

11.3. Виды столкновений автомобилей
Для восстановления механизма ДТП необходимо:
• определить место столкновения;
• взаимное положение ТС в момент удара;
• расположение ТС на дороге после ДТП;
• скорости ТС перед ударом.
Виды столкновений показаны на рис. 11.4.

Положение автомобилей в момент удара часто определяют путем следственного эксперимента но деформациям, возникающим в результате столкновения. Для этого поврежденные автомобили располагают как можно ближе друг к другу, стараясь совместить участки, контактировавшие при ударе. Если это не удается сделать, то автомобили располагают так, чтобы границы деформированных участков были расположены на одинаковых расстояниях друг от друга. Поскольку такой эксперимент провести довольно сложно, иногда вычерчивают в масштабе схемы автомобилей и, нанеся на них поврежденные зоны, определяют угол столкновения графически.
Определить начальную скорость автомобиля обычно довольно трудно, а иногда и невозможно.
Отсутствие надежной информации о коэффициенте восстановления Кyд часто вынуждает экспертов рассматривать предельный случай, считая удар абсолютно неупругим (Куд=0).
11.4. Определение параметров прямого столкновения
Определить параметры прямого столкновения (встречного и попутного) можно лишь в том случае, если один из автомобилей до удара был неподвижным (v'2 = 0) и после удара оба автомобиля перемещаются как единое целое со скоростью v'1.
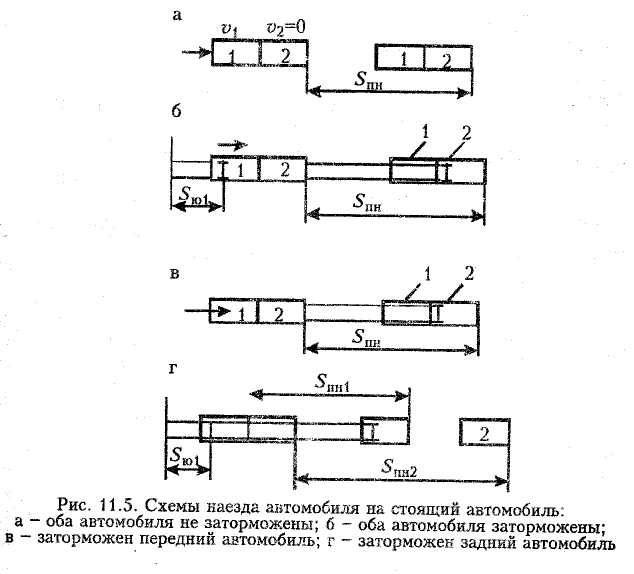
При этом возможны такие варианты (рис. 11.5):
а) автомобили не заторможены, и после удара они катятся свободно с начальной скоростью v1/. Уравнение кинетической энергии при этом
![]() (11.10)
(11.10)
где SПН - перемещение автомобиля после удара;
![]() дв
-
коэффициент суммарного сопротивления
движению,
дв
-
коэффициент суммарного сопротивления
движению,
![]()
здесь д - коэффициент сопротивления дороги,
Рв - сила сопротивления воздуха;
Рхх - сила сопротивления трансмиссии;
![]() вр
-
коэффициент
учета вращающихся масс;
вр
-
коэффициент
учета вращающихся масс;
G - вес автомобиля;
f - коэффициент трения;
aД - угол наклона дороги.
Откуда
![]() (11.11)
(11.11)
Скорость автомобиля 1 перед ударом при v2=0 и v1/ = v2/:
![]() (11.12)
(11.12)
б) оба автомобиля заторможены, после удара перемещаются совместно на расстояние Sпн с начальной скоростью v1/.
Скорость автомобиля после удара
![]() (11.13)
(11.13)
где х - коэффициент продольного сцепления.
Скорость автомобиля 1 в момент удара
![]()
Скорость автомобиля 1 в начале тормозного пути
![]() (11.4)
(11.4)
где Sю1 - длина следа юза автомобиля 1 перед ударом.
Скорость автомобиля 1 перед началом торможения
![]() (11.5)
(11.5)
в) заторможен стоящий автомобиль 2, автомобиль 1 не заторможен.
![]()
Уравнение кинетической энергии в этом случае
откуда
![]() (11.16)
(11.16)
Скорости v1 vа1, vа определяются как в предыдущих случаях;
г) стоящий автомобиль не заторможен, задний автомобиль 1 перед ударом в заторможенном состоянии перемещается юзом на расстояние Sю1. После удара перемещение автомобиля 1 равно SПН1, автомобиля 2 - SПН.
По аналогии с предыдущим из уравнения кинетической энергии
![]()
Получаем
![]() (17.17)
(17.17)
Скорости v1, va1, va определяются так же, как и выше.
Применить эту методику для анализа встречного или попутного столкновения, при котором двигались оба автомобиля, возможно только в том случае, если следствием или судом установлена скорость одного из автомобилей.