

6. Влияние технического состояния автомобиля на тормозную динамичность
Число аварий, причиной которых была неисправность тормозной системы автомобиля, достаточно велико. По данным Всесоюзного научно-исследовательского института безопасности дорожного движения, неудовлетворительное состояние тормозной системы является в среднем причиной более половины всех ДТП, возникших из-за
ST.M
|
|
1 X / |
|
1 |
|
|
j |
|
|
|
|
/ |
/ |
|
|
; |
! |
/ |
|
|
Л |
|
|
|
|
|
|
|
|
18
10
а)
П
г л3,мм
ST,M
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
30
25
20 18
15
Передних 15 25 35 мм Задних 20 30 40 мм 6) Ход шток од
Рис. 12. Влияние зазора Дэ между тормозными накладками и барабанами на тормозные пути ST грузовых автомобилей: I — автомобиль грузоподъемностью 7 т; 2 — автомобиль грузоподъемностью 4 т
технических неисправностей. Около 15% аварий со смертельными исходами в США произошли вследствие плохого состояния тормозной системы автомобилей.
Ухудшение тормозной динамичности может быть вызвано увеличением зазора между фрикционными накладками и тормозными барабанами, наличием масла и воды на их поверхностях, нарушением регулировок, попаданием воздуха в гидравлический привод, недостаточным давлением в системе.
На рис. 12, а показаны результаты испытаний двух грузовых автомобилей грузоподъемностью 4 и 7 т при начальной скорости 8,3 м/с. При увеличении среднего зазора Д8 между тормозными накладками и барабаном на 0,5 мм тормозной путь увеличивается примерно на 20—25%.
На автомобилях с тормозной системой, имеющей гидропривод, увеличение зазора Д3 приводит к увеличению хода тормозной педали и времени запаздывания системы. При торможении автобуса ПАЗ-651 со скорости 8,3 м/с при зазоре Д3 = 0,25 мм время tc составило 0,16—0,25 с, а при Д3 = 0,5 мм оно возросло, до 0,4—0,45 с. Тормозной путь при этом увеличился на 25%.
У" автомобилей с пневмоприводом тормозных механизмов неисправный компрессор или регулятор давления может быть причиной недостаточного давления воздуха в приводе, увеличения времени /с и пути 5Т. Так, у грузового автомобиля при начальной скорости 8,3 м/с из-за уменьшения давления в тормозных камерах g 0,5 до 0,3 МПа тормозной путь может увеличиться почти вдвое. К аналогичным результатам приводит увеличение хода штоков тормозных камер по сравнению с номинальным (рис. 12, б).
Рис.
13. Влияние технического состояния
