

§ 6. Тормозная динамичность автомобиля
1. Значение тормозной динамичности для безопасности дорожного движения
Управляя автомобилем, водитель постоянно изменяет его скорость, приводя ее в соответствие с окружающей обстановкой. Он должен быть всегда готовым к экстренной остановке автомобиля в Случае появления внезапного препятствия. Замедление автомобиля, вызываемое трением в трансмиссии и сопротивлениями дороги и воздуха, невелико, в опасной же ситуации необходимо остановить автомобиль на коротком расстоянии. Это возможно лишь при наличии на автомобиле специальной системы, создающей большое дополнительное сопротивление движению и быстро снижающей скорость. Сопротивление, создаваемое тормозными механизмами, дает возможность также удерживать на месте стоящий автомобиль, а при движении на спуске предохранять его от нежелательного разгона.
Современные автомобили снабжаются четырьмя тормозными системами: рабочей, запасной, стояночной и вспомогательной.
Рабочая тормозная система является основной. Она предназначена для регулирования скорости автомобиля в любых условиях движения. Запасная система используется в случае отказа рабочей системы, а стояночная удерживает неподвижный автомобиль на месте. Вспомогательная тормозная система нужна для поддержания скорости автомобиля постоянной в течение длительного времени. На легковых автомобилях и грузовых автомобилях малой и средней грузоподъемности в качестве запасной тормозной системы часто используют стояночную, а во вспомогательной системе — двигатель. На Ррузовых автомобилях большой грузоподъемности и автобусах большой вместимости применяют четыре раздельные тормозные системы.
Наибольшее значение для безопасности автомобиля имеет рабочая тормозная система. Ее применяют для плавного снижения скорости с замедлением (до 2,5—3 м/с2) — служебное торможение и для резкого ее уменьшения с максимально возможным в данных дорожных условиях замедлением (до 8—9 м/с2) — экстренное или аварийное торможение.
Из всех операций по управлению автомобилем экстренное торможение считается одной из наиболее трудных. Многие действия водитель повторяет по нескольку десятков и сотен раз за смену и, выработав определенные навыки, достигает в них необходимого автоматизма. Аварийное торможение требуется относительно редко, и натренированность водителя в его применении минимальна. При экстренном торможении на автомобиль и водителя действуют большие силы, а время, имеющееся в распоряжении водителя, исчисляется несколькими секундам и 4 В отличие от остальных операций по управлению, выполняемых водителем в спокойном состоянии и медленном темпе, экстренное торможение связано с внезапным возникновением препятствия. Ощущение опасности создает нервное напряжение, вызывая гнетущее чувство беспокойства, страха и резко усиливая психофизиологическую нагрузку водителя. Возникает состояние стресса, при котором водитель может либо вообще не выполнить необходимых действий, либо выполнить их в замедленном темпе, либо, наконец, совершить действия, прямо противоположные требуемым.
Для обеспечения безопасности автомобиля тормозная система должна удовлетворять следующим требованиям.
Время срабатывания системы должно быть минимальным, а замедление автомобиля — максимальным во всех условиях эксплуатации.
Все колеса автомобиля должны затормаживаться одновременно и с одинаковой интенсивностью.
Тормозные силы на колесах должны нарастать плавно, в системе не должно быть заеданий и заклиниваний.
Эффективность действия системы должна быть постоянной в течение всего срока службы автомобиля, а вероятность отказов минимальной.
Работа тормозной системы не должна вызывать потери устойчивости автомобиля.
Усилия, необходимые для приведения системы в действие л перемещения рабочих органов управления (педали, рычаги), не должны превышать физических возможностей водителя.
Полностью удовлетворить все эти требования весьма затруднительно, хотя работа над совершенствованием конструкций тормозных механизмов и тормозного привода ведется во многих странах мира.
2. ИЗМЕРИТЕЛИ И ПОКАЗАТЕЛИ ТОРМОЗНОЙ ДИНАМИЧНОСТИ
Рис.
