

Лабораторна робота 10 Корекція. Пі–регулятор. Пд-регулятор
Мета роботи: навчитись виконувати процедуру синтезу ПІ- та ПД-регуляторів, визначати запаси стійкості системи, будувати її частотні характеристики.
Основнi теоретичнi відомості
Передавальна функція ПІ-регулятора має вигляд
![]() ,
,
де Кр –коефіцієнт пропорційної частини, а Кі- інтегральної відповідно.
Діаграму Боде для такого регулятора зображено на рис.10.1. З рис.10.1 видно, що цей регулятор є регулятором з відставанням по фазі.
Процедура синтезу ПІ-регулятора зводиться до наступного:
1. Коефіцієнт підсилення системи з передавальною
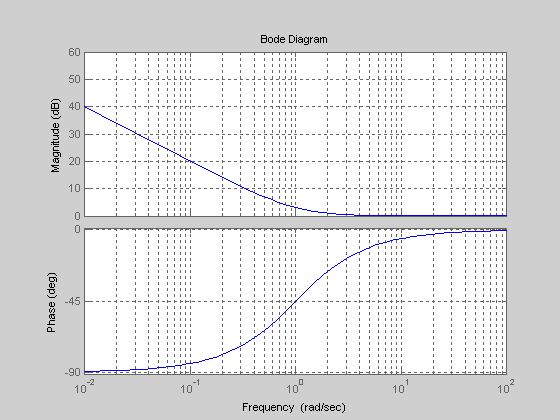
Рис .10.1. Діаграма Боде ПІ-регулятора
функцією
![]() змінити в Кс
раз, для того щоб задовольнити вимоги
до системи в області низьких частот.
змінити в Кс
раз, для того щоб задовольнити вимоги
до системи в області низьких частот.
Знайти частоту 1, при якій
![]()
Визначити коефіцієнт Кр із виразу
![]()
Визначити абсолютне значення нуля передавальної функції
![]()
а
потім
![]()
Далі передавальна функція регулятора буде мати вигляд
![]()
Ця процедура синтезу ПІ-регулятора ілюструється прикладом 10.1.
Приклад 10.1. Необхідно синтезувати пропорційно-інтегральний регулятор для системи, яка зображена на рис.9.1.
Передавальна функція некоректованої системи має вигляд:
, причому
Для некоректованої системи запас по фазі дорівнює 12, а запас по модулю – 3,5 дБ.
В пакеті MATLAB ці значення можна отримати за допомогою оператора margin. Ці значення є досить малими для системи.
Допустимо, що підсилення в області низьких частот задовольняє вимогам до системи, тому будемо рахувати, що Кс=1.
Припустимо,
що запас по фазі повинен бути 50.
Це означає, що при деякій частоті ,
на якій
![]() ,
повинна виконуватись умова
.
,
повинна виконуватись умова
.
Побудувавши
діаграму Боде (див. рис.9.3), можна визначити
що дана умова буде виконуватись на
частоті
![]() .
.
Так
як модуль частотної функції розімкненої
системи на цій частоті приблизно
дорівнює 4,55.Відповідно до пункту 3
процедури синтезу
![]() .
.
Відповідно
до пункту 4 процедури синтезу
![]() та
та
![]() .
.
Тоді передавальна функція регулятора має вигляд
![]()
Передавальна функція ПД-регулятора має вигляд
![]() ,
,
де Кр –коефіцієнт пропорційної частини, а КD- диференційної відповідно. Діаграму Боде для такого регулятора зображено на рис.10.2. З рис.10.2 видно, що цей регулятор є регулятором з попередженням по фазі.
Процедура аналітичного синтезу ПД-регулятора зводиться до наступного:
1.
Для синтезу ПД-регулятора необхідно
спочатку задати початкові дані: запас
по фазі
![]() ,
коефіцієнт підсилення регулятора а0,,
та час встановлення перехідної
характеристики
,
коефіцієнт підсилення регулятора а0,,
та час встановлення перехідної
характеристики
![]() .
.