тормозной системы на замедление
колеса
/8
и давление в тормозных камерах ртм-
а
— теоретическая диаграмма; б —исправная
тормозная система: в —большие зазоры
в тормозных механизмах; е — неполное
прилегание накладок к тормозным
барабанам; д
— замасленные накладки; е — малый ход
у клапанов тормозного крана;
ж — большой
ход
у клапанов тормозного крана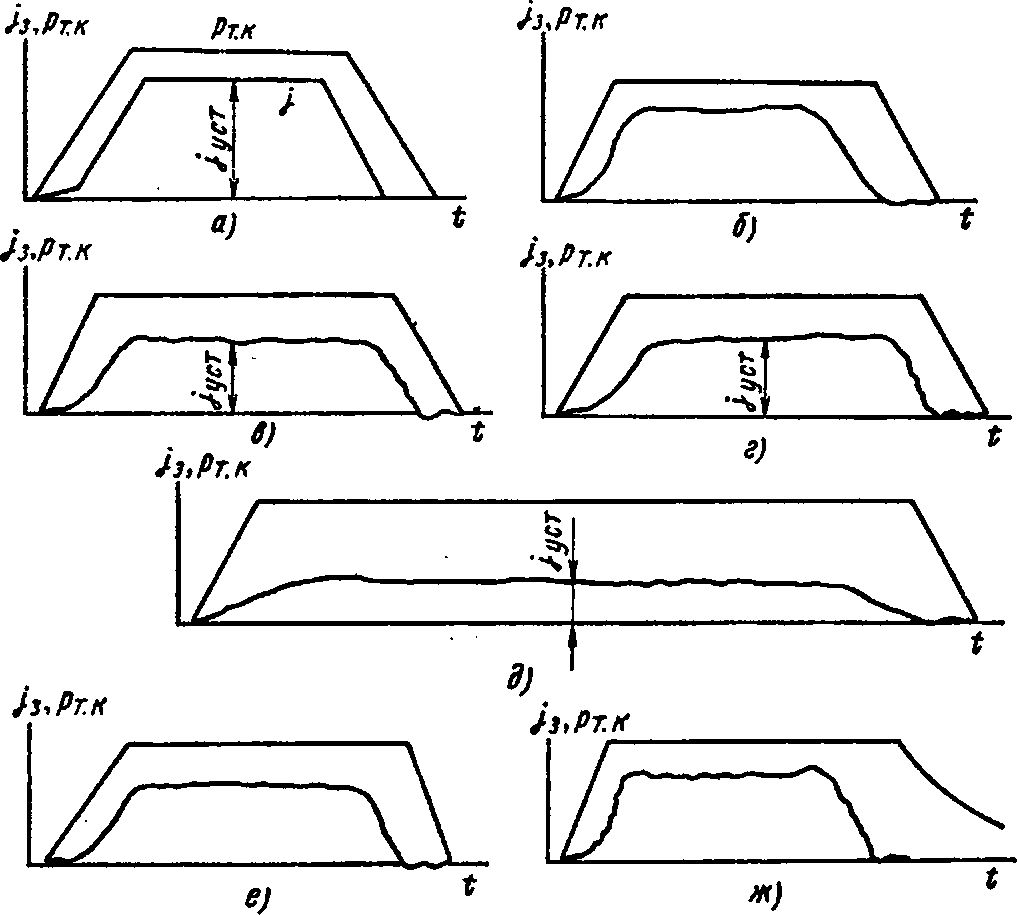
Замасливание фрикционных накладок может уменьшить замедление и увеличить тормозной путь в 4—5 раз. При нарушении установленного свободного хода тормозной педали и клапанов тормозного крана время tc возрастает на 15—25%, а замедление уменьшается на 5—7%. Кроме того, при этом затрудняется управление автомобилем, так как водителю труднее ощущать начало рабочего хода тормозной педали.
На рис. 13 показаны тормозные диаграммы легкового автомобиля с различным состоянием тормозной системы. Вследствие неисправности системы установившееся замедление может уменьшиться, а время и путь торможения возрасти в несколько раз.
Некоторые дефекты не влияют неиисредсгьенни па ии^адаюип тормозной динамичности, но сказываются на работоспособности узлов и деталей, уменьшая надежность тормозной системы. Так, например, из hog цилиндро-поршневой группы компрессора способствует попаданию масла в привод, а неправильная регулировка регулятора давления — работе системы с повышенным давлением. Обе неисправности приводят к ускоренному изнашиванию резиновых элементов (шлангов, диафрагм тормозных камер), вызывая их внезапные отказы, ведущие к ДТП. Передние тормозные шланги легковых автомобилей работают в более тяжелых условиях, чем задние, и поэтому менее долговечны. Они постоянно деформируются в вертикальном направлении при колебаниях подвески и в горизонтальном при поворотах управляемых колес. Короткие шланги разрушаются в местах их заделки со штуцерами из-за чрезмерного перегиба. Слишком длинные шланги попадают между витками пружин передней подвески автомобиля и быстро истираются.
Ухудшение тормозной динамичности автомобиля вызывают также дефекты передней подвески, перекосы мостов, неисправности амортизаторов, неодинаковое давление в шинах, различная степень изнашивания их протекторов. Учитывая неизбежное ухудшение технического состояния автомобиля при эксплуатации, нормативы тормозной динамичности, приведенные в табл. 9, мягче требований, предъявляемых к новым автомобилям (см. табл. 6).
