Исследование электронного унифицированного регулятора
Целью настоящей работы является исследование унифицированного электронного регулятора РПИК-Т (регулятор пропорционально-интегральный контактный, работающий с датчиком – термопарой); ознакомление с методами его настройки и оценки влияния параметров настройки на характер выходного сигнала регулятора.
Результаты работы
№ опыта |
Длительность импульсов |
Ск. Связи |
Значение R9 |
Первый импульс |
Последующие импульсы |
Пауза |
1 |
5 |
5 |
3 мОм |
16 |
1 |
3 |
2 |
5 |
4 |
3 мОм |
21 |
1 |
1 |
3 |
5 |
6 |
3 мОм |
14 |
1 |
1 |
4 |
4 |
5 |
3 мОм |
16 |
1,5 |
2 |
5 |
6 |
5 |
3 мОм |
14 |
0,3 |
0,3 |
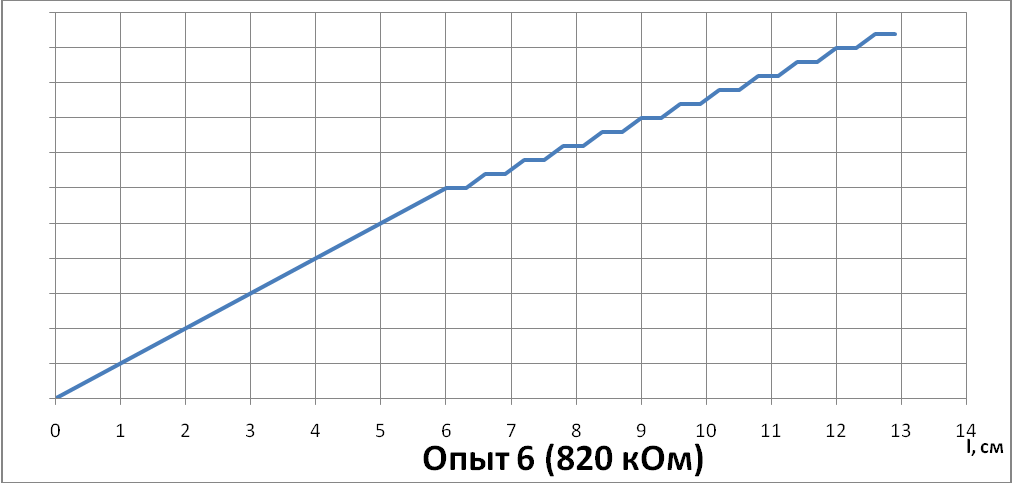
6 |
5 |
5 |
820 кОм |
6 |
0,4 |
0,3 |
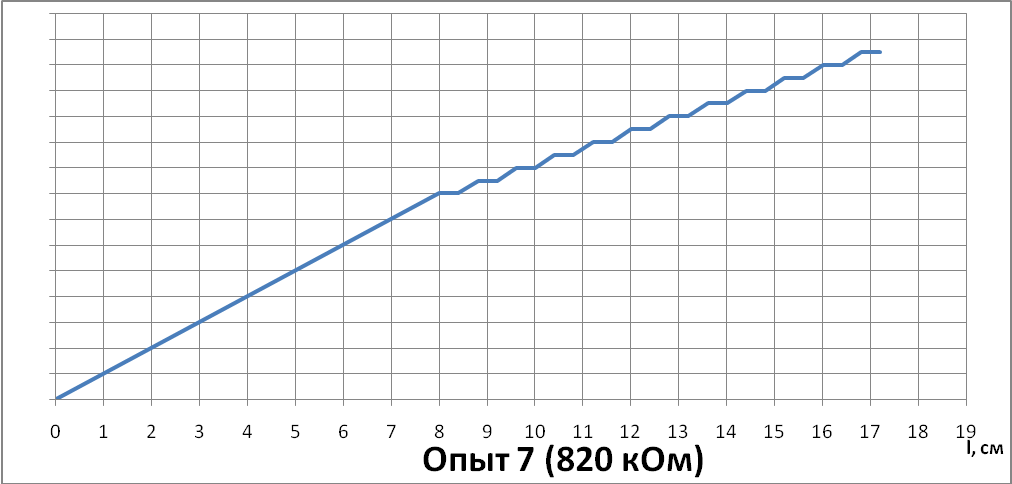
7 |
5 |
4 |
820 кОм |
8 |
0,5 |
0,4 |
8 |
5 |
6 |
820 кОм |
5 |
0,5 |
0,5 |
9 |
4 |
5 |
820 кОм |
7 |
0,6 |
0,6 |
10 |
6 |
5 |
820 кОм |
6 |
0,4 |
0,4 |








Система двухпозиционного регулирования уровня
Целью работы, являются исследование модем системы двухпозиционного автоматического регулирования уровня сыпучего материала, определение влияния параметров системы на процесс автоматического регулирования.