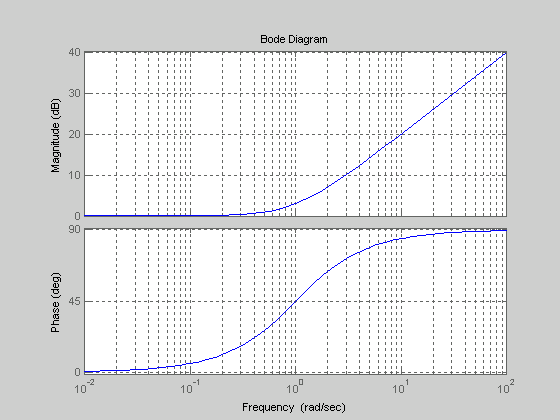
Рис. 10.2. Діаграма Боде ПД-регулятора
2. Обчислити частоту 1, при якій
![]() за формулою
за формулою
![]()
3. Обчислити фазовий здвиг регулятора на частоті 1
![]()
![]()
4. Передавальна функція регулятора буде мати вигляд
![]()
де
![]() ,
,![]() .
.
Обов’язково повинні виконуватись такі умови:
1.
![]()
2.
![]()
3.
сos![]()
Ця процедура синтезу ПД-регулятора ілюструється прикладом 10.2.
Приклад 10.2. Необхідно синтезувати пропорційно-диференційний регулятор для системи, яка зображена на рис.9.1. Передавальна функція некоректованої системи має вигляд:
, причому
Для
синтезу ПД-регулятора необхідно спочатку
задати початкові дані: запас по фазі
![]() ,
коефіцієнт підсилення регулятора а0=1
та час встановлення перехідної
характеристики
=4с.
,
коефіцієнт підсилення регулятора а0=1
та час встановлення перехідної
характеристики
=4с.
Подальші обчислення можна виконати в пакеті програм MATLAB:
1. Вводимо передавальну функцію та початкові значення:
Gp=tf([4],[1 3 2 0]); ph=50; a0=1; Ts=4;
w1=8/(Ts*tan(ph/57.296))
2. Відповідно до п.2 процедури синтезу вибираємо w1=1.7
3.
Обчислимо значення
модуля![]() на частоті 1.
Для цього використовуються оператори
evalfr
– обчислює значення комплексного
коефіцієнта передачі для одного заданого
комплексного значення частоти та abs
- обчислює
абсолютне значення.
на частоті 1.
Для цього використовуються оператори
evalfr
– обчислює значення комплексного
коефіцієнта передачі для одного заданого
комплексного значення частоти та abs
- обчислює
абсолютне значення.
Gpjw1=evalfr(Gp,j*w1)
Gpjw1mag=abs(Gpjw1)
4. Обчислимо фазовий здвиг регулятора на частоті 1. Для цього використовуються оператор angle – обчислює значення кута при заданому значенні частоти
theta=-pi+ph/57.296-angle(Gpjw1)
5. Пункт 3 та 4 можна також виконати за допомогою відомих з попередніх робіт операторів :
[Gpjw1mag, PHASE] = BODE(Gp,1.7)
theta=-pi+ph/57.296- PHASE/57.296
6. Обчислимо значення коефіцієнтів а1 та b1:
a1=(1-a0*Gpjw1mag*cos(theta))/(w1*Gpjw1mag*sin(theta))
b1=(cos(theta)-a0*Gpjw1mag)/(w1*sin(theta))
7. Отримаємо передавальну функцію ПД- регулятора
Gc=tf([a1/b1 a0/b1],[1 1/b1])
8. Порахуємо передавальну функцію системи, яка замкнена зворотнім від’ємним одиничним зв’язком:
T=minreal(Gc*Gp/(1+Gc*Gp))
9. Щоб перевірити стійкість системи обчислимо полюси замкненої системи та запаси її стійкості:
pole(T); margin(Gc*Gp)
Щоб зробити висновки про отримані результати, необхідно побудувати перехідні характеристики отриманих замкнених систем з ПІ-регулятором та ПД-регулятором. Це можна зробити за допомогою оператора step: t=0:0.2:20; step(Т1,Т,t)
Завдання
Необхідно синтезувати пропорційно-інтегральний та пропорційно-диференційний регулятори для системи, яка зображена на рис.9.1. Передавальна функція некоректованої системи має вигляд:
![]() ,
причому
,
причому
![]() Для
цього необхідно:
Для
цього необхідно:
1. Визначити запас стійкості заданої системи.
2. По заданому алгоритму синтезувати ПІ-регулятор.
3. Визначити запас стійкості коректованої системи.
4. Побудувати її перехідну характеристику.
5. По заданому алгоритму синтезувати ПД-регулятор.
6. Визначити запас стійкості коректованої системи.
7. Побудувати її перехідну характеристику.