

Линейные операции над векторами
Под линейными операциями над векторами понимают операции сложения и вычитания векторов, а также умножение вектора на число.
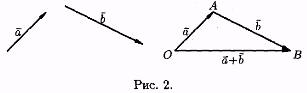
Пусть а и b — два произвольных вектора. Возьмем произвольную точку О и построим вектор ОА=а. От точки А отложим вектор АВ = b . Вектор ОВ, соединяющий начало первого вектора с концом второго, называется суммой векторов а и b : О B=а+b (см. рис. 2)
 .
.
Это правило сложения векторов называют правилом треугольника. Сумму двух векторов можно построить также по правилу параллелoграмма (см. рис. 3).

На рисунке 4 показано сложение трех векторов а, b и с.
![]()
Под разностью векторов а и b понимается вектор с=а-b такой, что b+с=а (см. рис. 5).
![]()
Отметим, что в параллелограмме, построенном на векторах а и b одна направленная диагональ является суммой векторов а и b , а другая — разностью (см. рис. 6).
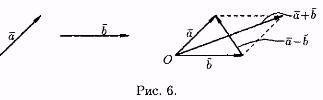
Можно вычитать векторы по правилу: а - b = а + (-b ), т. е. вычитание векторов заменить сложением вектора а с вектором, противоположным вектору b .
Произведением вектора а на скаляр (число) λ называется вектор λ*а (или а*λ), который имеет длину |λ|*|а|, коллинеарен вектору а, имеет направление вектора а, если λ>0 и противоположное направление, если λ<0. Из определения произведения вектора на число следуют свойства этого произведения:
1) если b=λ * а , то b || а . Наоборот, если b ||а , (а0 ), то при некотором λ верно равенство b = λа ;
2) всегда а =|а | • а -о , т. е. каждый вектор равен произведению его мо дуля на орт.
Линейные операции над векторами обладают следующими свойствами:
1. а+b=b+а 2. (а +b)+с=а +(b +с), 3. λ1 • (λ2 •а) =λ1 •λ2 •а, 4. (λ1 +λ2) •а =λ1 •а +λ2 •а, 5. λ • (а +b) =λ •а+λ •b.
Эти свойства позволяют проводить преобразования в линейных операциях с вектором так, как это делается в обычной алгебре: слагаемые менять местами, вводить скобки, группировать, выносить за скобки как скалярные, так и векторные общие множители.
Проекция вектора на ось
Пусть в пространстве задана ось l, т. е. направленная прямая.
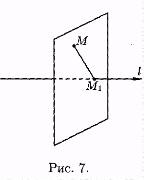
Проекцией точки М на ось l называется основание М1 перпендикуляра ММ1, опущенного из точки на ось.
Точка М1 есть точка пересечения оси l с плоскостью, проходящей через точку М перпендикулярно оси (см. рис. 7).
Если точка М лежит на оси l, то проекция точки М на ось совпадает с М1.
Пусть АВ — произвольный вектор (АВ 0). Обозначим через А1 и b 1проекции на ось l соответственно начала А и конца В вектора АВ и рассмотрим вектор А1В1
Проекцией вектора АВ на ось l называет ся положительное число |A 1B 1 | , если вектор А 1В 1 и ось l одинаково направлены и отрица тельное число — |A 1B 1 | , если вектор А 1В1 и ось l противоположно направлены (см. рис. 8). Если точки a 1и b 1совпадают (А 1В 1 =0), то проекция вектора АВ равна 0.
Проекция вектора АВ на ось l обозначается так: прlАВ. Если АВ=0 или АВl , то прl АВ=0.

