

6.3. Безопасные скорости автомобиля
Безопасной скоростью автомобиля называется такая скорость, с которой водитель в момент возникновения опасной дорожной обстановки имеет техническую возможность тем или иным способом предотвратить наезд.
При прямолинейном движении водитель может обеспечить
безопасность одним из следующих способов:
• остановить автомобиль до линии следования пешехода;
• пересечь линию следования пешехода, проехав перед ним раньше, чем он достигнет полосы движения автомобиля;
• пропустить пешехода перед автомобилем. При этом пешеход переходит полосу движения автомобиля раньше, чем последний достигнет линии следования пешехода.
Существуют пять безопасных скоростей движения автомобиля, при которых наезд на пешехода можно избежать.
Первой безопасной скоростью называется скорость автомобиля, следуя с которой водитель может, применяв экстренное торможение, остановиться у линии следования пешехода. Это условие выполняется при
![]() ,
(6.20)
,
(6.20)
где Syд - удаление автомобиля от пешехода в момент возникновения опасной обстановки (рис. 6.4); So - остановочный путь автомобиля.

Основная трудность в этом случае заключается в установлении Sуд.
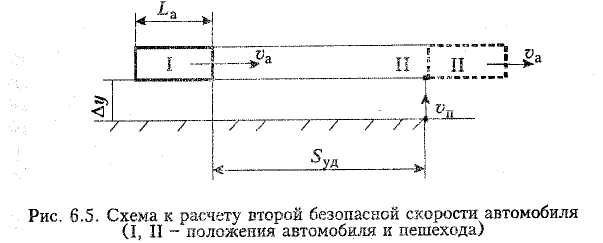
Второй безопасной скоростью называется минимальная скорость автомобиля, следуя с которой он полностью проедет линию следования пешехода в момент, когда тот подойдет к его полосе движения.
Это условие выполняется при
![]()
![]() ,
(6.21)
,
(6.21)
![]() y
- путь пройденный пешеходом до
полосы движения
y
- путь пройденный пешеходом до
полосы движения
автомобиля;
va , vп- скорости движения соответственно автомобиля и пешехода.
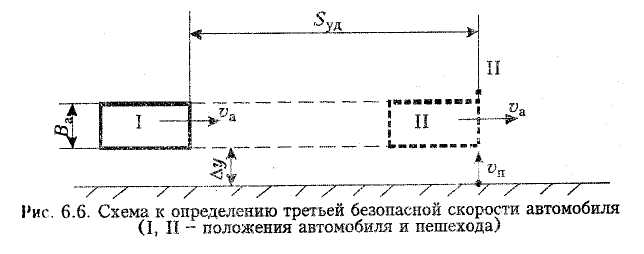
Третьей безопасной скоростью называется максимальная скорость автомобиля, двигаясь с которой он достигает линии следования пешехода к тому моменту, когда пешеход уже уйдет с его полосы движения.
Для этого необходимо соблюдение равенства
![]() ,
(6.22)
,
(6.22)
где Ва - ширина автомобиля (рис, 6.6).
Четвертой безопасной скоростью называется максимальная скорость
автомобиля, при которой водитель, применив экстренное торможение, успевает пропустить пешехода.
Для этого необходимо соблюдение равенства
![]() ,
(6.22)
,
(6.22)
где T1=t1+t2+0,5t3;
t1 ,t2, t3 —см выше;
v1 - скорость, с которой заторможенный автомобиль достигает линию следования пешехода (рис. 6.7);
j — установившееся замедление автомобиля.

Пятой безопасной скоростью называется такая скорость автомобиля, следуя с которой водитель, даже применив экстренное торможение в момент возникновения опасности, успевает проехать мимо пешехода.
Эту скорость можно определить из выражения
![]() .
(6.24)
.
(6.24)
Контрольные вопросы
В чем особенности процесса торможения автомобиля?
Как определяются параметры движения автомобиля?
Сколько существует безопасных скоростей автомобиля, при которых наезд на пешехода можно избежать? В чем их отличия?