

К¾ш беретiн аралыº магниттi к¾шейткiшi бар эж
АМК(аралыº магниттi к¾шейткiш) жылдамдыºты ¼згерту диапазонын 100:1 ºатынаста ¼згертудi талап ететiнiн металлкесушi станок т.с.с. ºуатты механизм бередi. АРЖ(автоматты реттеушi ж¾йесiнде) пайдаланылады. АМК(суретте) º½рамына ¸рбiр фаза¹а ºосºостап тiркелген W1 ºуатты орамдары ºарсы ж¸не параллель ºойыл¹ан В1 вентильдерден ж¸не олар¹а ºосылатын к¼пiр схемасымен орындал¹ан В2 айнымалы ток т¾зеткiшi кiредi. ²оз¹алтºыштың якорь орамы В2 т¾зеткiшiнiң ºосºыштарына тiркеледi, ал ºоздыру орамы басºа(схемада к¼рсетiлген) сыртºы т¾зеткiштен ºоректенедi. Фазалыº ºуатты орамдар W2 керi байланыс ж¸не басºарушы орамдар ж¸не W3 ы¹ыстырушы орамдар кигiзiлген б¼лек жеке т½йыºтал¹ан болар ¼зекшелерге орналасады
Сурет 7-29 АМК менен т½йыºтал¹ан АРЖ схемасы.
Кернеудi реттеу ж½мысшы орамдарының индуктивтiк кедергiсiн ¼згертетiн АМК ¼зектерiн магниттеп арºылы ж¾ргiзiледi. Басºарушы орамда¹ы магниттеушi ток не¹½рлым к¼п болса, ж½мысшы орамдардың кедергiсi со¹½рлым азайып, АМК шы¹ысында¹ы кернеу, я¹ни, якорьдегi кернеу артады ж¸не осы¹ан орай ºоз¹алтºыштың айналу жылдамды¹ы к¼бейедi.
Т½йыºтал¹ан АРЖ(автоматты ж¾йенi реттеушi) ж½мысшы т¼мендегi принципте ж¾редi. Берiлген кернеу Uá П3 потенциометрiнен кернеудi б¼лгiш алынып, ТГ тахометра келген Uê.á. керi байланыс кернеуiмен салыстырылады(теңестiрiледi). Жиынтыº кернеу Д1, Д2 тектеушi диодтарынан транзисторлы к¾шейткiштiң кiрiсiне берiледi. К¾шейткiш шы¹ысында¹ы сигнал басºарушы орам¹а берiледi, ол о¹ан ж¾рген ток АМК шы¹ысында¹ы т½раºты кернеудiң шамасын аныºтайды. Ы¹ыстыру кернеуi АМК-ның ''кiрiс-шы¹ыс'' сипаттамаларының басжа¹ында¹ы б¼лiгiн, я¹ни, ж½мысшы орамда¹ы токтың басºарушы к¾шейткiштiң то¹ына т¸уелдiлiгiн сызу ¾шiн ºажет. АМК(аралыº магниттi к¾шейткiштi) т½йыºтал¹ан АРЖ-ның механикалыº ºарапайым сипаттамасы суретте келтiрiлген).
Тиристорлы т½раºты ток ЭЖ ºоз¹алтºыштың òîºòû, æ¸íå айналу моментiн жектеу т.с.с. ºажеттi бол¹анда жылдамдыºты реттеу диапазонын ¾лкен механизмдер ¾шiн пайдаланылады. суретте сериялары ПБСТ немесе ИПО(ИФО) ТТ²-ты ЭТЗР сериялы тиристорлы ЭЖ схемасы келтiрiлген.
Жылдамды¹ы бойынша терiс керi байланысты, тогы сызыºтыº емес т½йыºтал¹ан АЖР ТТЖ бiлегiндегi моменттi ж¸не якорьдегi токты жектеу ¾шiн, реттеу диапазоны 2000:1 аралы¹ында механикалыº(ºарапайым) сипаттама т¾рiнiң орныºтылы¹ын ºамтамасыз етедi.
Реверсивтi ТТ тиристорлар т¾рлендiрген вентильдерден екi тобынан(Т1, Т3, Т5) ж¸не(Т2, Т4, Т6) Дð1 æ¸íå Äð2 òåңåñòiðóøi Äð3 дроссельден т½рады.