Угол между вектором а и осью l (или угол между двумя векторами) изображен на рисунке 9.
5. Скалярное произведение векторов
Определение. Скалярным
произведением векторов ![]() и
и ![]() называется
число, равное произведению длин этих
сторон на косинус угла между ними.
называется
число, равное произведению длин этих
сторон на косинус угла между ними.![]()
Свойства скалярного
произведения: ![]()
![]()
![]()
![]()
![]()
![]()
![]()
Скалярное
произведение в координатах
Если ![]()
![]() то
то ![]()
![]()
Векторное
произведение векторов.Определение. Векторным
произведением векторов
и
называется
вектор ![]() ,
удовлетворяющий следующим условиям:
,
удовлетворяющий следующим условиям:
1) ![]() ,
где ⱷ -
угол между векторами
и
,
,
где ⱷ -
угол между векторами
и
,![]()
2) вектор ортогонален векторам и
3) , и образуют правую тройку векторов.
Обозначается: ![]() или
или![]() .
.
Свойства векторного произведения векторов:
1) ![]() ;
;
2) или = 0 или = 0;
3) (m ) = (m ) = m( );
4) ( + ) = + ;
5)
Если заданы векторы
(xa, ya, za) и
(xb, yb, zb) в
декартовой прямоугольной системе
координат с единичными векторами ![]() ,
то
,
то
*
=![]() 6)
Геометрическим смыслом векторного
произведения векторов является площадь
параллелограмма, построенного на
векторах
и
.
6)
Геометрическим смыслом векторного
произведения векторов является площадь
параллелограмма, построенного на
векторах
и
.
6. Дивергенция —это линейный дифференциальный оператор на векторном поле, характеризующий поток данного поля через поверхность малой окрестности каждой внутренней точки области определения поля.
Оператор дивергенции, применённый к полю , обозначают как
![]() или
или![]() .
.
Определение дивергенции:
![]()
где ФF — поток векторного поля F через сферическую поверхность площадью S, ограничивающую объём V. Ещё более общим, а потому удобным в применении, является определение, когда форма области с поверхностью S и объёмом V допускается любой. Единственным требованием является её нахождение внутри сферы радиусом, стремящимся кнулю (то есть чтобы вся поверхность находилась в бесконечно малой окрестности данной точки, что нужно, чтобы дивергенция была локальной о перацией и для чего очевидно недостаточно стремления к нулю площади поверхности и объёма ее внутренности). В обоих случаях подразумевается, что
![]() .
.
Физический смысл дивергенции.
Выясним с помощью формулы div F(M)=lim((V)→0) 1/(V) ∫s∫(V, n)ds физический смысл дивергенции. Для этого будем рассматривать векторное поле F(M) как поле скоростей жидкости с плотностью р==1. Как установлено поток П=∫s∫(V, n)ds
вектора F(M) равен количеству жидкости, протекающей за единицу времени через поверхность S в направлении нормали n. Пусть n — внешняя нормаль. Поскольку S — замкнутая поверхность, то очевидно поток вектора F(M) равен количеству жидкости, которое за единицу времени возникает или уничтожается в пределах области V, ограниченной поверхностью S. Назовем это количество суммарной мощностью источников (если П>0) или стоков (если П<0), расположенных в области V. Рассмотрим отношение1/(V) ∫s∫(V, n)ds. Оно представляет собой среднюю плотность источников (или стоков) , т. е. количество жидкости, возникающей (или исчезающей) за единицу времени в единице объема области V, а предел lim((V)→0) 1/(V) ∫s∫(V, n)ds при условии, что область V стягивается в точку М, можно назвать плотностью источников (или стоков) в точке М. Но этот предел равен div F(M). Таким образом, дивергенция векторного поля скоростей характеризует плотность источников жидкости.
Если div F(M )>0, то, как следует из формулы ∫v∫∫ div F(M)dv=∫s∫( F(M)n)ds , П>0, т. е. внутри области V имеются источники жидкости и из нее вытекает жидкости больше, чем втекает; если div F(M )>0, то П<0, т. е. внутри области V имеются стоки жидкости и в нее втекает жидкости больше, чем вытекает. Если же div F(M )=0, то П=0, т. е. внутри области V нет ни стоков, ни источников и в нее втекает столько же жидкости, сколько и вытекает. Это, например, имеет место для любой области V, расположенной в потоке воды, текущей в реке. Для произвольного векторного поля div F(M) =0 имеет аналогичный физический смысл: дивергенция характеризует плотность источников поля.
Векторное поле F(M) наз соленоидальным или трубчатым , если в каждой его точке дивер. div F(M )=0. Вычислим дивергенцию div(M ): V(M)= {-ωy, ωx, 0}; div V(M)= ∂V\∂x+∂V\∂y+∂V\∂z=∂( -ωy)\∂x+∂(ωx)\∂y+∂0\∂z=0- векторное поле соленоидальное.