

39. Оптический датчик. Щелевой оптрон.
В качестве оптических датчиков чаще всего выступает оптопара со светодиодом и фотоприемником.
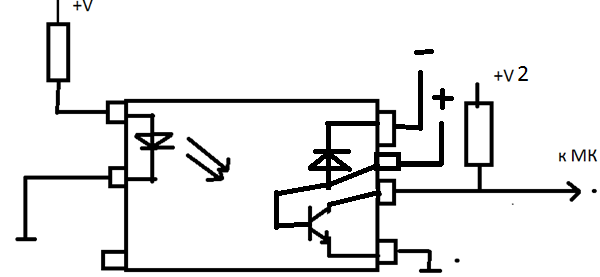
Щелевой оптрон:

Фототранзистор и направленный на него светодиод закреплены между собой так что растровая пластина в зазоре перекрывает между ними свет. Щелевые оптроны чаще всего используются для простейшего измерения скорости (без опред направления вращения).
Щел оптроны использ для опред: открыт-закрыт кожух робота.
Прим. Механич комп мышь использует оптрон
40. Отражательный оптрон. Оптрон с закрытым оптическим каналом.
Герметически упакован
Д ве
части находятся под разными потенциалами,
разность между которыми может достигать
десятки или сотни вольт.
ве
части находятся под разными потенциалами,
разность между которыми может достигать
десятки или сотни вольт.
Отдел с закрытым каналом представляет собой герметичный корпус для предотвращения прерывания светового потока. Такие оптроны чаще всего примен для изоляции цепи с высоким напряжением от управляющих цепей.
На рис показ как оптрон примен для микропроц управления.
Мощные устр-ва (ЭД с ШИМ упр) могут создавать помехи на управляющих цепях. В таких случаях оптроны служат для предовращ проникновения помех через землю в логич блоки.
Некоторые оптроны для примен в микропроц сист оснащ на выходе формирователем логических уровней. Данный формирователь также размещ в одном корпусе.
Ч аще
всего для управл микропроц и ПЛК использ
оптроны серии 4N-35,
кот имеют время вкл/выкл порядки 10мксек
с частотой 10кГц. При увеличении скорости
переключения выходной сигнал будет
сильно отлич от входного. След при
большей скорости перед использ оптроны:
6N-36
аще
всего для управл микропроц и ПЛК использ
оптроны серии 4N-35,
кот имеют время вкл/выкл порядки 10мксек
с частотой 10кГц. При увеличении скорости
переключения выходной сигнал будет
сильно отлич от входного. След при
большей скорости перед использ оптроны:
6N-36
Такой оптрон работает на частоте до 1МГц. В этом оптроне, чтобы достичь высокой скорости в схему включ фотодиод последовательно с выходным транзистором.
41. Энкодеры. Принцип действия. Квадратурный энкодер.
Ч
 аще
всего при применении электродвигателей
с бесконтактными «ЭД» типа «БДПТ» ( как
правило в комплекте с ними) эти «ЭД»
управляются по обратной связи по скорости
через энкодеры, закреплённые на оси
«ЭД». Назначение энкодера – это передать
информацию по позиции осей. На данном
примере 4 магнита располагаются
симметрично вокруг оси вала «ЭД», а на
корпус крепится Датчик Холла. Следовательно,
Датчик Холла за один оборот вала «ЭД»
будет формировать четыре импульса.
Следует заметить, что четыре импульса
за один оборот вполне достаточно для
регулирования скорости с низкой
разрешающей способностью (вентиляторы,
насосы и т.д.). При использовании
«мотор-редуктор» датчик всё равно
устанавливается на «ЭД», а не на редукторе.
При измерении скорости вращения двигателя
с высокой точностью нужно использовать
оптический энкодер.На
примере, изображённом слева, показан
простой оптический энкодер. На стеклянный
диск нанесены непрозрачные метки (от
16 и выше). Диск устанавливают на ось
«ЭД»,
а край его помещают в щелевой оптический
датчик. При каждом пересечении датчика
меткой, фототранзистор закрывается и
оптический датчик формирует импульс.
