

31. Классификация адаптивных систем.
Обычно выделяют два вида классификации адаптивных систем.
1) Содержательная – выделяют классы систем, различающихся содержанием или видом устраняемых неопределенностей. Примером может являться классификация адаптивных систем (АС) с управляемыми сведениями о моменте времени.
2) Структурная – системы классифицируются по способу подключения дополнительных контуров, по их количеству. Часто возникает ситуация, когда недостаточно одного дополнительного контура. В этом случае может быть использовано несколько контуров и их различные варианты подключений.
![]() 2.1)
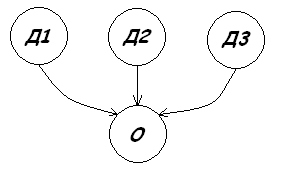
Класс простейших АС.
2.1)
Класс простейших АС.
Такие системы предназначены для работы с одним видом неопределенностей.
Ранг рефлексии = 2.
«О» – основной контур
«Д» – дополнительный контур
2.2) Класс многоконтурных АСУ линейного уровня
В данном случае применяется параллельное соединение дополнительных (адаптирующих) контуров.
Ранг рефлексии = 2, но система при этом может работать сразу с несколькими видами неопределенностей
Существенным недостатком систем типа 2.1 и 2.2 является нарушение работы при отключении дополнительного контура.
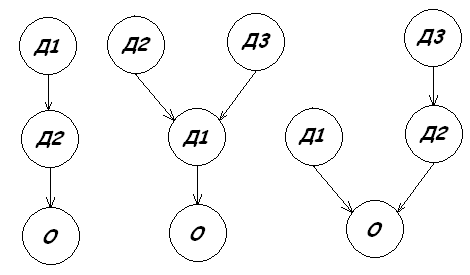
2.3) Класс многоконтурных АС высокого уровня управления.
В приведенных примерах ранг рефлексии = 3.
Необходимо учитывать, что с увеличением ранга рефлексии в разы увеличивается сложность и стоимость системы
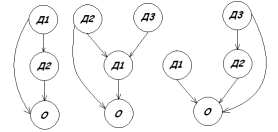
2.4) Класс АС транзитивного типа
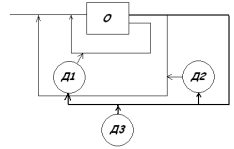
2.5) Класс гомеостатических АС.
В структурном плане эти системы отличаются тем, что два дополнительных контура управления имеют общий объект и в свою очередь находятся под управлением третьего контура.
32.Развитие систем управления в виде групповой адаптации.
Под автономной системой управления понимается такая система, которая способна при благоприятных условиях самостоятельно выполнять свои функции, т. е. можно сказать, что каждая система имеет свою цель.
Группой называется насколько автономных систем, объединенных необходимостью достижения общей цели.
Автономная система является целенаправленным объектом и способна в адаптации.
Адаптация группы происходит по трем основным направлениям:
1) Расширение состава автономных систем в группе
2) Углубление уровня рефлексии в группе
3) Углубление уровня рефлексии каждой автономной системы в группе.
Классы
систем, автономно достигающих простых
целей управления:![]()
а) Такие группы не объединены ничем кроме общей задачи, которая выполняется лишь за свет совместного выполнения каждым своего дела. Такую группу даже нельзя назвать адаптивной.
б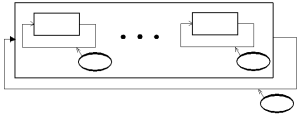 )
Группы простых автономных систем под
общим для группы управлением с простой
целью.
)
Группы простых автономных систем под
общим для группы управлением с простой
целью.
В такой группе объектом управления являются отношения между автономными системами. При этом возможные изменения ситуации не учитываются. Автономные системы выполняют четко сформулированные задания, которые являются частями общей для группы задачи. Целиком задача группы известна только одному «руководителю» – контуру управления верхнего уровня.

в) Класс индивидуальных адаптируемых систем в группе
Эта группа не объединяет индивидуумов общей целью, т. е. нет групповой рефлексии. Следовательно, такие группы максимально неустойчивы к внешним воздействиям

г) Группа адаптивных автономных систем под общим управлением
Такое управление плохо приспособлено к адаптации. В основном предназначено для манипуляции индивидуальными способностями членов группы. Такие группы также не очень устойчивы.
д) Группа автономных адаптивных систем под управлением с адаптацией на уровне группы