Берiлетiн кернеу Uá, жылдамдыº бойынша Uê.á. керi байланыс кернеуiмен бiрге Д3Т2 диодты шектегiшi бар теңестiрушi т¾йiнге берiледi. Жиынтыº кернеу КБ(к¾шейтушi блок) к¾шейткiшiң кiрiспе БУН(кернеудi к¾шейтушi блок) блогында ¼ндiрiлген т¾рi араж¾зiне ½ºсас кернеумен ºабаттаса берiледi. Осы кернеулердi айырмасы тиристорлармен басºару б½рышын, ТТ(тиристорлы т¾рлендiргiш) шы¹ысында¹ы кернеудi, демек, ТТ²-ның айналу жылдамды¹ын аныºтайды.
Механикалыº сипаттамалардың ºажеттi орныºтылы¹ы ТГ тахогенератордың к¼мегiмен ж¾зеге асырылатын жылдамдыº бойынша ºатаң терiс керi байланыстың орныºтылы¹ымен ºамтмамсыз етiледi. Схемада токты шектеушi РП1 ж¸не РП2 релердi ºарастырыл¹ан. Олар токтың ºажеттi м¸нiнде, ЭЖ-тi якорьдегi токтың т½раºты м¸нiнде(1,5-2Ií) ж¾ргiзудi ж¸не токтың шамадан тыс ¾лкен м¸ндерiнен ºор¹ауды ºамтамасыз етедi.
сурет 7-30 ЭТ3Р сериялы тиристорлы ЭЖ схемасы.
Сурет7-31Э² микропроцессормен басºаратын схемасы.
Микропроцессормен басºарылатын т½раºты токтың ÝÆ Ж½мыс iстейтiн техникалыº механизмдердiң ж½мысшы органдарының артын ауыстыру ж¸не д¸л ба¹ыттау ¾шiн микропроцессормен басºарылатын электржетек ºойылады. суретте ЭПМПУ типтес аналогты-цифрлы т¾йiндерi бар схема келтiрiлген. Т½раºты ток ºоз¹алтºышты М, VS1- VS6 ж¸не VS7- VS12 тиристорларында орындал¹ан реверсивтi т¾рлендiргiштен ºоректенедi. М ºоз¹алтºышы, ж½мысшы органмен, ТГ тахогенераторымен аныºтайтын датчикпен байланысºан. Якорьдегi токты баºылау ток датчигi к¼мегiмен ж¾зеге асырылады.
ЭПМПУ-дiң ж½мысы. Ж½мысшы органның координатын реттеуге ба¹ыныңºылыº негiзiнде т½р¹ызыл¹ан. Онда жылдамдыº бойынша(ТГ тахогенераторы ж¸не ЖР жылдамдыºты реттеушi ж¸не ток бойынша(ДТ ток датчигi мен ТР токты реттеушi) керi байланыс бар VD1, VD2 стабалатронды ТТ² айналу моментiн ж¸не ток м¸нiн шектеудi ºамтамасыз етедi.
Микропроцессор ж¾йесiне МП микропроцессоры ОЗУ ж¸не ПЗУ есте саºтаушы º½рыл¹ылары, УС1-УС3 ºолдаушы º½рыл¹ылары, ДП орнын аныºтаушы цифрлы датчик берiлген жылдамдыººа сай шы¹ысты¹ы сигналды ºамтамасыз ететiнЦАТ цифрлы-аналогиясы т¾рлендiргiш кiредi. Орнын(к¾йiн) аныºтайтын сигнал УС3-ºосушы º½рыл¹ы арºылы Т терминалынан берiледi. ЭЖ-тiң ºоз¹алысының орныºты графигi ПЗУ еске саºтаушы º½рыл¹ыда жазылып цифрлы реттегiштiң ж½мысын аныºтайды.
Реттегiштен шы¹атын басºарушы кернеу Uá импульстi-фазалы басºару ж¾йесiне(Ц³БЖ) берiледi, ол ТГ тиристорлы айналу жылдамды¹ын аныºтайды.
МПЖ(микропроцессор ж¾йесiнiң) ºызметiн атºаратын микро ЭЕМ(микроэлектрондыº есептеу машинасы немесе, ''Электроника К1-20'' типтес программаланатын(ба¹дарлама) контроллер т.б. пайдаланылады.
²АДА±АЛАУ ЭЛЕКТРЖЕТЕГI
Басºару сигналының ¼з бетiмен ¼згеруiне байланысты ж½мыс машиналарының атºару м¾шелерiнiң ºоз¹алысын берiлген д¸лдiкте ºамтамасыз ететiн электржетек ºада¹алау электржетегi деп аталады. Б½л басºару сигналы кең к¼лемде ¼згеруi м¾мкiн. К¼бiне кiрi сигналы остiң немесе бiлiктiң жылдамды¹ы немесе бiлiктiң б½рышы болып келедi. ²ада¹алау электржетегi радиотелескоптың спутниктiк байланыс ж½йесiнiң антеннасы ¾шiн, к¼шiру станоктарда, монипулятор мен роботтардың атºару м¾шелерiнiң жетегiнде ж¸не т.б. ºолданылады.
