, un} – воздействие (управление), прикладываемое к объекту Р.
Отсутствие одного из векторов говорит о том, что это либо не система, либо идеализированная система.
Векторы x, u, f связаны различными материальными соотношениями, в которых оператор А показывает вид связи:
x = A(u, f) (1) – общий вид, в этом случае объект называется статическим (безынерционным);
x = F(u, f) (2) – функциональная зависимость – статическая характеристика объекта.
В реальной жизни всякий объект обладает массой и поэтому является динамическим. Под действием внешних сил со стороны объекта возникает соответствующая реакция, и его положение (состояние) не может быть изменено мгновенно. Переменные x, u, f в динамических объектах обычно связаны между собой дифференциальными, интегральными и разностными уравнениями, содержащими в качестве независимой переменной время t.
Совокупность правил, предписанных или математически зависимых изменений координат объекта в том или ином процессе, называется алгоритмом функционирования системы.
Требуемый закон изменения управления u называется алгоритмом управления – он показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования.