

2. Магнитное поле Земли и его характеристика. Понятие магнитного склонения.
Магнитное поле земли наблюдается на ее поверхности, в недрах и под водой.
Магн.поле – особая форма материи – создается упорядоченным движением электронов.
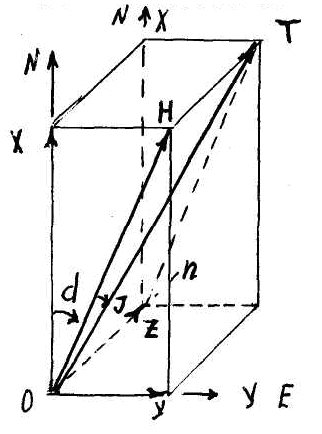
Магнитное поле Земли характеризуется следующими основными элементами: полным вектором напряженности (или индукции) Т; горизонтальной H и вертикальной Z составляющими полного вектора; магнитным наклонением J; магнитным склонением d. Величины Т, H, Z характеризуют магнитную индукцию и выражаются в теслах.
Свободно подвешенная магнитная стрелка показывает направление вектора Т в рассматриваемой точке магнитного поля Земли. Угол магнитного наклонения J лежит в вертикальной плоскости и измеряется от горизонтальной линии (магнитного меридиана) до вектора Т. Магнитное склонение d — это горизонтальный угол между географическим и магнитным меридианами. Элементы земного магнетизма связаны следующими соотношениями:
H=T·cosJ;
Z=T·sinJ;
 ;
;
Т2=Н2·Z2; х=Н·cosd; y=H·sind
Магнитное склонение указывается на навигационных картах и учитывается как часть общей поправки магнитного компаса.
Магнитное поле земли постоянно изменяется, поэтому d – склонение – на карте привязано к определенному году и на ней указывается годичное изменение склонения.
Билет №4
1.Спутниковые рнс: источники погрешностей, пути повышения точности срнс.
РНС это радиотехнический комплекс включающий в себя систему береговых или космических синхронизированных излучателей и бортовых приёмоиндикаторов.
Источники погрешностей:
Координатная – (связана с математической моделью земной поверхности (ПЗ-90, WGS-94). -Зависят от нестабильности генераторов спутников; -От способов измерения параметров орбиты спутников, их обработки, прогнозирования и закладки.)
Временная – (каждый спутник имеет своё время его каждый раз приводят к стандарту. Страны стремятся к тому, чтобы время на спутниках было одинаково.)
Потребителя – (нестабильность питания, - алгоритм обработки,- количество используемых спутников, и.т.п)
Повышение точности навигационных определений до предельно малых значений. Эта проблема решается прежде всего использованием дифференциальных и относительных методов навигации, в значительной степени обеспечивающих компенсацию общих для всех потребителей систематических ошибок. Основное направление повышения точности связано с использованием, наряду с информацией принимаемого сигнала, фазовой информации. При этом главная возникающая трудность состоит в разрешении неоднозначности измерений.
2.Магнитное поле судна. Уравнение Пуассона, сущность входящих составляющих.
Корпус современного судна изготовлен из спец.сталей, а также его машины и механизмы. Разные сорта сталей намагничиваются по разному, поэтому в целом судно обладает свойствами как магнитотвердого так и магнитомягкого железа.
Мягкое железо в магнитном поле Земли приобретает индуктивный (временный) магнетизм. При изменении курса судна элементы из мягкого ферромагнитного материала перемагничиваются, а при отсутствии внешнего (намагничивающего) поля теряют свои остаточный магнетизм. Твердое железо имеет постоянную намагниченность, которая возникает в процессе постройки судна под влиянием сильных намагничивающих полей. Постоянный магнетизм в дальнейшем не зависит от курса судна и стабильно сохраняется в течение длительного времени.
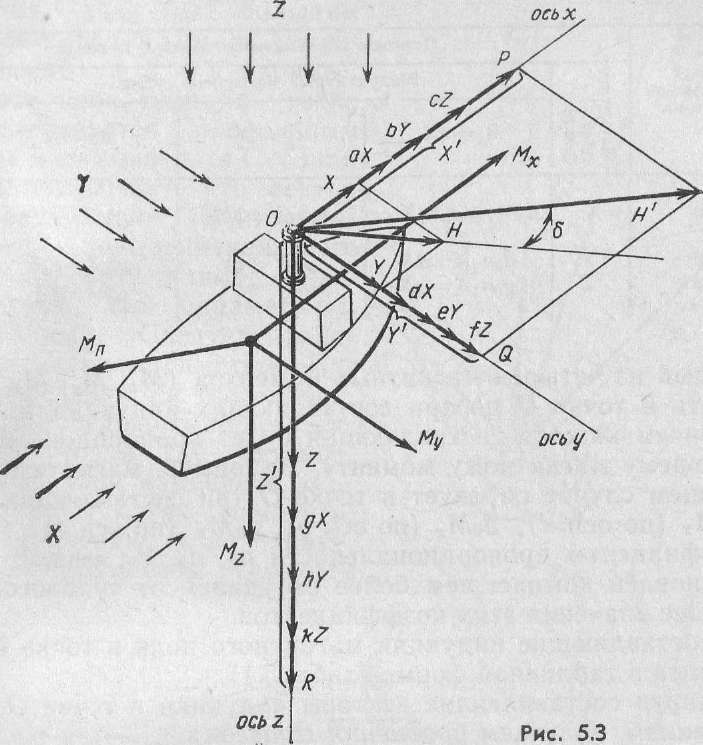
Полный вектор индукции земного поля можно представить в виде трех составляющих: X (продольной), У (поперечной), Z (вертикальной). Продольная X и поперечная Y составляющие при геометрическом сложении образуют горизонтальную составляющую Н. Вектор индукции Н определяет направление магнитного меридиана, от которого отсчитывается магнитный курс k судна.
Необходимо поместить судно в магнитное поле земли.
Поле X намагничивает все продольные элементы судна. Суммарная продольная намагниченность судна характеризуется магнитным моментом Мх = п1Х, пропорциональным индукции намагничивающего поля X. Аналогично поперечное поле Y создает поперечную намагниченность — магнитный момент My = n2Y, а поле Z — вертикальный магнитный момент Mz=n3Z. В этих выражениях n1 п2 и п3 — коэффициенты пропорциональности, зависящие от размеров и формы элементов судна, а также от магнитной восприимчивости мягкого судового железа.
Помимо трех векторов Мх, Му и Мz, характеризующих индуктивное намагничивание, можно также представить вектор Мп — магнитный момент, характеризующий постоянный магнетизм твердого судового железа. Направление вектора Мn в общем случае не совпадает ни с одной из осей (х, у, z). Вектор Мn не зависит ни от курса судна, ни от магнитной широты.
Каждым из четырех магнитных моментов (Мх, Му, Мz, Мn)имеет по три составляющих индукции магнитного поля, причем каждая составляющая будет пропорциональна соответствующему магнитному моменту. Например, магнитный момент Мх в общем случае образует три составляющих индукции: а0Мх (по оси х), d0Mx (по оси у), goMx (по оси z).
Коэффициенты пропорциональности а0, d0, g0 зависят от того, где установлен компас: чем более он удален от судового железа, тем меньше значения этих коэффициентов.
Суммируя составляющие векторы индукции по трем направлениям, получаем уравнения Пуассона.
X΄=X+aX+bY+cZ+P
Y΄=Y+dX+lY+fZ +Q
Z΄=Z=gX+hY+kZ+R
Слагаемые P,Q,R – выражают проекции напряженности магнитного поля постоянного судового магнетизма (от твердого железа).
Билет №5