Автомобили
9. Нормативы тормозной эффективности рабочей тормозной системы
(ГОСТ 25478—82)
я • |
1ормозной |
^уст» |
V + tB, С |
|
путь, м |
М/с» |
|
- я |
|
|
|
Я <В
2 * X т А О
ч!"
Пассажирские с числом мест не более 8
Дв
5
Св.
5 До 3,5 3,5—12 Св. 12 До 3,5 3,5—12 Св. 12
Грузовые
Автопоезда 16,2/14,5
21,2/17,7
5,2/6,1
0,6
0,53
0,46
0,41
0,41 0.41 0,41 0,41 0,41 0,41
4,5/5,5
4,5/5,0
4,0/5,4 4,0/5,7 4,0/6,1 4,0/4,7 4,0/4,9 4,0/5,0
7. ПУТИ ПОВЫШЕНИЯ ТОРМОЗНОЙ ДИНАМИЧНОСТИ
АВТОМОБИЛЯ
Для повышения тормозной динамичности и активной безопасности автомобиля применяют регуляторы, обеспечивающие более полное использование сцепления с дорогой каждым колесом, и противо- блокировочные системы, предотвращающие юз. Для уменьшения времени tc на автомобилях устанавливают быстродействующие тормозные приводы, а для увеличения тормозного момента — усилители и специальные тормозные механизмы. Подбирая состав резины и рисунок протектора шин, добиваются хороших сцепных свойств как в продольном, так и в поперечном направлении. Наиболее перспективно применение противоблокировочных систем, автоматически устраняющих блокировку затормаживаемых колес.
На легковых автомобилях впервые прогивоблокировочные системы были применены в 1954 г., а на грузовых автомобилях и прицепах — в 1959 г. С 1970 г. многие автомобильные фирмы за рубежом устанавливают противо- блокировочные системы на серийный автомобиль за дополнительную плату,
Конструкции противоблокировочных систем разнообразны, однако, в любой из них используется зависимость коэффициента сцепления срж от степени проскальзывания Я колеса, определяемой по формуле
Я = (ок — ш «г)/» к,
где иь. и юк — соответственно линейная скорость центра и угловая скорость колеса.
При vK — ojK/- имеет место чистое качение колеса и Я = 0. При
> <°кг колесо катится с проскальзыванием (ведомый и тормозной режимы ) и 0 < Я < 1. Если со„ = 0, то Я = 1, колесо при этом движется не вращаясь, возникает юз. При vK <С (окг колесо катится с пробуксовыванием (активный режим) и Я с 0. При уменьшении скорости уи до нуля колесо вращается, но автомобиль остается на месте и Я стремится к — оо.
Экспериментальная зависимость <р = ср (Я) показана на рис. 14, а. При отсутствии тормозного момента колесо нагружено только силами сопротивления движению (ведомый режим), касательная реакция дороги невелика. Соответственно малы касательная деформация шины, ф^ и Я (участок OA). При увеличении тормозного момента возрастает касательная реакция дороги, вызывающая увеличение деформации шины и упругого проскальзывания ее элементов. Коэффициент сцепления изменяется примерно пропорционально Я (участок А В), а взаимодействие шины с дорогой определяется в основном трением покоя. Дальнейший рост /Итор вызывает прогрессивное увеличение числа скользящих элементов в зоне контакта до тех пор, пока коэффициент фх не достигнет максимума (точка В). Максимальный коэффициент сцепления фхтах и граничная степень проскальзывания Я,р соответствуют наиболее эффективному режиму торможения. При дальнейшем увеличении тормозного момента по дороге скользит почти вся зона контакта, и, поскольку трение скольжения меньше трения покоя, касательная реакция дороги уменьшается. Уменьшение реакции дороги вызывает снижение эффективности торможения, приводя к остановке — блокировке — колеса (точка С). При отсутствии противоблокировоч- ной системы колесо блокируется весьма быстро, менее чем за 1 с. Коэффициент сцепления фю при блокировке колеса при движении автомобиля по сухому покрытию на 10—15%, а по мокрому — на 20—30% меньше ср^шах-
Рис.
14. Параметры работы противоблокировочной
системы:
а
— зависимость коэффициентов сцепления
<р* и фр от степени проскальзывания
к: б ~ моменты, действующие на
затормаживаемое колесо; в — изменение
моментов Мшр, AJ«
а
Мх
от степени проскальзывания
%,
Пассивные
режимы: )
Ведомый _
-Л
Хх
1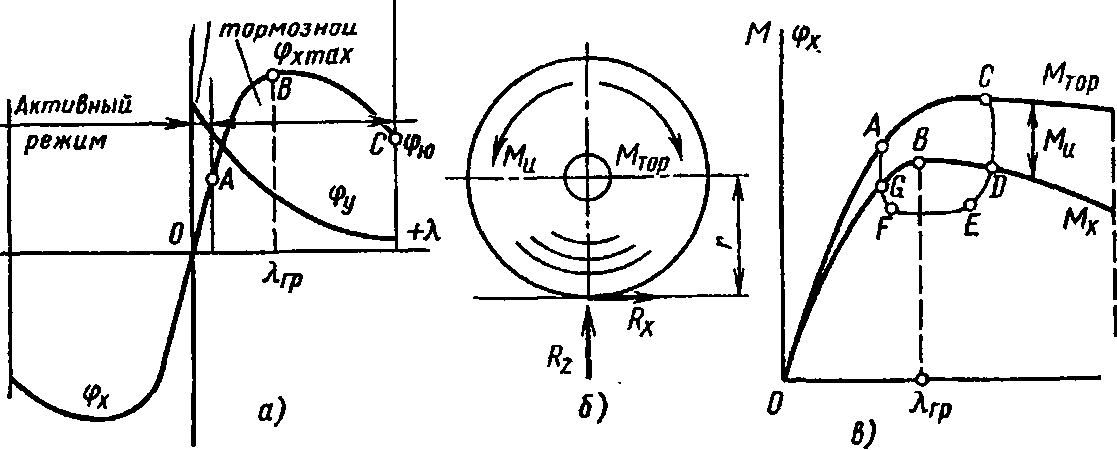
Основным назначением противоблокировочных систем является создание такого режима торможения, при котором степень проскальзывания колеса была бы близка Ягр, а коэффициент сцепления — максимальному значению Фжо,ах.
С позиций теории автоматического регулирования любую противобло- кировочную систему можно представить в виде четырех звеньев: объекта регулирования, датчиков, управляющего блока и модулятора давления в тормозном приводе. Объектом регулирования является автомобиль с тормоз- ным приводом, тормозными механизмами, колесами и шинами. Датчики, в зависимости от принятого в данной системе закона регулирования, измеряют угловую скорость и угловое замедление колеса, замедление автомобиля, давление в тормозном приводе или другие параметры. Управляющий блок оценивает показания датчиков, формирует сигналы, управляющие тормозными моментами, и подает их на вход модулятора давления, который изменяет тормозные моменты на колесах в соответствии с этими сигналами. Тормозные моменты, поступая на вход звена «Автомобиль», изменяют его движение, замыкая систему.
Рассмотрим работу противоблокировочного устройства. При воздействии тормозного момента Мтор на колесо его угловая скорость уменьшается, возникает инерционный момент
М и JKeKf
где JК и е„ — момент инерции и угловое замедление колеса.
Пренебрегая сопротивлениями качению и воздуха, найдем момент Мх касательной реакции Rx дороги (рис. 14, б).
Мх = Rxr = Rz rcpx = AfTop — JKeK.