В ряде технологических объектов текстильной промышленности возникает необходимость в стабилизации уровня сыпучих материалов. Так, например, необходимо поддерживать постоянный уровень хлопкового волокна в буккерах трепальных и чесальных машин, так как от постоянства уровня зависит ровнота материала (холста, ленты), получаемого на выходе машины.
Подача волокна в бункер часто осуществляется пневмотранспортом, а отбор (потребление) материала из бункера - рабочими органами машины.
Изменение потребления материала из бункера является возмущающим воздействием, а изменение подачи - регулирующим воздействием.
Бункер, как объект регулирования уровня волокна, может быть описан уравнением:
![]() (1)
(1)
где S - площадь поперечного сечения бункера,
H - уровень волокна,
t - время,
QПОД - интенсивность подачи волокна,
QПОТР- интенсивность потребления волокна.
В качестве датчика уровня в подобных системах широко применяется фотоэлемент в комплекте с источником света, причем используется либо эффект перекрытия светового луча материалом (источник света и фотоэлемент расположены на противоположных стенках буккера), либо эффект отражения луча материалом (источник света и фотоэлемент расположены рядом, на одной стенке бункера). В обоих случаях датчик формирует позиционный сигнал (“да” – “нет”) и потому позволяет реализовать лишь позиционное (обычно двухпозиционное) регулирование. В простейшем случае используется всего один датчик, размещенный на заданном уровне материала.
Если фактический уровень ниже заданного, то обеспечивается подача материала в бункер с интенсивностью QПОД, непременно большей чем, максимально возможное. При этом происходит повышение уровня материала со скоростью:
![]() (2)
(2)
Если фактический уровень выше заданного, то подача материала отсутствует (QПОД=0) и происходит понижение уровня материала со скоростью:
![]() (3)
(3)
В этом случае реализуется зависимость регулирующего воздействия от регулируемой величины, показанная на рис. 1, где:
НЗД – заданное значение уровня

Эта зависимость характеризует двухпозиционное регулирование без зоны возврата: регулирующее воздействие Qпод имеет два фиксированных значения, причем переход с одного значения на другое происходит скачком при одном и том же значении уровня как в прямом, так и в обратном направлении (при подъеме и понижении уровня).
Возможны и другие варианты формирования регулирующего воздействия (требующие использования двух датчиков уровня), которые в данной работе не рассматриваются.
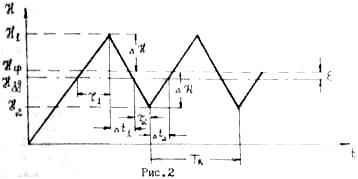
При двухпозиционном регулировании система неизбежно работает в автоколебательном режиме, т.е. регулируемая величина постоянно колеблется в окрестности Нзд (рис.2). Амплитуда колебаний ∆Н, их период Тк и смещение Ɛ среднего значении колебаний Нср. В относительно заданного Нзд будут определяться параметрами объекта в регуляторе. Параметрами объекта в рассматриваемом случае можно считать S и Qпотр, а к параметрам регулятора кроме Qпод следует отнести имеющее, как правило, место запаздывание в формировании регулирующего воздействия после возникновения того или иного сигнала датчика. Действительно, при использовании, например, пневмотранспорта, подача волокна не монет ни начаться, ни прекратиться мгновенно, в момент изменения состояния датчика, вентиляторы имеют время разгона и время выбега. Запаздывания в прекращении подачи волокна, τ1 и в начале подачи волокна τ2. показаны на рис,2.
Скорость подъема
уровня ![]() определяется формулой (2), а скорость
понижения уровня
определяется формулой (2), а скорость
понижения уровня ![]() -
формулой (3). Тогда имеем:
-
формулой (3). Тогда имеем:
![]() , (4)
, (4)
 , (5)
, (5)
![]() , (6)
, (6)
Δ ,
(7)
,
(7)
Отсюда нетрудно получить:
![]() , (8)
, (8)
![]() , (9)
, (9)
 , (10)
, (10)
Использование в
приведённых выше формулах скоростей
подъёма уровня
и понижения уровня ![]() удобно
для расчётов проводимых в данной работе.
удобно
для расчётов проводимых в данной работе.

