

19. Методи вимірювання кутових координат Измерение угловых координат (азимут, угол места):
а) Структурная схема измерителя угловых координат по максимальной амплитуде отраженного сигнала и фазе (в радионавигации) приведена на рис. 11.3.
Точность измерения угловых координат составляет 0,5 , где - ширина диаграммы направленности антенны.
Параболическая антенна РЛС координатного типа имеет узкую диаграмму направленности ( ≈1), следовательно точность изменения угловых координат составляет 0,5.
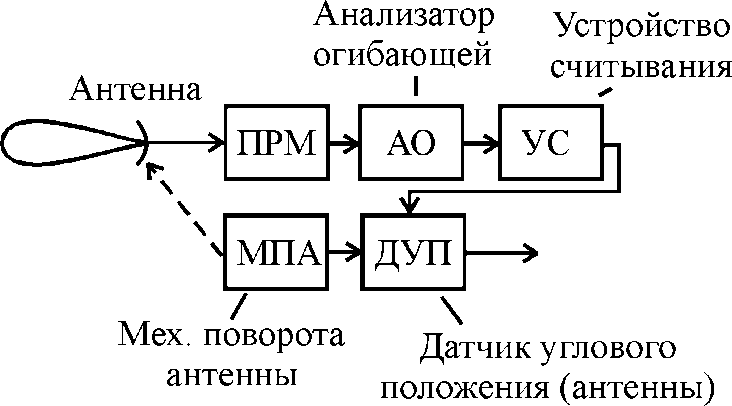
Рис. 11.3. Структурная схема амплитудного измерения угловых координат
б) Для увеличения точности используют метод сравнения в следящей системе (рис.11.4).
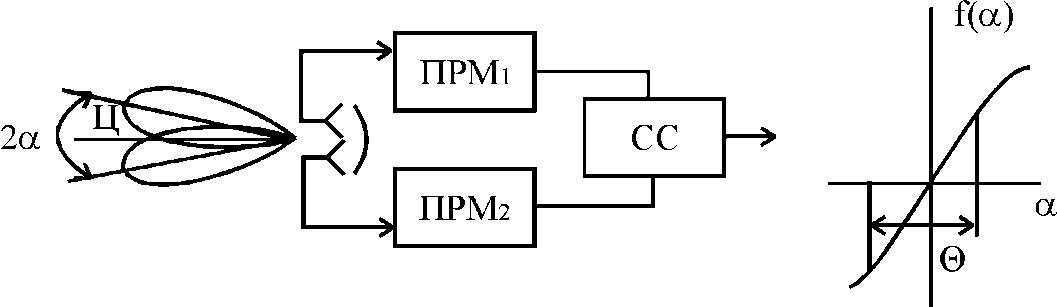
Рис. 11.4. Структурная схема следящей системы измерения угловых координат и её дискриминантная характеристика
в) Цифровой бинарный программный обнаружитель работает по схеме, приведенной на рис. 11.5.
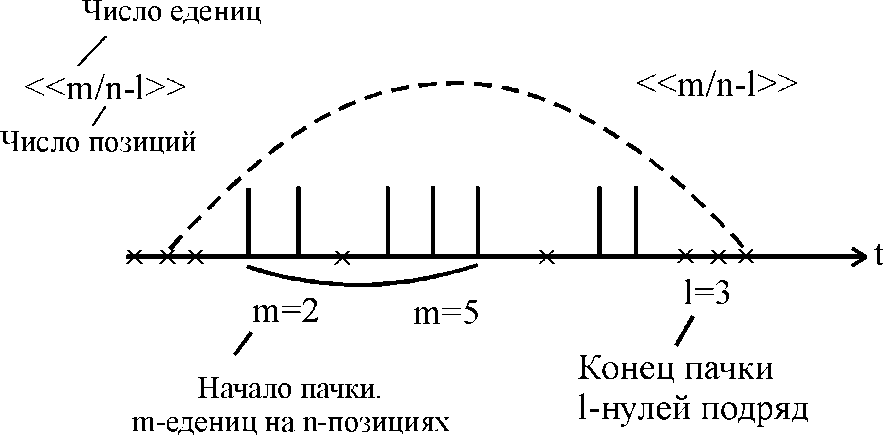
Рис. 11.5. Схема регистрации начала и конца пачки импульсов для точного измерения угловых координат
21. Радіовимірювання дальності імпульсним методом
Наиболее
употребительный амплитудный импульсный
метод по времени запаздывания отраженного
з:
 .
.
Этот метод широко используется в импульсных РЛС. Для увеличения точности определения дальности по времени прихода фронта импульса применяют схему, приведенную на рис. 11.6. Достоинство схемы заключается в том, что на выходе получают сигнал в цифровой форме.