Если приближенно считать Rz и г постоянными, то момент Мх будет прямо пропорционален (рх. Это дает возможность показать графически связь между моментами Мтор, Мх и Ми (рис. 14, в). При увеличении момента Мтор от нуля возрастают проскальзывание колеса и момент Мх. При этом Мх всегда меньше Мтор на величину Укен. Момент Мх увеличивается до максимума (точка В),
соответствующего граничному значению степени проскальзывания Ягр. После этого <рх и Мх начинают быстро уменьшаться, а угловое замедление колеса возрастает. Во избежание блокировки колеса противоблокировочная система уменьшает тормозной момент, делая это с некоторым запаздыванием (точка С). Момент Мтор снижается до некоторого предела (точка £), после чего поддерживается на постоянном, заранее установленном уровне (отрезок EF). Уменьшение Мтор вызывает понижение углового замедления, которое в точке D падает до нуля (колесо вращается равномерно), затем становится отрицательным, что означает разгон колеса. В точке F тормозной момент начинает увеличиваться, а угловое ускорение колеса уменьшается, и в точке G колесо снова вращается равномерно. Затем тормозной момент возрастает до точки А, после чего цикл работы проти- воблокировочной системы повторяется. Таким образом, тормозной момент при работе этой системы изменяется по контуру ACDEFGA, в результате чего реализуются значения А,, близкие Хгр, и значения фх, близкие Ф*твх- Естественно, каждый цикл начинается при меньшей скорости затормаживаемого колеса. В современных про- тивоблокировочных системах колебания к относительно ЯГр равны 0,05—0,1, а коэффициент сцепления выдерживается максимальным с точностью до 1%.
Изменение параметров движения затормаживаемого колеса показано на рис. 15. Если коэффициент сцепления постоянен, то замедление колеса также постоянно и скорость vK изменяется по линейному закону. При отсутствии противоблокировочной системы угловая скорость (йк также изменяется по прямой. При работе системы колесо то замедляет вращение, то разгоняется. Это вызывает периодические колебания юк относительно оптимальных значений (штриховая кривая). Частота колебаний в современных системах составляет 2—10 Гц.
Рис.
15. Изменение параметров движения
ик
и (йк/"
затормаживаемого колеса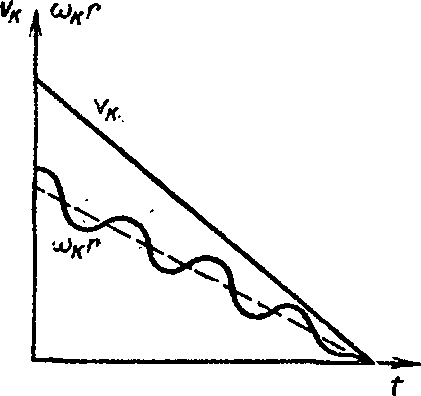
но определять величину ек. Чаще в качестве регулирующего параметра используют степень проскальзывания Я, хотя при торможении всех колес трудно определить скорость автомобиля. Обычно ее считают равной среднему арифметическому скорости всех колес автомобиля.
В противоблокировочной системе применяются механические и электронные датчики. На рис. 16, а показан механический датчик с модулятором давления в виде золотника. Датчик имеет вал /, связанный с колесом автомобиля, винтовую муфту 2 и маховик 5, укрепленный на муфте с небольшим трением, создаваемым башма
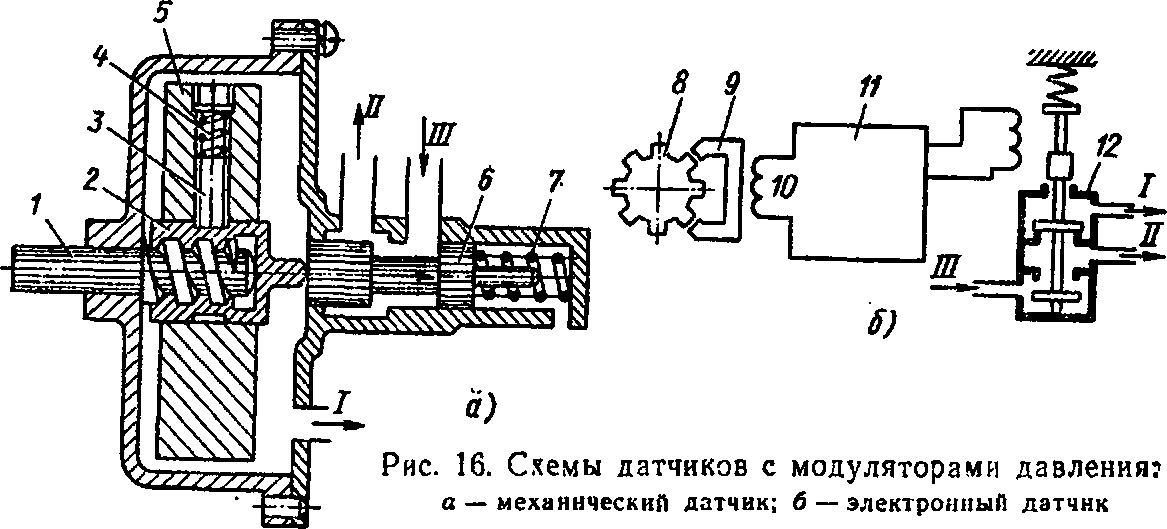