9 Показатели тормозной динамичности
автомобиля:
а
— зависимость сил сцепления ог времени;
б — схема сил. действующих на автомобиль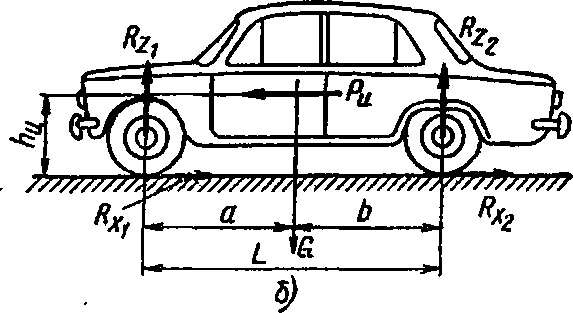
р |
Рвг_ |
|
в' |
\' С |
||
|
|
N > / \ / у ъ Jj. |
а/ |
в Rxlmax |
||
|
|
0 |
fF |
|
Rxlmax |
|
|
ip |
|
. tm _ |
|
|
t |
|
tc |
«т JU| |
u. |
ttscr |
|
|
|
|
|
trco |
|
|
|
|
|
|
|
|
о . |
|
Водитель, заметив препятствие, оценивает дорожную обстановку, принимает решение о торможении, переносит ногу с педали подачи топлива на тормозную педаль. Время /р, необходимое для этих действий (рис. 9, а), — время реакиии водителя — обычно находится в пределах 0,3—2,5 с. Оно зависит от квалификации водителя, его возраста, степени утомления и других факторов. При неожиданном возникновении опасности это время обычно больше. Время 1С (время запаздывания тормозной системы) необходимо для устранения зазоров в соединениях тормозного привода и перемещения всех его деталей Это время, зависящее от конструкции и технического состояния тормозного привода, колеблется в среднем от 0,2— 0,3 с (гидравлический привод) до 0,6—0,8 с (пневматический привод).- У автопоездов с пневматическим приводом тормозных механизмов оно может достигать 2—3 с. В течение времени (/р +
автомобиль продолжает двигаться равномерно с начальной скоростью t>0. В конце этого периода возникают тормозные силы, вызывающие замедление движения. Определим эти силы, приняв для простоты расчетов, что сопротивлением дороги и воздуха можно пренебречь, а коэффициент учета вращающихся масс равен единице.
При этих допущениях согласно условиям равновесия можно написать (рио. 9, б)
КОНСТРУКТИВНАЯ 2
безопасность автомобиля 2
Pen = Ga<px/(L — <р*/1д). 69
б) 74
°оор" V Лц+0.5еде 79
CW = °'5В*8 = Г (68) 83
X —fir X 0Лк + 1—rjr) 83
К — (L об — £ф)/Хф. 133
kon = faNn + k,NT + 63//с)/(Л/л + Nr + А/0 + /V„), 157
h = Д/е, 185
Р = MvH (2Sn), 184
где a, b и hn — расстояния соответственно от центра тяжести автомобиля до переднего и заднего мостов и до поверхности дороги; Rxi и Rxi — касательные реакции дороги, действующие на колеса переднего и заднего мостов автомобиля; ;3 — замедление автомобиля (отрицательное ускорение).
Предельное значение касательной реакции, обусловленное сцеплением шины с дорогой, называется силой сцепления Рсц. Силы сцепления для переднего Рсц) и заднего Рсц2 мостов автомобиля определяют по следующим формулам:
Рст = Я«тах = ЯйФ» (20)
Р с ц2 == ^*2max = ^ггФж- (21)
Из формул (17)—(21) получаем соотношение между касательными реакциями Rxl и Rx2l при котором полностью используется сцепление всех шин автомобиля с дорогой,
Я*
Rx 2 og—Ац/и а—Лцфх
Таким образом, конструкция тормозной системы должна создавать разное соотношение тормозных сил RX1 и Rx2 при торможении с различной интенсивностью. Указанное требование трудно выполнимо, и большинство автомобилей имеют тормозные системы, обеспечивающие постоянное соотношение тормозных сил. У таких автомобилей колеса переднего и заднего мостов блокируются неодновременно. Этот недостаток устраняют путем применения противо- блокировочных устройств и регуляторов, описанных ниже.
Если заторможенные колеса еще продолжают вращаться (не заблокированы), то реакции R^ и Rxi можно считать приблизительно пропорциональными тормозным моментам:
= M70V1/r, (22)
Rx2 = Мторз /г, (23)
где М,гор! и А4тор2 — тормозные моменты на колесах иереднего и заднего мостов.
величины тормдоныл моментов заимел I \J1 num-ipj aUflfi ivrii тормозной системы, ее технического состояния и от управляющего воздействия водителя {силы и темпа нажатия на орган управления).
где Кг и Кг — скорости нарастания тормозных сил; для тормозных систем с гидроприводом они равны 15—30 кН/с, с пневмоприводом 25—100 кН/с.
Изменение реакций Rxl и Rx2 по времени показано на рис. 9, а сплошными линиями. Величины Ki и /Са, обусловливающие значение этих реакций и относительное расположение соответствующих им линий на графике, зависят от типа автомобиля. У легковых автомобилей центр тяжести расположен примерно посередине базы. При их торможении нагрузка на передний мост больше, чем на задний; для более полного использования сцепления передних шин с дорогой тормозную систему конструируют так, чтобы обеспечить Ki > > /С2. У грузовых автомобилей и автобусов основная часть нагрузки (до 70%) приходится на задний мост, и тормозная сила, действующая на него, должна расти быстрее, чем тормозная сила, действующая на передний мост (Кг <С /С2).