²ада¹алау электржетегiнiң структуралыº с¾бесi 7-22 суретте к¼рсетiлген. Ол кiру ж¸не шы¹у сигналдарының I ж¸не 2 электр энергиясы
 3
3
О кiр Uкiр U U
кiр Ukik
7-32 сурет. Ба¹дарламалы басºару ЭЖ ºарапайым структуралыº с¾бесi.
датчигiнен, 3 келiспеу ¼лшеуiшiнен, 4 басºару ж¾йесi мен ж½мыс машинасының атºару м¾шелерiн ºоз¹алысºа келтiретiн механикалыº берiлiстi электроºоз¹алтºышынан /5/ т½рады.
Кiрiс ж¸не шы¹ыс шамаларының датчигi механикалыº датчигi механикалыº шаманы электрлiк шама¹а – кiрi сигналы Uкiр ж¸не керi байланыс Uº.б. т¾рлендiредi. 3 келiспеу ¼лшеушi б½л сигналдарды алгебралыº т¾рде ºоса отырып электроºоз¹алтºыш арºылы басºару ж¾йесiне берiлетiн келiспеу сигналын UА ºорытып шы¹арады. ²ада¹алау электржетегi ¼зiнiң структурасы бойынша, автоматтандырыл¹ан т½йыº ж¾йе болып табылады. Басºару ж¾йесi 4 к¾шейткiштен ж¸не к¾штiк т¾рлендiргiштен т½рады.
Электроºоз¹алтºыш пен механикалыº берiлiс 5 ¼згеру заңына U(t) с¸йкес атºару органдарының ауысын ºамтамасыз етедi.
²ада¹алау электрожетектерiнiң классификациялары бiрнеше белгiлер бойынша орындалуы м¾мкiн. Егер ºада¹алау электржетегi атºару органдарының жылдамды¹ын берiлген д¸лдiкпен жеткiзу ½шiн ºолданылса, онда осы жылдамдыºты деп, ал егер орныºты болса – онда позициондыº деп атайды.
7-9. БА±ДАРЛАМАМЕН БАС²АРЫЛАТЫН
ЭЛЕКТРЖЕТЕГI
Ба¹дарламамен басºарылатын электржетегi деп ж½мыс машиналараның атºару органдарының ºоз¹алысы алдын ала берiлген ба¹дарлама бойынша ж¾ретiн электржетегiн айтамыз.
Б½ндай электржетектерi к¼бiне металл ¼ңдегiш станоктарында, детальдарды ¼ңдеген кезде ºолданылады.
Ба¹дарламаны басºаруды ºолдан¹ан кезде детальды ¼ңдеуден б½рын ба¹дарлама º½рылады. Б½л ба¹дарлама º½рал-сайман ауысу т¸ртiбi, столдың ºажеттi ºоз¹алысы , º½рал-сайманның ж½мыс режимi ж¸не т.б. технологиялыº шамалар берiледi. Содан кейiн станоктың атºару м¾шелерiнiң электржетектерi осы ба¹дарламаны басºару асырады.
7-23суретте ба¹дарламаны басºару электржетегiнiң ºарапайым структуралыº с¾бесi к¼рсетiлген . Ол екi б¼лiмнен
сурет
сурет
7-33 сурет. Сансыз ба¹дарламалыº º½рыл¹ы ЭЖ.
7-34 сурет. ЭЖ адаптивтiê áàñºàðó ñ¾áåñi.
басºару сигналын ºортып шы¹аратын ба¹дарламалыº º½рыл¹ыдан Б² ж¸не ºажеттi жа¹дайларда атºару органдарының орнын ¼згерте отырып, осы басºару сигналын iске асыратын электржетегiнен т½рады. Б½л екеуiн Б² мен Э² бiрiктiрiп ба¹дарламалы басºару ж¾йесi БЖ I деп атайды.
БЖ-нiң электржетегi ретiнде т½раºты ж¸не айнымалы ток ºоз¹алтºыштарының кез-келген т¾рiн ºолдану¹а болады.
Барлыº ба¹дарламалыº º½рылыстар екi топºа-сандыº ба¹дарламалыº º½рылы¹ы ж¸не сансыз ба¹дарламалыº º½рыл¹ы¹а б¼лiнедi.