ками 3 и пружинами 4. Когда угловая скорость колеса падает и его угловое замедление достигает заданного порогового значения, маховик, перемещаясь вместе с муфтой 2 по винтовой нарезке вправо, преодолевает силу пружины 7 и сдвигает золотник 6. Золотник открывает канал //, соединенный тормозной камерой с отверстием /, ведущим в атмосферу. Тормозной момент сначала уменьшается, а затем возрастает, маховик же стремится вращаться с прежней скоростью. В результате трения башмака о муфту золотник 6 удерживается в прежнем положении. После того как угловые скорости вала 1 и маховика выровнятся, пружина 7 перемещает золотник и муфту влево, соединяя канал ///от тормозного крана с тормозной камерой, вследствие чего увеличивается тормозной момент.
Электронный датчик показан на рис. 16, б. Он имеет импульсный генератор, состоящий из зубчатого ротора 8, связанного с колесом автомобиля, и неподвижного магнита 9 с обмоткой возбуждения 10. При вращении ротора в обмотке индуктируется ток, частота и амплитуда которого пропорциональны (ок. Сигналы от генератора поступают к управляющему блоку //, выполненному в виде аналогового или цифрового счетно-решающего устройства. Блок управляет электромагнитным клапаном 12. Иногда применяют несколько клапанов, осуществляющих ступенчатое изменение давления.
Электронные противоблокировочные системы имеют весьма разнообразные алгоритмы функционирования; но все их можно разде
лить на неадаптивные и адаптивные. Неадаптивные поддерживают заранее заданную величину X, а адаптивные (самонастраивающиеся) сами определяют ее оптимальную величину.
Первые попытки применения противоблокировочной системы на автомобилях оказались неудачными. Большая инерционность механических датчиков не обеспечивала работу системы в диапазоне степени проскальзывания, близкой к Ягр, и тормозной путь автомобиля че только не уменьшался, но даже увеличивался. Однако испытания выявили одно существенное преимущество противоблокировочной системы — повышение поперечной устойчивости затормаживаемого
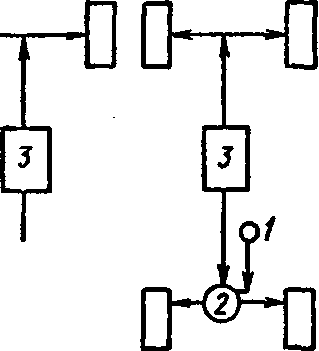 Рис.
17. Схемы установки противоблокировочной
системы: i
—
датчик: i
—модулятор;
3 — главный тормозной цилиндр
Рис.
17. Схемы установки противоблокировочной
системы: i
—
датчик: i
—модулятор;
3 — главный тормозной цилиндр
автомобиля. По мере увеличения степени проскальзывания коэффициент поперечного сцепления <ру уменьшается (см. рис. 14, а). При юзе колеса он близок к нулю, и достаточно небольшой поперечной силы, чтобы вызвать занос автомобиля. При установке на автомобиле противоблокировочной системы уменьшается степень проскальзывания, что приводит к повышению средней величины ц> у. В зоне, близкой к krp, коэффициент поперечного сцепления для сухого асфальтобетонного покрытия равен 0,35—0,45, в этом случае колесо может воспринимать большую поперечную силу без проскальзывания
На рис. 17 показаны наиболее распространенные варианты применения противоблокировочной системы.
