

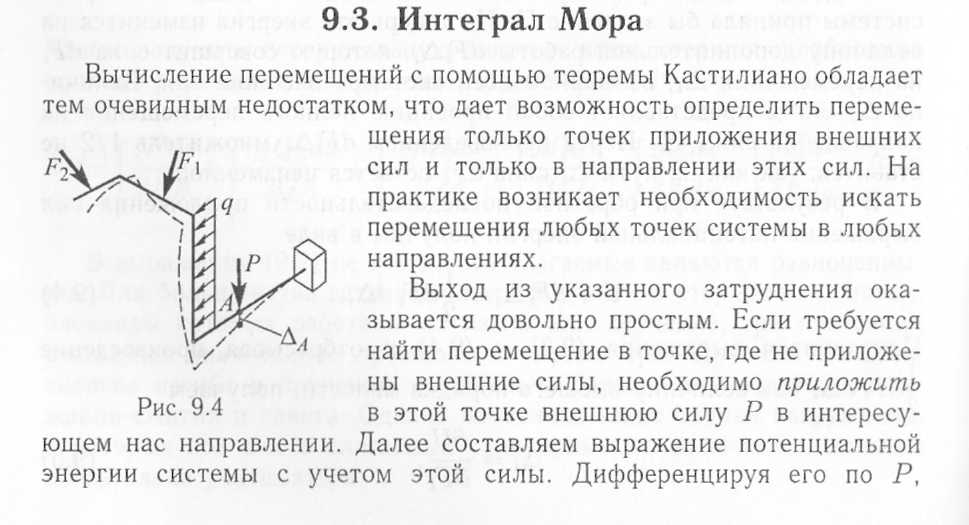
Определение перемещений методом интеграла Мора.
![]()
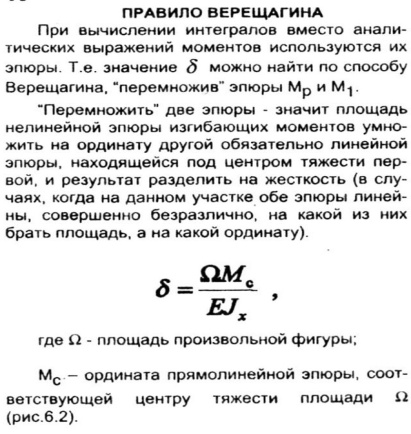
Правило Верещагина.
51. Формула Cимпсона, Мюллера-Бреслау.
Формула Симпсона: в общем случае сложных эпюр для вычисления интеграла Мора удобно использовать формулу Симпсона – одну из самых распространенных квадратных формул. Интеграл от функции f(z) можно приближенно вычислить по Симпсону следующим образом:
Эта формула основана на аппроксимировании – замене подынтегральной функции квадратной параболой, проходящей через крайние и среднюю ординаты f(a), f(b), f(c). Формула Симпсона для вычисления интеграла Мора га участках постоянной жесткости является точной, если обе функции f1(z), f2(z) линейные или одна из них линейная, а вторая квадратичная.
52. Основы метода сил.
Этот метод широко используется для расчета статически неопределенных стержневых систем. Последовательность расчета неопределенной системы по методу сил следующие:
1. определяется степень статической неопределенности путем подсчета лишних связей.
2. выбирается основная система метода сил, которая получается из заданной системы после удаления лишних связей. Удаленные связи заменяются лишними неизвестными усилиями, возникающими в этих связях.
3. составляются уравнения перемещений, которые выражают условия совместимости перемещений основной системы с заданной, статически неопределенной системой. Если перемещение в основной системе по направлению отброшенных связей в основной системе должны быть = 0, то уравнения перемещений выражают равенство нулю этих перемещений.
4. полученная система канонических уравнений является системой линейных алгебраических неоднородных уравнений и она решается каким – либо методом (например: метод Гаусса).
5. после определения значений лишних неизвестных усилий, определяют внутренние силовые факторы в элементах конструкций статически неопределенной системы на основе метода сечений. Если степень статической неопределенности равно n, то система канонических уравнений выглядит:
53. Матрица податливости. Механический смысл коэффициентов матрицы податливости, приемы вычисления коэффициентов.