а/. Сансыз ба¹дарламалыº º½рыл¹ылы электржетегi.
Ба¹дарламалы басºаруда¹ы м½ндай электржетектер атºару м¾шелерiнiң ºоз¹алысы ºайталанбалы бiрдей цикл алу ¾шiн ºолданылады. М½ндай электржетектерiнiң ба¹дарламалыº º½рылымы ¸рт¾рлi релелiк контактылыº ж¸не контактысыз аппараттарды соң¹ы ж¸не жолды ажыратºыштар , адымдыº iздегiштердi ºолдану арºылы iске асырылады.
7-34 суретте ºарапайым сансыз БЖ-ның мысалы келтiрiлген. Б½л ж¾йеде электржетегi М,А элементiн / мысалы строгалды станоктың стопоры/ ºоз¹алысºа келтiредi. А элементiнiң соңында SQI ж¸не SQ2 соң¹ы ажыратºыштарды орналасºан. Олар КТ ж¸не К2 контакторларымен SВI, SВ2 бiрге ºоз¹алтºышына басºару с¾бесiн º½рады. КI контакторы ºосыл¹ан кезде М ºоз¹алтºыш А элементiнiң ºоз¹алысын ºажеттi ба¹ытºа "Ал¹а", ал К2 контакторы ºосыл¹ан кезде "Артºа" ºоз¹алысºа келтiредi.
Бастапºы жа¹дайда А элементi орталыº жа¹дайда ж¸не соң¹ы ажыратºыштардың ешºайсысы ºосылма¹ан деп алып 7-34 суреттегi с½бесiнiң ж½мысын ºарастырайыº. Ең алдымен SВI кнопкасын басамыз, сонда КI контакторы ºосылады ж¸не ºоз¹алтºыш М ºоректiк желiге ºосыла отырып, А элементiнiң "Ал¹а" ºоз¹алуын ºамтамасыз етедi. А элементi соң¹ы ажыратºышºа 2 келген кезде ж¸не о¹ан ¸сер жаса¹анда КI контакторының ºоректену тiзбегiнде ¾зiлiс болады да К2 контакторы ºоректену желiсiне ºосылады. Осы аппараттардың ауысып ºосылуы арºасында ºоз¹алтºыштың М якорiндегi ºарама-ºарсылыº таңбасы керi ¼згерiп, ºоз¹алтºыш керi жаººа ºарай айнала бастайды. А элементi "Артºа" ба¹ыты мен ºоз¹алады. А элементi соң¹ы ажыратºышºа SQI келiп, о¹ан ¸сер еткен кезде контактор К2 ажырайды да КI ºосылады, осының арºасында А элементi ºайтадан "Ал¹а " ба¹ытында ºоз¹ала бастайды. Осындай циклдыº ºоз¹алыс SВ2 кнопкасын басºан¹а дейiн ºайталана бередi.
Циклдыº ББЖ-нiң д¸л тоºтауы соң¹ы ажыратºыштарымен аныºталады да, м¼лшермен 0,05 мм болады.
б/. Сандыº ба¹дарламалы басºарылмалы электрожетек СББ электржетегi болаша¹ы бар ж¸не ¸мбебап ББЖ болып табылады. Ол ¸рт¾рлi заттарды станокта ¼ңдеуге ж¸не сонымен ºатар еңбек ¼нiмдiлiгi мен ¼ңдеу сапасын арттыру ¾шiн кеңiнен ºолданылады. СББ-лы электржетектi ºолдан¹ан кезде затты ¼ңдеудегi барлыº технологиялыº берiлiстер - жылдамдыº ж¸не заттың орын айыстыру шамалары, олардың ба¹ыты , операцияларының ж¾йелiлiгi ж¸не т.б. сан ретiнде берiледi. Барлыº сандар бiрiгiп берiлген заттың ¼ңдеу ба¹дарламасын º½райды. Олар алдын-ала ºажеттi жа¹дай¹а келтiрiлiп есептелiнедi, кодталады да ºандай да бiр ба¹дарлама ж¾ргiзушiге кiргiзiледi. /перфолента¹а, перфокарта¹а, магниттi лента¹а/. Затты ¼ңдеуден б½рын ба¹дарлама адамның ºатынасынсыз заттың ¼ңделуiн ºамтамасыз ететiн электрожетегiнiң ба¹дарламалыº, º½рылысына кiргiзiледi. Ал басºа затты ¼ңдеу ¾шiн тек ºана ба¹дарламаны ауыстырса бол¹аны. Б½л ¼ңдеу уаºытын ºысºартады.