Противоблокировочная система с датчиками и модуляторами на всех колесах (рис. 17, а) обеспечивает максимальную эффективность торможения и устойчивость. Однако при торможении автомобиля на поворотах, когда коэффициент сцепления с одной стороны автомобиля меньше, чем с другой (например, сухой асфальтобетон и накатанный снег), возможно появление поворачивающего момента, вызванного разностью тормозных сил слева и справа. Хотя к заносу автомобиля это не приводит благодаря наличию противоблокировочной системы, но вызывает его увод. Этот вариант системы самый дорогой и сложный.
В более простых вариантах противоблокировочной системы дат
чики устанавливают на всех колесах, но один из мостов — задний (рис. 17, б) или передний (рис. 17, б), оборудуют одним модулятором, общим для обоих колес. Другой мост автомобиля имеет, как и в первой схеме, два модулятора. При установке общего модулятора тормозные механизмы этого моста развивают одинаковые моменты на дороге с разными коэффициентами фж правых и левых колес и поворачивающего момента не возникает.
Возможно также применение двух модуляторов — по одному на каждый мост (рис. 17, г). Схема получается простой, надежной и обеспечивает вместе с тем достаточную устойчивость и эффективность торможения автомобиля. В наиболее простых вариантах системы ограничиваются установкой модулятора лишь на задний мост. При этом могут использоваться два колесных датчика (рис. 17, д) или один общий датчик (рис. 17, е), устанавливаемый на валу ведущей конической шестерни. В этих двух вариантах возможна блокировка передних колес, что, однако, не ухудшает курсовой устойчивости автомобиля. Две последние схемы весьма просты и дешевы. Преимущество последнего варианта противоблокировочной системы заключается в том, что она легко может быть установлена на автомобилях действующего парка без существенной их переделки.
В настоящее время накоплен большой экспериментальный материал, подтверждающий существенное повышение активной безопасности автомобиля при применении противоблокировочной системы. В табл. 10 приведены результаты испытания легковых автомобилей с подобной системой, действующей на все колеса.
При движении автомобиля, оборудованного противоблокировочной системой, по дороге с сухим покрытием тормозной путь в среднем уменьшается на 10—15%, а по дороге с мокрым покрытием — на 25—35%. Одновременно повышается курсовая устойчивость авто-
10. Показатели тормозной динамичности автомобилей
Начальная
Тормозной
путь, м
Повышение
эффективности. %
Дорога
скорость
торможения, м/с
с
ПБС
без
ПБС
Асфальтобетонная:
сухая
10,6
13,1
19,1
Мокрая
13,9
18,7
24,7
21,1
Брусчатка:
11,6
13,2
сухая
12,1
мокрая
19,1
23,4
18,8
Укатанный
снег
30,9
36,8
16,1
Асфальтобетон:
41.1
17,8
сухой
50,0
мокрый
•
27,7
62,5
100,0
37,5
Брусчатка:
45,5
'
сухая
59,0
22,9
мокрая
61,5
90,0
31,7
Примечание
ПБС — противоблоквровочная система.
мобиля. Поперечное отклонение заторможенного автомобиля от прежнего направления движения при наличии противоблокировоч- ной системы уменьшается почти вдвое.

rflO-H]
9
0
tlD-1
0
HCh
d
В)
г)
6)
Рис. 18. Способы повышения тормозной эффективности автомобиля:
а — д — схемы двухконтурных тормозных приводов; е — регулятор ВАЗ
мость. Стоимость системы управляющей всеми колесами легкового автомобиля, по американским данным, составляет примерно 400 долларов, по английским — 50—200 фунтов стерлингов.