Рис. 11.6. Схема определения дальности подсчетом импульсов.
21. Радіовимірювання дальності частотним методом Частотный метод Обычно этот метод применяют в радиовысотомерах малых высот и в радиодальномерах для измерения расстояний до близких целей.
Частотный метод определения дальности заключается в линейном изменении частоты зондирующего сигнала во времени и в выделении разности частот передачи и приема.
Обычно используется пилообразный линейно частотно модулированный (ЧМ) зондирующий сигнал, приведенный на рис. 11.7. Изменение частоты на выходе передатчика имеет следующий вид:
 ,
,
 ,
k=1,2,…
,
k=1,2,…
Частота на входе приемника отличается частоты генератора на величину пропорциональную времени запаздывания сигнала.

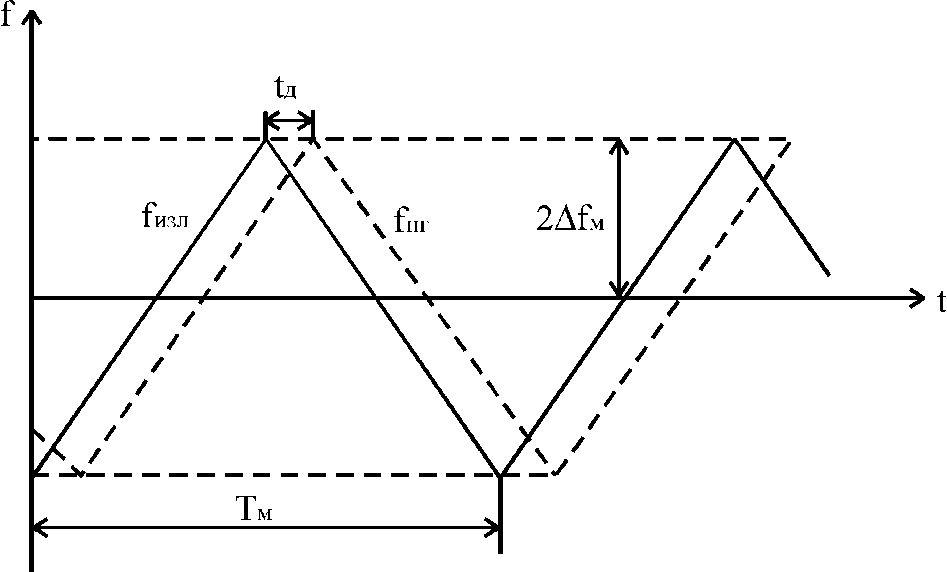
Рис. 11.7. Схема определения дальности частотным методом.
Разностная частота (частота биений), выделяемая супергетеродинным приемником, будет следующей:
 .
.
По разностной частоте (частоте биений) при 0<<TM легко определить дальность:
 .
.
Структурная схема устройства для определения дальности частотным методом приведена на рис. 11.8. По такой схеме работают радиовысотомеры, используемые практически на всех летательных аппаратах (самолетах и вертолетах). Схема отличается простотой, хорошей помехоустойчивостью, энергоэкономична. Передача и прием ведутся через две дипольные антенны с широкой диаграммой направленности. Это позволяет «видеть» минимальное расстояние не только по вертикали (вниз), но и до склонов гор (вбок).
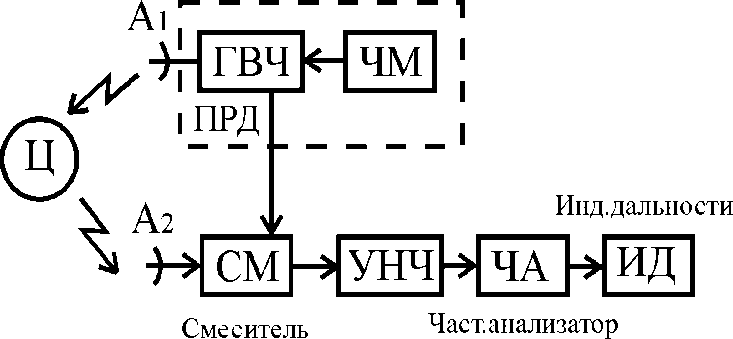
Рис. 11.8. Структурная схема устройства определения дальности частотным методом (А- антенны, Ц - цель, ГВЧ -генератор ВЧ, ЧМ- частотный модулятор, СМ - смеситель, УНЧ - широкополосный усилитель низкой частоты, ЧА - частотный анализатор, индикатор дальности)