ББЖ ж¾йесi аналогтың /¾зiлiссiз/ ж¸не дискерттiк /импульстыº/ болып екiге б¼лiнедi. ББЖ-ның аналогтiк ж¾йесiне заттың ¼ңдеу ба¹дарламасын º½райтын сандар жиыны, ºандай да бiр ¾зiлiссiз ¼згеретiн аналогтыº физикалыº шама¹а т¾рлендiрiледi. Т½раºты тоº кернеуi , желiге немесе синусоидалыº кернеу амплитудасына ж¸не т.б. де электр жетегiнiң кiрiстiк, басºару сигналы болып табылады.
ББЖ-ын дискреттiк ж¾йесiнде ба¹дарлама соңында басºару импульсºа º½рал-сайман немесе заттың ºандайда бiр ºоз¹алыс шамасы с¸йкес келедi. Импульстардың саны ауыстыру ма¹ынасын, ал оның жиiлiгi – орын ауыстырудың жылдамды¹ы болып табылады.
ББЖ ж¾йесi ¸детте екi режимнiң бiреуiнде ж½мыс iстейдi; позициялау режимiнде немесе контурлыº ¼ңдеу режимiнде, ББЖ-ның позициялыº /координаталыº/ ж¾йесi º½ралдарының затºа байланысты д¸л орналасуы немесе оның т¾зу сызыºты ºоз¹алыста болуын ºамтамасыз етедi. М½ндай режимдер жону кезiнде б½р¹ыла¹ан кезде немесе бiрнеше тесiктi ¼ңдеген кездерде ж¸не де ºайра¹ан кездерде ºажет болады. Б½л жа¹дайда º½рал немесе зат º½ралдың орнатыл¹ан н¾ктелерi арасында ºысºа, т¾зу сызыºты жолмен орын ауыстырады. ББЖ-ның контурлыº ж¾йесi º½ралдың немесе заттың еркiн траекториясы бойынша орын ауыстыруын ºамтамасыз етедi.
ББЖ ж¾йелерi т½йыº ж¸не ашыº болып келуi м¾мкiн. Т½йыºтал¹ан ж¾йелерде датчиктердiң к¼мегiмен º½ралдың немесе заттың орындары ¼лшенедi де б½л ¼лшенiп алын¹ан керi байланыс сигналы т¾рiндегi хабар салыстыр¹ыш º½рылымына берiледi де м½нда ол ба¹дарламалыº º½рылысының басºару сигналымен салыстырылады.
Егер ¼лшенiп отыр¹ан орны берiлгеннен ¼згеше болса электр жетегiнiң басºару ж¾йесiне º½ралдың немесе заттың коррекциясын ºамтамасыз ететiн ºосымша басºару сигналы келiп т¾седi.
Сондыºтан да ББЖ-ның т½йыºтал¹ан ж¾йесi затты ¼ңделуiнiң ¼те д¸лдiгiн ºамтамасыз етедi.
ББЖ-ның ашыº ж¾йелерiнде º½рал мен заттың ºоз¹алыстары баºыланбайды ж¸не берiлген сигналмен салыстырылмайды./
Сондыºтан, ж¾йенiң параметрлерiнiң кездейсоº ¼згеруi немесе ºандай да сыртºы ¸серлерi мысалы, жетектiң бiлiгiндегi кедергi моментi, ба¹дарламаның д¸л iске асуын т¼мендетедi. Со¹ан ºоса ашыº ж¾йелерi т½йыº ж¾йелерге ºара¹анда ºарапайым болып келедi.
7-10. АДАПТИВТI /´ÇÄIÃIÍÅÍ ÊÅËÒIÐIËÅÒIÍ/
БАС²АРЫЛАТЫН ЭЛЕКТРЖЕТЕГI
Жо¹арыда, ж½мыс машиналарының атºару органдары мен ¸серлердiң сипаттамалары аныºтал¹ан ж¸не толыº белгiлi деп алын¹ан электржетектердiң ж¾йелерiн ºарастырдыº. Б½¹ан ºоса б½л ¸серлер мен сипаттамалар кейбiр жа¹дайларда уаºыттың ¼туiмен кең к¼лемде белгiсiз жа¹дайда ¼згеруi м¾мкiн. Б½лардан басºа, сипаттамалары алдын ала белгiсiз немесе жеткiлiктi т¾рде аныºтау м¾мкiн емес болатын ж½мыс машиналары ¼нерк¸сiптiк механизмдер бар.