Надежность работы тормозной системы значительно повышается при использовании раздельного — двухконтурного — привода. У автомобиля с обычным (одноконтурным) тормозным приводом утечка жидкости через неплотности в соединениях или вследствие разрыва резинового шланга вызывает отказ всех тормозных механизмов автомобиля. При раздельном приводе главный тормозной цилиндр имеет два поршня, каждый из которых создает давление в отдельном контуре. Чаще всего один контур приводит в действие тормозные механизмы переднего моста, а другой — тормозные механизмы заднего моста (рис. 18, а). Автомобиль, у которого каждый контур связан со всеми четырьмя колесами (рис. 18, б), наиболее безопасный, но и самый дорогой. В более дешевой так называемой шведской схеме (рис. 18, б) каждый контур обслуживает оба передних тормозных механизма и один задний. При этом обеспечивается хорошая эффективность каждого контура, но на скользкой дороге автомобиль может потерять устойчивость. Еще дешевле, но и опаснее диагональная схема (рис. 18, г). Иногда применяют.схему, в которой задние тормозные механизмы имеют по два рабочих цилиндра. Тогда один контур воздействует на цилиндры передних тормозных механизмов и на один из двух цилиндров каждого из задних тормозных механизмов (рис. 18, д), а второй приводит в действие другие цилиндры задних тормозных механизмов.
Для облегчения труда водителя и повышения эффективности тормозной системы применяют усилители тормозного привода: вакуумные или гидровакуумные.
Вакуумные усилители, устанавливаемые между тормозной педалью и главным тормозным цилиндром, имеют две полости, разделенные диафрагмой. При нажатии на тормозную педаль одна полость соединяется в атмосферой, а другая — с впускным трубопроводом двигателя. Вследствие различного давления по обе стороны от диафрагмы увеличивается усилие на штоке главного тормозного цилиндра, соединенном с диафрагмой.
Гидровакуумный усилитель устанавливают между главным тормозным цилиндром и тормозной магистралью. Поэтому при двух- контурном приводе требуется два усилителя. Чтобы этого избежать, применяют разделитель, автоматически отключающий неисправный контур от исправного. Такая система получается достаточно простой и надежной, хотя сохраняется опасность выхода из строя всях тормозных механизмов при нарушении герметичности трубопроводов между главным цилиндром и разделителем.
При работе с усилителем тормозного привода резко увеличиваются силы в тормозной системе и возрастает температура фрикционных поверхностей, что приводит к падению коэффициента трения, увеличению деформации тормозных барабанов и, как следствие, к уменьшению тормозного момента. Кроме того, усилитель, действующий на все колеса, может вызвать разгрузку задних колес, а при особенно резком торможении — их блокировку. Поэтому чаще применяют автоматические клапаны-регуляторы, снижающие давление в тормозном приводе задних колес при уменьшении вертикальной нагрузки.
В качестве примера рассмотрим регулятор автомобилей ВАЗ (рис. 18, е). При нажатии на тормозную педаль 13 жидкость из главного тормозного цилиндра 14 поступает непосредственно к цилиндрам 15 передних тормозных механизмов, а к цилиндрам 12 задних тормозных механизмов — через регулятор. Через штуцер 2, ввернутый в корпус 11 регулятора, жидкость подается в полость А, а затем через отверстия а в заплечике поршня 3 и зазор между втулкой 5 и головкой поршня через штуцер 6 к тормозным цилиндрам 12. Пружина 9, надетая на шток поршня, одним концом упирается в уплотнительное кольцо 10, а другим — в тарелку 8. Сверху корпус регулятора закрыт пробкой 4.
65
3 Зак. 1102
этого давление в полости А нарастает быстрее, чем в полости Б. Соответственно тормозные моменты на передних колесах будут нарастать интенсивнее, чем на задних.
Торсион 1 связан g задним мостом автомобиля. При разгрузке заднего моста в процессе торможения уменьшается сила нажатия торсиона на шток поршня и полости А и Б разобщаются при меньшем давлении жидкости. Поэтому сила, развиваемая задними тормозными цилиндрами, будет меньше силы передних цилиндров. В результате этого уменьшается вероятность блокировки задних колес и увеличивается устойчивость автомобиля при торможении. Аналогичный принцип действия у регулятора автомобилей КамАЗ, изменяющего давление воздуха в тормозных камерах задней тележки в зависимости от приходящейся на нее вертикальной нагрузки.