Увеличение тормозного момента, приложенного к колесу, вызывает рост касательной реакции, который продолжается до тех пор, пока она не достигнет максимального значения, обусловленного сцеплением шины с дорогой. Предельные значения касательных реакций РСц| и Р0ца определяются формулами (20) и (21).
Нормальные реакции дороги R& и Rz%, действующие на передний и задний мосты автомобиля, в свою очередь зависят от интенсивности торможения, изменяясь с изменением замедления "/*•
(26)
Ри = Я XI + R х2 = (Ki + К*) t
и
ф*;
сц1
(28)
сц2
4>х-
Таким- образом, в первый период торможения предельное значение касательной реакции (силы сцепления) на колесах переднего моста увеличивается^ с течением времени, а на колесах заднего уменьшается. Если считать коэффициент сцепления постоянным, то силы Ясд1 и Рсц2 после начала торможения изменяются пропорционально времени, как показано на рис. 9, а штриховыми линиями.
За время tnl касательная реакция на колесах одного из мостов (чаще всего заднего) достигает предельного значения по условиям сцепления, и колеса этого моста блокируются (точка А). После этого касательная реакция на передних колесах по-прежнему растет (точка А') в соответствии с формулой (20), а реакция Rxi (участок А В) уже не зависит от тормозного момента. Водитель может прикладывать к педали сколь угодно большое усилие, все равно эта реакция будет уменьшаться с течением времени, оставаясь равной силе сцепления. Однако уменьшение касательной реакции на задних колесах вызывает уменьшение силы инерции Ра, что в свою очередь, отражается на динамическом перераспределении нагрузок и величинах нормальных реакций дороги.
Сила инерции автомобиля после блокировки колес заднего моста
КОНСТРУКТИВНАЯ 2
безопасность автомобиля 2
Pen = Ga<px/(L — <р*/1д). 69
б) 74
°оор" V Лц+0.5еде 79
CW = °'5В*8 = Г (68) 83
X —fir X 0Лк + 1—rjr) 83
К — (L об — £ф)/Хф. 133
kon = faNn + k,NT + 63//с)/(Л/л + Nr + А/0 + /V„), 157
h = Д/е, 185
Р = MvH (2Sn), 184
где S0 — перемещение автомобиля за время /с; <SH — перемещение автомобиля за время /н. Остановочный путь автомобиля
So = Sp + Sc + SB +
(53)
где Sp — перемещение автомобиля за время реакции водителя /р.
Если у автомобиля блокируются только колеса заднего моста и мощность тормозных механизмов недостаточна для доведения передних колес до юза, то справедливы выражения (35)—(39) и (41)— (44). Однако время tH следует определять не по формуле (40), а по выражению
*н = flxim.*/tfi. (54)
Замедление на третьем этапе в этом случае
бДфх + А*! щах ,1П .ggv
/3 ~ (1+ЛцФх)М '
Величина замедления, определенная по последней формуле, меньше вычисленной по выражению (46).
Рис.
10. Тормозные диаграммы автомобиля:
a
—
расчетная;
б — экспериментальная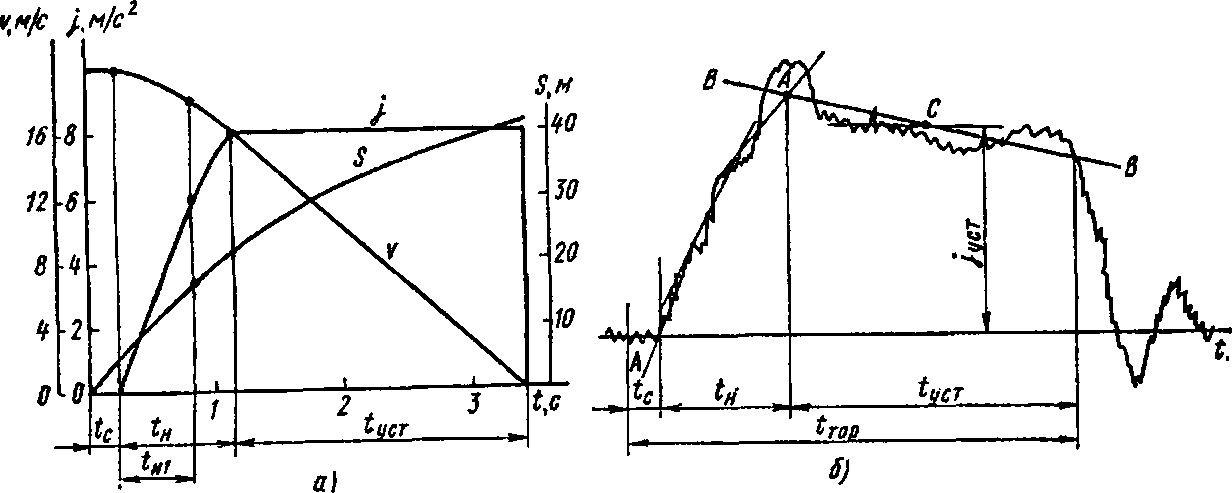
Полученные формулы дают возможность определять скорость, замедление и путь автомобиля в любой момент торможения. На рис. 10, а в качестве примера показано изменение замедления грузового автомобиля по времени (тормозная диаграмма), определенное для следующих данных: М — 8000 кг; a = 2,5 м; Ь ~ 1,5 м; hц = 0,7 м; <рх = 0,7; Кх = 30 кН/с; Кг = 50 кН/с; /с = 0,2 с.