Б½ндай жа¹дайларда ж½мыс машиналарының сапалы технологиялыº º½былыстарын ºамтамасыз ету ¾шiн, ж½мыс º½былысы кезiнде автоматты т¾рде электржетектiң ж½мысын коррекциялау /ºосымша келiтру/ маºсатымен, келiп т¾скен ¸серлер мен оның наºты ж¾рiсi туралы хабарды толыºтыру ºажет.
Б½л коррекция параметрлердi немесе электржетегiнiң басºару ж¾йесiнiң структурасын ¼згерту арºылы iске асырылады.
Басºару ж¾йелерiн функциялау т¸сiлi ж½мыс машиналарының технологиялыº к½былыстарының жаºсы ж¾руi ¾шiн автоматты ж¸не ºандайда бiр маºсатпен ¼згерту электржетегi адаптивтi немесе ¼здiгiнен келтiрiлмелi басºарылмалы электржетегi деп аталады. Электржетегiнiң басºару ж¾йелерiнiң функциялау т¸сiлiнiң автоматты т¾рде ¼згеруi адаптациялау немесе ¼здiгiнен келтiрiлу деп аталады.
Адаптивтi басºарылатын электржетегiнiң ж½мыс º½былысы мынадай басты ¾ш есептi аныºтау арºылы сипатталады;
1. Технологиялыº º½былыстың барсы мен ауытºуы туралы хабарларды алу.
2. Басºару ¸серлерiн ¼ңдеу.
3. Басºару ¸серлерiн ¼ңдеуiне с¸йкес электржетегiнiң басºару ж¾йелерiнiң структурасын параметрлерiн ¼згерту. Адаптивтi басºарылатын электржетегiнiң ж½мысында б½лар ¸рт¾рлi т¸сiлдермен шешiлуi м¾мкiн.
1. Технологиялыº º½былыс пен сыртºы ¸серлердiң сипаттамалары туралы хабар ж½мыс машиналары мен электржетегiнiң ºалыпты функциялау жа¹дайымен немесе ж¾йенiң кiруiне арнайы байºалатын сигнал беру жолымен алынуы м¾мкiн. Екiншi жа¹дайда байºалатын сигнал генераторы болуы керек. ²алыпты функциялау жа¹дайында хабарды сыртºы ¸серлердi ¼лшеу арºылы немесе реттелушi шама бойынша керi байланыс кiргiзу арºылы алу¹а болады.
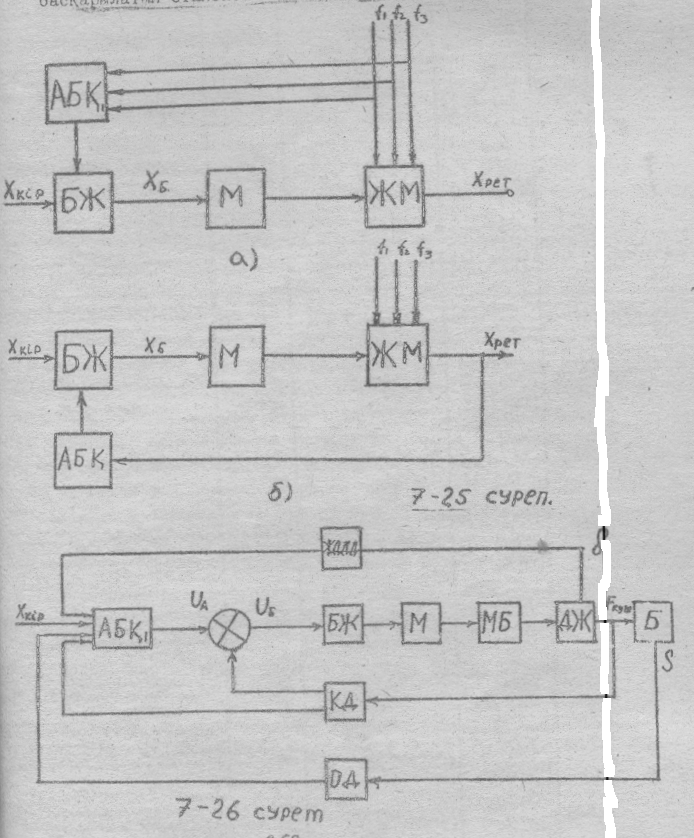
7-25,а суретiнде бiрiншi т¸сiлдi iске асыратын структуралыº с¾бе келтiрiлген.
Ж½мыс машинасына ЖМ ¸сер ететiн сыртºы ¸серлер f1,f 2,f3 адаптивтi басºару º½рылысының кiрiсiне келiп т¾седi. Б½л º½рыл¹ының басºару сигналы , ºоз¹алтºышºа басºару ¸серлерiнiң Х ¼згеруi арºасында сыртºы ¸серлерiнiң компенсациясындай параметрлерi мен структураларын да ¼згерiстер ту¹ызады да, басºару ж¾йесiне БЖ ¸серiн тигiзедi.