Следовательно, датчик вырабатывает то
количество импульсов за один оборот,
количество которых меток нанесено на
диске. Этот датчик более точно определяет
угол поворота «ЭД» и число оборотов.
Эти два типа энкодеров (описанные выше)
имеют один недостаток: по выходным
величинам нельзя определить направление
вращения «ЭД». Рассмотрим другой вид
энкоднра, называемый квадратурным.
аще
всего при применении электродвигателей
с бесконтактными «ЭД» типа «БДПТ» ( как
правило в комплекте с ними) эти «ЭД»
управляются по обратной связи по скорости
через энкодеры, закреплённые на оси
«ЭД». Назначение энкодера – это передать
информацию по позиции осей. На данном
примере 4 магнита располагаются
симметрично вокруг оси вала «ЭД», а на
корпус крепится Датчик Холла. Следовательно,
Датчик Холла за один оборот вала «ЭД»
будет формировать четыре импульса.
Следует заметить, что четыре импульса
за один оборот вполне достаточно для
регулирования скорости с низкой
разрешающей способностью (вентиляторы,
насосы и т.д.). При использовании
«мотор-редуктор» датчик всё равно
устанавливается на «ЭД», а не на редукторе.
При измерении скорости вращения двигателя
с высокой точностью нужно использовать
оптический энкодер.На
примере, изображённом слева, показан
простой оптический энкодер. На стеклянный
диск нанесены непрозрачные метки (от
16 и выше). Диск устанавливают на ось
«ЭД»,
а край его помещают в щелевой оптический
датчик. При каждом пересечении датчика
меткой, фототранзистор закрывается и
оптический датчик формирует импульс.
Следовательно, датчик вырабатывает то
количество импульсов за один оборот,
количество которых меток нанесено на
диске. Этот датчик более точно определяет
угол поворота «ЭД» и число оборотов.
Эти два типа энкодеров (описанные выше)
имеют один недостаток: по выходным
величинам нельзя определить направление
вращения «ЭД». Рассмотрим другой вид
энкоднра, называемый квадратурным.
Д ля
определения направления вращения в
энкодере, так как и в прошлой схеме,
снова используется стеклянный диск с
непрозрачными метками. Но используется
уже два оптических датчика, расположенных
один возле другого. Длинна непрозрачной
метки больше чем расстояние между
датчиками. Кроме того метка, подающая
в датчик «А», формирует высокий логический
сигнал. И, когда метка доходит до датчика
«В», следовательно, на его выходе также
формируется высокий логический
сигнал. Запаздывание в формировании
сигналов и определяет направление
вращения «ЭД». Следовательно, если в
«ЭД» поменять направление вращения,
то первым переключится канал «В», а за
ним канал «А». Такой энкодер – называется
квадратичным. Он представляет полную
информацию о позиции, скорости и
направлении. В среднем, такие энкодеры
формируют до 1000 импульсов за оборот.
ля
определения направления вращения в
энкодере, так как и в прошлой схеме,
снова используется стеклянный диск с
непрозрачными метками. Но используется
уже два оптических датчика, расположенных
один возле другого. Длинна непрозрачной
метки больше чем расстояние между
датчиками. Кроме того метка, подающая
в датчик «А», формирует высокий логический
сигнал. И, когда метка доходит до датчика
«В», следовательно, на его выходе также
формируется высокий логический
сигнал. Запаздывание в формировании
сигналов и определяет направление
вращения «ЭД». Следовательно, если в
«ЭД» поменять направление вращения,
то первым переключится канал «В», а за
ним канал «А». Такой энкодер – называется
квадратичным. Он представляет полную
информацию о позиции, скорости и
направлении. В среднем, такие энкодеры
формируют до 1000 импульсов за оборот.