В расчетах на прочность и жесткость статически неопределимых систем широко используются метод сил и метод перемещений. Напомним, что для определения внутренних усилий в статически неопределимых системах недостаточно лишь уравнений статики: требуется составлять дополнительные уравнения деформаций (перемещений). Причем, если степень статической неопределимости невысока, то предпочтение обычно отдают первому методу, в противном случае - второму.
Канонические уравнения метода сил (название указывает на то, что они составляются по определенному правилу - канону), в развернутом виде записываются так :
δ11X1 + δ12X2+...+δ1nХп +∆1f =0;
δ2lXl+δ22X2 +...+δ2nXn+∆2f=0;
………………………………….
δ nlXl + bn2X2 +... + bnnXn + ∆nf = 0,
а в векторно-матричной форме
[δ]{X} + {∆f} = {0},
г![]() де
квадратная матрица коэффициентов [δ]
называется матрицей
податливости конструкции.
Она оказывается весьма удобной для
описания упругих свойств конструкции,
моделируемой в динамических расчетах
системой с конечным числом степеней
свободы. Коэффициент δij
представляет
собой перемещение (линейное или угловое)
по направлению i,
вызванное силовым фактором (безразмерной
силой или моментом соответственно),
равным единице и действующим в направлении
j.
Очевидно,
что эти коэффициенты можно определить
по методике: предварительно строим
эпюры изгибающих моментов Mt
от единичных
силовых факторов, действующих по
направлениям, предоставленным степенями
свободы системы. Количество эпюр равно
и, т.е. по числу степеней свободы. Значение
коэффициента δij
получается путем перемножения эпюр Мi
и Mj.
При постоянной жесткости (изгибной, на
кручение и т.п.) отдельных участков
конструкции целесообразно использовать
способ Верещагина. В общем случае для
плоских систем необходимо применять
формулу Мора, удерживая в ней все три
слагаемых или некоторые из них, в
зависимости от требуемой точности
решения. В динамических задачах
{X}T={X1,….
Хп}Т
- вектор-столбец
внешних силовых факторов, {∆f}T
= {∆1f,…
∆nf}T-
вектор-столбец перемещений; Т - знак
транспонирования, использован для
удобства записи столбцов в виде строк;
соответственно Xi
- i-й
силовой фактор, а ∆ij
- перемещение в направлении i-й
степени свободы, вызванное действием
заданной нагрузки. В задачах статического
расчета статически неопределимых
систем Xi
- реакция в
i-й
связи, ∆if
- перемещение по направлению связи i,
а механический смысл уравнений -
отсутствие (отрицание) перемещений
по направлениям жестких связей.
де
квадратная матрица коэффициентов [δ]
называется матрицей
податливости конструкции.
Она оказывается весьма удобной для
описания упругих свойств конструкции,
моделируемой в динамических расчетах
системой с конечным числом степеней
свободы. Коэффициент δij
представляет
собой перемещение (линейное или угловое)
по направлению i,
вызванное силовым фактором (безразмерной
силой или моментом соответственно),
равным единице и действующим в направлении
j.
Очевидно,
что эти коэффициенты можно определить
по методике: предварительно строим
эпюры изгибающих моментов Mt
от единичных
силовых факторов, действующих по
направлениям, предоставленным степенями
свободы системы. Количество эпюр равно
и, т.е. по числу степеней свободы. Значение
коэффициента δij
получается путем перемножения эпюр Мi
и Mj.
При постоянной жесткости (изгибной, на
кручение и т.п.) отдельных участков
конструкции целесообразно использовать
способ Верещагина. В общем случае для
плоских систем необходимо применять
формулу Мора, удерживая в ней все три
слагаемых или некоторые из них, в
зависимости от требуемой точности
решения. В динамических задачах
{X}T={X1,….
Хп}Т
- вектор-столбец
внешних силовых факторов, {∆f}T
= {∆1f,…
∆nf}T-
вектор-столбец перемещений; Т - знак
транспонирования, использован для
удобства записи столбцов в виде строк;
соответственно Xi
- i-й
силовой фактор, а ∆ij
- перемещение в направлении i-й
степени свободы, вызванное действием
заданной нагрузки. В задачах статического
расчета статически неопределимых
систем Xi
- реакция в
i-й
связи, ∆if
- перемещение по направлению связи i,
а механический смысл уравнений -
отсутствие (отрицание) перемещений
по направлениям жестких связей.
![]()
![]()