Б½ндай т¾рдегi с¾белер басºалар¹а ºара¹анда ºарапайым, ¼лшенетiн ауытºулар¹а тез к¼ңiл аудару¹а жа¹дай жасауды, бiраº м½нымен ºатар ауытºулардың барлыº т¾рлерiн ¼лшеуге жа¹дай жасамайды.
7-25,б суретiнде ¼здiгiнен келтiрiлетiн т½йыºтал¹ан тiзбегiнiң /керi байланыс/ структуралы с¾бесi келтiрiлген. Б½л с¾беде адаптивтi басºару º½рылымы реттелетiн координатының Х шамасы бойынша технологиялыº º½былыстың барысы туралы хабарлар алады ж¸не электржетегiнiң басºару ж¾йесi ¾шiн ºажеттi басºару сигналын жасап шы¹арады.
Кейбiр адаптивтi басºарылатын электржетектерiнде хабарлар алудың екi т¾рi де ºолданылады.
2.Электржетегiнiң басºару ж¾йесiне басºару сигналы берiлген технологиялыº º½былысының сапасы бойынша º½рылады, мысалы ж½мыс машинасының ең жо¹ары ¼нiмдiлiгi т.б. бойынша. Жалпы жа¹дайларда адаптивтi басºару º½рыл¹ысы осы сапа к¼рсеткiштерiн берiлген м¼лшерде ½стап т½руы немесе оның экстремальдыº шамасын алуы ºажет /экстремальды ж¾йе/.
Т½раºтандыру ж¾йесi к¼бiне технологиялыº º½былыстардың моделiн ºолдану арºылы орындалады. Оның ж½мысының маºсаты ж½мыс машинасының шын м¸нiндегi технологиялыº º½былыстарының сипаттамасы мен осы технологиялыº º½былыстың моделiнiң к¼мегiмен маºсатºа с¸йкес º½былыс сипаттамаларының бiр-бiрiне жаºынды¹ымен ж¾ргiзiледi.
Экстремальдi ж¾йелерде басºару ж¾йесiнiң параметрлерi технологиялыº º½былыстардың берiлген сапа к¼рсеткiштерi экстремальды шама¹а жететiндей етiлiп келтiрiледi. ²азiргi кезде класификациялары ¸рт¾рлi белгiлерге ºарап келтiрiлген к¼птеген экстремальды ж¾йелер бар.
Сапа к¼рсеткiштерiнiң шамалары бойынша хабар алу т¸сiлi бойынша экстремальды ж¾йелер iздегiштi ж¸не iздеусiз болып екiге б¼лiнедi. Iздегiш ж¾йелерде сапа к¼рсеткiштерiн аныºтау ¾шiн ж¾йеге ºосымша iздеушi сигналдар кiргiзi арºылы iске асады, ал iздеусiз ж¾йелерде б½л к¼рсеткiш арнайы есептегiш º½ралдың к¼мегiмен аналитикалыº т½рамен есептелiнедi.
Iздегiш ж¾йелер iздеу т¸сiлi бойынша ¼з алдына электремумды автотербелiстi ж¸не ыºтиярсыз iздеу болып екiге б¼лiнедi. Егер iздеу сигналдары ж¾йенiң ¼зiмен берiлсе, онда ол экстремумды автотербелiстi iздегiш экстремальды ж¾йеге жатады. Iздегiш сигналдарының арнайы к¼зiн ºолдан¹ан кезде экстремальды ж¾йе экстремумды ыºтиярсыз iздеу ж¾йелерiне жатады.
Сапа к¼рсеткiштерiне байланысты болып келетiн айнамалылардың м¼лшерi бойынша экстремальды ж¾йелер бiр ¼лшемдi ж¸не к¼п ¼лшемдi болып б¼лiнедi.
Электржетегiнiң бейiмделуi /адаптациясы/ к¾шейткiштiң коэффициентiн, уаºыт т½раºтылы¹ы ж¸не басºа да звеноларының параметрлерi мен басºару сигналдарының арºасында болатын басºару ж¾йелерiнiң структураларының ¼згеруi арºасында ж¾ргiзiледi.
