

5. Оценка помехоустойчивости цифровой системы телемеханики
Требование к помехоустойчивости
проектируемой телемеханической системы
задано вероятностью
![]() трансформации телемеханического
сообщения, характеризующей переход
одной разрешенной кодовой комбинации
в другую, и вероятностью
трансформации телемеханического
сообщения, характеризующей переход
одной разрешенной кодовой комбинации
в другую, и вероятностью
![]() потери телемеханического сообщения.
потери телемеханического сообщения.
Для проектируемой системы можно
определить остаточную вероятность
![]() не обнаруживаемой ошибки и вероятность
не обнаруживаемой ошибки и вероятность
![]() пропуска синхросигнала. При этом
требуемая помехоустойчивость (верность
передачи) обеспечивается, если выполняются
условия:
пропуска синхросигнала. При этом
требуемая помехоустойчивость (верность
передачи) обеспечивается, если выполняются
условия:
![]() , (5.1)
, (5.1)
![]() . (5.2)
. (5.2)
В разработанной системе для повышения помехоустойчивости наряду с избыточным кодированием используется система с решающей обратной связью (РОС). В системах с РОС данные передаются с использованием кодов, обнаруживающих ошибки. Передаваемый фрагмент сообщения передается по прямому каналу связи (ПК) и запоминается на случай повторной передачи. Если на приемной стороне ошибка не обнаружена, то по обратному каналу связи (ОК) передается сигнал подтверждения правильного приема (положительная квитанция), по которому передающая сторона начинает передачу очередного фрагмента данных. В противном случае по ОК передается сигнал переспроса (отрицательная квитанция) и передающая сторона начинает повторную передачу принятого с ошибкой фрагмента по ПК, где N-номер передаваемого блока. В таких системах управление процессом передачи ведется с приемной стороны.
Процесс передачи данных в системе с РОС условно можно представить следующим образом (рис.6).
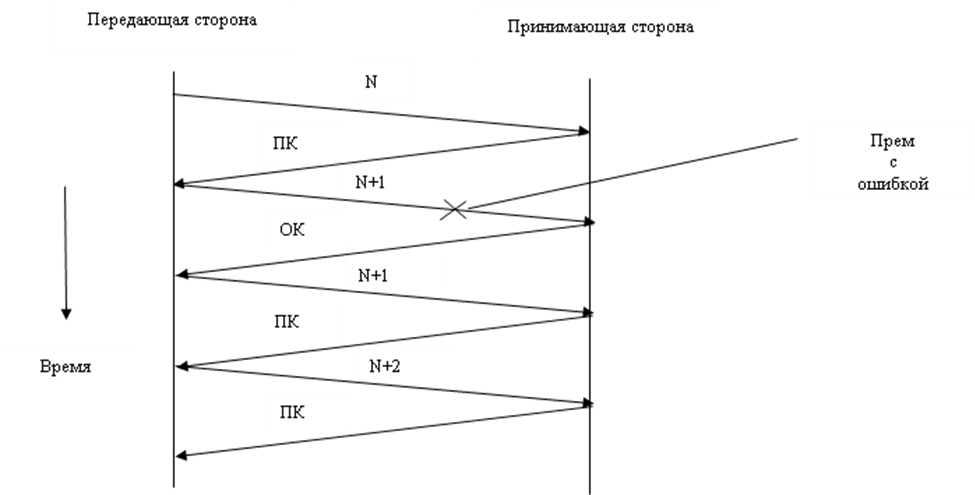
Рис. 6. Процесс передачи данных в системе с РОС
Вероятность
![]() можно определить из графа, описывающего
последовательность событий, происходящих
в системе при передаче информации. Для
рассмотренной системы, в случае
циклического опроса, граф имеет вид,
представленный на рис. 7. Дуги графа
отображают одно из трех сообщений:
правильный прием, прием с необнаруживаемой
ошибкой и прием с обнаруживаемой ошибкой.
Им соответствуют:
можно определить из графа, описывающего
последовательность событий, происходящих
в системе при передаче информации. Для
рассмотренной системы, в случае
циклического опроса, граф имеет вид,
представленный на рис. 7. Дуги графа
отображают одно из трех сообщений:
правильный прием, прием с необнаруживаемой
ошибкой и прием с обнаруживаемой ошибкой.
Им соответствуют:
![]() ,
,![]() - вероятности правильного приёма вызова
и сообщения;
- вероятности правильного приёма вызова
и сообщения;
![]() ,
,![]() - вероятности приёма вызова и сообщения
с необнаруживаемой ошибкой;
- вероятности приёма вызова и сообщения
с необнаруживаемой ошибкой;
![]() ,
,![]() - вероятности приёма вызова и сообщения
с обнаруживаемой ошибкой.
- вероятности приёма вызова и сообщения
с обнаруживаемой ошибкой.
Через i обозначены номер повторной передачи в случае обнаружения ошибки.
Из графа следует, что остаточная вероятность необнаруживаемой ошибки
![]() ,
(5.3)
,
(5.3)

Рис. 7.
где
![]() ,
(5.4)
,
(5.4)
![]() .
.
6. Выбор синхросигнала
Синхросигнал может быть одноэлементным или многоэлементным. Будем использовать одноэлементный синхросигнал.
Для выполнения неравенства (5.2) необходимо обеспечить длительность синхросигнала
![]() ,
(6.1)
,
(6.1)
где – коэффициент удлинения, выбираемый из ряда чисел 2, 3, … ; 0 – длительность элементарного сигнала;
Удлинение синхросигнала увеличивает его энергию, вследствие чего возрастает помехоустойчивость. Значение определяется из соотношения:
 , (6.2)
, (6.2)
где
[х]* – наименьшее целое число,
большее или равное х ; ЕС – энергия
синхросигнала; ЕО – энергия
элементарного сигнала;
![]() – отношение сигнал-помеха для
синхросигнала;
– отношение сигнал-помеха для
синхросигнала;
![]() – отношение сигнал-помеха для элементарного
синхросигнала; NO
– спектральная плотность мощности
помехи.
– отношение сигнал-помеха для элементарного
синхросигнала; NO
– спектральная плотность мощности
помехи.
Величина
![]() определяется по заданному значению
вероятности
потери сигнала из соотношения:
определяется по заданному значению
вероятности
потери сигнала из соотношения:
![]() , где
, где

Для Q(x)=Pпот=10-6 по таблице 2 из [1] находим x = yc = 4.76, затем hc= 6.732.
Величина
![]() определяется по заданному значению
вероятности Р искажения элементарного
сигнала из соотношения:
определяется по заданному значению
вероятности Р искажения элементарного
сигнала из соотношения:
![]() , для вида модуляции АМ коэффициент
0 определяется
[1]
, для вида модуляции АМ коэффициент
0 определяется
[1]
![]() .
.
Для Q(x) = P = 0.0002 по той же таблице находим: x = y0 = 3.54, затем h0=5.01.
В соответствии с выражением (6.2) находим коэффициент удлинения , который мы и будем ассоциировать с длительностью синхросигнала.
Тогда β = ]hc2/h02[ = ]45.32/25.06[ = ]1.808[ = 2.
Длительность синхросигнала составляет 2 в.п. (временных позиции).