Если максимальные значения Rxx и Rxi ограничены только сцеплением шин с дорогой, то продолжительность первых двух периодов торможения невелика по сравнению со временем полного торможения. Так, в данном примере время /н1 от начала снижения скорости до блокировки колес заднего моста равно приблизительно 0,5 с. Колеса переднего моста блокируются после этого еше через 0,3 с, продолжительность третьего периода равна 2,3 с, а общее время торможения составляет 3,1—3,2 с. Скорость автомобиля при t = tnX уменьшается с 20 до 18,3 м/с, а при t — tu — до 16,1 м/с. Перемещение автомобиля за время tH равно 17,8 м, а за время *уст 16 м. Общий тормозной путь составляет около 40 м.
Если максимальные значения реакций ограничены конструкцией тормозной системы и составляют, например, Rxlmax = 15 кН й Кх-гтах — 25 кН, то максимальное замедление автомобиля падает с 7 до 5 м/с2, время торможения возрастает до 4,6 с, а тормозной путь до 52 м.
Сравним расчетные данные с экспериментальными. На рис. 10, б показана тормозная диаграмма аналогичного автомобиля, полученная во время дорожных испытаний. Как видно на графике, в действительности замедление в течение времени /н может изменяться не по линейному, а по другому, более сложному закону, и начало блокировки колес заднего моста трудно установить. В течение времени /уст замедление не остается постоянным, а после остановки автомобиля кривая проходит ниже оси абсцисс. Последнее вызвано колебаниями кузова на подвеске, в котором установлена регистрирующая аппаратура.
При обработке экспериментального графика кривые линии аппроксимируют линиями АА и ВВ, точку пересечения которых считают началом установишегося торможения. Величина замедления в третьем периоде определяется ординатой точки С, расположенной посередине аппроксимирующей линии ВВ.
Формулы (34) и (55) учитывают основные факторы, влияющие на процесс торможения, в том числе конструктивные особенности автомобиля: массу, положение центра тяжести, базу, скорости нарастания тормозных сил и т. п. Если известны /с, /н и /уст, то тормозной путь можно рассчитать следующим образом.
Предположим, что в течение времени /н автомобиль движется равнозамедленно с замедлением, равным 0,5/усх, и найдем скорость t>2, соответствующую началу замедления:
= v0 0,5/уст/ц-
Перемещение автомобиля за время tH SH = v0tB 0,25/уСТ/| л? v0tu.
Перемещение автомобиля за время /yQT
Sy0T = v\l(2/уст) « уВ/(2/'усТ) — 0,5у0/и.
Следовательно, полный тормозной путь 5Х = 5С + 5„ + 5уст - г>о (/с + 0,5/ц) + ^/(2/Уст)
Остановочный путь автомобиля
So = (/Р + /с + 0,5/н) + иВ/(2/уст).
При полном использовании сцепления с дорогой всеми колесами автомобиля замедление определяют по формуле (46), тогда остановочный путь
S0 = (/р + /с + 0,5/ц) v0 + vV(2g4>x).
Как указывалось выше, у многих автомобилей достичь одновременной блокировки всех колес не удается как по причинам конструктивного характера, так и вследствие ухудшения эффективности тормозной системы и шин в процессе эксплуатации. Поэтому для приближения результатов расчета к фактическим данным в формулы вводят поправочный коэффициент К9 — коэффициент эффективности торможения. Примерные значения его для сухого асфальто- или цементнобетонного покрытия (фх = 0,7) даны в табл. 5.