Экстремальды ж¾йенi алу ¾шiн мысал ретiнде ажарлау станогiнiң жiберушi электржетегiнiң ºарастырайыº. Станокта¹ы б¼лшектi ажарлау º½былысының ерекшелiгi болып ¸рт¾рлi, алдын¼ала айту¹а болмайтын б¼лшектiң ¸дiптеу шамасы мен б¼лшектi ¼ңдеудегi ажарлау доңгелегiнiң желiнуi болып табылады. Станоктың ең жаºсы ¼нiмдiлiгiн ажарлау станогiне берiлетiн ж¾ктеме ¼ңдеу сапасының шарты бойынша т½раºты ж¸не максимал м¾мкiн бол¹ан кезде алу¹а болады. Б½л ½шiн металдың ¼ңделу жылдамды¹ы диаметрi мен ¸дiптеу размерi функциясының реттелуi ºажет. ²арастырылып отыр¹ан мысалда б½л станоктың к¼лденен берiлу электржетегiнiң адаптивтiк басºару жолымен алу арºылы iске асырылады. 7.25 суретте структуралыº с¾бесi к¼рсетiлген.
7-26 суреттегi с¾бенiң º½рамында механикалыº берiлiс арºылы ажарлау келтiретiн ШК электр ºоз¹алтºышы М, ¼ңделу б¼лшегi Д кiредi. Электржетегi º½рамында к¾штiк тиристорлыº т¾рлендiргiш пен аралыº басºару сигналының к¾шейткiшi бар И басºару ж¾йесiмен С У басºарылады.
К¼лденең берiлiстiң к¾шiн Г ¼лшеу ¾шiн к¾ш датчигi ²Д, сол моменттегi детальдың ¸дiптеу шамасын ¼лшеу ¾шiн - ¸дiптеу датчигi °Д, ж¸не ажарлау д¼ңгелегiнiң диаметрiн ¼лшеуге - ажарлау д¼ңгелегiнiң диаметрi датчигi ДД ШК ºолданылады .
Ж¾йенiң реттелгiш шамасы к¼лденең берiлiс к½шiн реттеу екi шаманың функциясында - ¸дептiң сол моменттегi шамасы ж¸не ажарлау д¼ңгелегiнiң салыстырмалы ¼згеруi бойынша, адаптивтi басºару º½рылымымен iске асады УАУ.
К¸дiмгi , жай ажарлау станогiмен салыстыр¹анда , адаптивтi басºарылатын станокта ¼нiмдiлiк 30 - ке ¼седi.
7-35 сурет. Адаптивтi ЭЖ структуралыº с¾бесi.
7-36 сурет. Терiñ êåði байланысты БТ-² ж¾йесiíi» субесi.
7-35 сурет 7-36 сурет
Жылдамдыº |
Моментер |
²îç¹àëûñ òåңäåói |
Óäåó |
²оз¹алыс сипаты |
|
+М -Мс
|
М-Мс=0 |
|
Ж¾кетыныштыºта ж¾к iлiнген |
|
+М -М с
|
М-Мс=J |
|
¶денелi катерiнiң басталуы |
|
+М -Мс
|
М-Мс=J |
|
¶денелi тонендеудiң басталуы |
|
-М -Мс |
-М-Мс=J |
|
¶денелi тонендеудiң басталуы |
|
+М(ºîç¹) -Мс(òåæ)
|
М-Мс=0 |
|
Т½ракты жылдамдыпен котеру |
|
+М(ºîç¹) -Мс(òåæ)
|
М-Мс=J |
|
¶денелi котеру |
|
+М(ºîç¹) -Мс(òåæ)
|
М-Мс=J |
|
²îç¹àëòºûøòûº ºоз¹а¾шыоз болуы салдарышаº котерiлу Жеке жа¹дайда М=0 |
|
+М(òåæ) -Мс(Òåæ) |
-М-Мс=J |
|
²оз¹алтºыштыº тежеушi моментi сандарынан жазу котерiлу |
|
+М(Òåæ) -Мс(ºîç¹)
|
М-Мс=0 |
|
Т½раºты жылдамдыºты томендеу |
|
+М(Òåæ) -Мс(ºîç¹)
|
М-Мс=J |
|
²îç¹àëòºûøòûº теже¾шi моментi жерiнен болу томендеу |
|
+М(Òåæ) -Мс(ºîç¹)
|
М-Мс=J |
|
²оз¹алºыштыº тежеушi моментiнiң аз болуы сандарымен ¾демiлi томендеу жеке жа¹дайда М=0 |
|
-М(ºîç¹) -Мс(ºîç¹) |
-М-Мс=J |
|
²оз¹алтºыштыº ºоз¹аушы моментi ¾денелi томендеу |
кесте
УШ - ТАРАУ