Рис.3 - Электрическая схема стенда
Циклограмма, поясняющая работу схемы автоматики, приведена на рис.4. Реле К1 включено при освещенном ФСК. При включении К1 запускается реле времени РВ1, а при отключении К1 запускается реле времени РВ2. Выключение РВ1 вызывает срабатывание К2, а выключение РВ2 вызывает отпускание К2. При выключенном К2 платформа движется вверх, а при включенном К2 – вниз.

РВ1 РВ2 |
Настройки стенда |
Характеристики системы |
Характеристики автоколебательного режима |
|||||||||||
Эксперимент |
Расчетные |
|||||||||||||
Uв, В |
Uн, B |
τ1, c |
τ2, c |
dH/dt|+ |
dH/dt|- |
Qпод м³/c |
Qпотр м³/c |
ΔH, мм |
ε, мм |
Tк, с |
ΔH, мм |
ε, мм |
Tк, с |
|
I-I |
22 |
22 |
|
|
2,95 |
2,68 |
0,28 |
-2,68 |
|
|
|
|
|
|
24 |
22 |
|
|
3,06 |
3,33 |
-0,27 |
-3,33 |
|
|
|
|
|
|
|
26 |
22 |
|
|
3,35 |
3,28 |
0,08 |
-3,28 |
|
|
|
|
|
|
|
28 |
22 |
|
|
3,74 |
3,62 |
0,12 |
-3,62 |
|
|
|
|
|
|
|
I-I |
22 |
22 |
3,18 |
3,28 |
2,52 |
2,44 |
0,08 |
-2,44 |
4 |
2 |
12,92 |
8,00 |
0,0052 |
12,92 |
22 |
28 |
3,4 |
4,4 |
3,53 |
2,73 |
0,80 |
-2,73 |
6 |
2 |
15,6 |
12,00 |
-0,0498 |
15,60 |
|
28 |
22 |
3,24 |
2,86 |
2,47 |
2,80 |
-0,33 |
-2,80 |
4 |
1 |
12,2 |
8,00 |
-0,0026 |
12,20 |
|
28 |
28 |
3,28 |
3,14 |
3,85 |
4,14 |
-0,29 |
-4,14 |
6,5 |
-0,5 |
12,94 |
12,81 |
-0,1923 |
12,85 |
|
I-III |
22 |
22 |
4,4 |
3,94 |
2,50 |
2,79 |
-0,29 |
-2,79 |
5,5 |
-1,5 |
16,68 |
11,00 |
0,0037 |
16,68 |
22 |
28 |
3,2 |
2,49 |
2,19 |
2,81 |
-0,62 |
-2,81 |
3,5 |
-0,5 |
11,38 |
7,00 |
0,0056 |
11,38 |
|
28 |
22 |
3,3 |
2,7 |
2,73 |
3,33 |
-0,61 |
-3,33 |
4,5 |
0,5 |
12 |
9,00 |
0,0090 |
12,00 |
|
28 |
28 |
3,28 |
3,6 |
3,05 |
2,78 |
0,27 |
-2,78 |
5 |
1 |
13,76 |
10,00 |
-0,0020 |
13,76 |
|
II-III |
22 |
22 |
3,35 |
3,5 |
2,39 |
2,29 |
0,10 |
-2,29 |
4 |
3 |
13,7 |
8,00 |
-0,0043 |
13,70 |
22 |
28 |
2,94 |
3,4 |
3,74 |
3,24 |
0,51 |
-3,24 |
5,5 |
-1,5 |
12,68 |
11,00 |
-0,0102 |
12,68 |
|
28 |
22 |
3,53 |
3,3 |
2,55 |
2,73 |
-0,18 |
-2,73 |
4,5 |
0,5 |
13,66 |
9,00 |
-0,0038 |
13,66 |
|
28 |
28 |
3,53 |
3,7 |
3,40 |
3,24 |
0,16 |
-3,24 |
6 |
-1 |
14,46 |
12,00 |
0,0070 |
14,46 |
|
III-III |
22 |
22 |
3,4 |
3,21 |
2,06 |
2,18 |
-0,12 |
-2,18 |
3,5 |
-0,5 |
13,22 |
7,00 |
0,0031 |
13,22 |
22 |
28 |
3,5 |
4,16 |
3,14 |
2,64 |
0,50 |
-2,64 |
5,5 |
-1,5 |
15,32 |
11,00 |
0,0038 |
15,32 |
|
28 |
22 |
3,51 |
2,8 |
2,00 |
2,50 |
-0,50 |
-2,50 |
3,5 |
-1,5 |
12,61 |
7,01 |
0,0100 |
12,62 |
|
28 |
28 |
3,05 |
3,5 |
3,61 |
3,14 |
0,46 |
-3,14 |
5,5 |
0,5 |
13,1 |
11,00 |
0,0103 |
13,10 |
|
Результаты работы