

Запаздывание как свойство ор. Время запаздывания
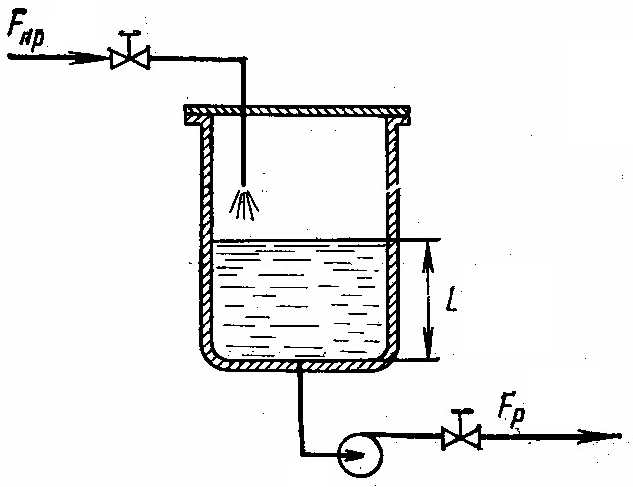
Запаздывание объекта выражается в том, что его выходная величина начинает изменяться не сразу после нанесения возмущения, а только через некоторый промежуток времени τ, называемый временем запаздывания. Все реальные объекты обладают запаздыванием, так как изменение потоков вещества или тепла распространяется в объектах с конечной скоростью и требуется время для прохождения сигнала от места, где фиксируется изменение выходной величины. Обозначив это расстояние через l, а скорость прохождения сигнала через s, выразим время запаздывания следующим образом:
τ = l / s.
У равнения динамики и динамические характеристики устойчивых и нейтральных объектов с запаздыванием
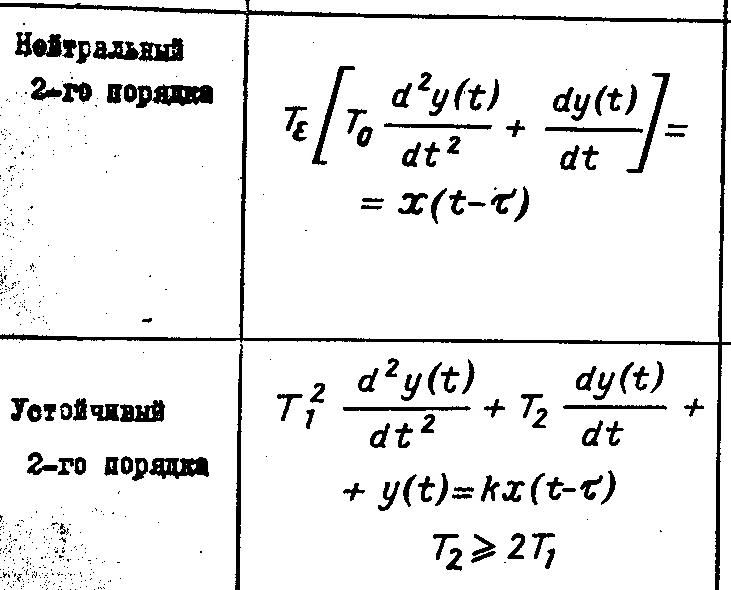
Уравнения динамики и динамические характеристики объектов регулирования 1-го и 2-го порядка
В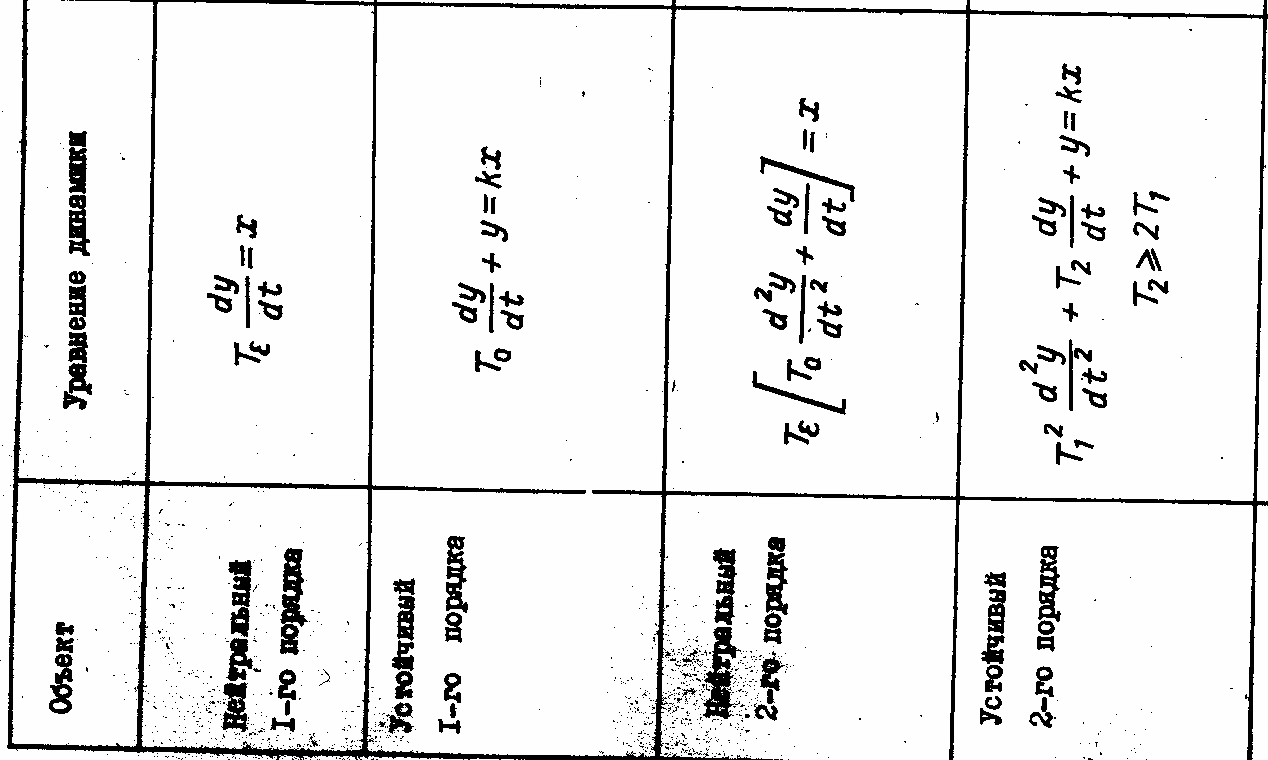 зависимости от вида дифференциального
уравнения динамики реального объекта
химической технологии целесообразно
различать объекты первого, второго и
высокого порядков.
зависимости от вида дифференциального
уравнения динамики реального объекта
химической технологии целесообразно
различать объекты первого, второго и
высокого порядков.
Связь между структурой уравнения динамики объекта и его свойствами. Пример
Поведение большинства объектов химической технологии по конкретному каналу, например каналу x-y, может быть аппроксимировано уравнением динамики вида
Т∙(dy(t) / dt) + y(t) = k∙x∙(t-τ).
Наличие слагаемого «+ у» в левой части уравнения свидетельствует о том, что в объекте имеется внутренняя отрицательная обратная связь, он устойчив и обладает положительным самовыравниванием, величина которого обратна коэффициенту усиления. Отсутствие такого слагаемого указывает на отсутствие в объекте обратной связи; такой объект нейтрален. Если слагаемое «у» имеет отрицательный знак, то в объекте существет внутренняя положительная обратная связь и он неустойчив.
Количество емкостей в объекте определяется порядком старшей производной. В нашем случае объект имеет одну емкость, величина которой определяется отношением Т/k.
Запаздывание определяют по наличию времени запаздывания τ в аргументе слагаемого правой части уравнения.
Таким образом, рассматриваемый объект по каналу x-y является устойчивым одноемкостным объектом с запаздыванием.
Аналитическое определение свойств ор
Аналитический метод заключается в составлении математического описания объекта, при котором находят уравнения статики и динамики на основе теоретического анализа физических и химических процессов, протекающих в исследуемом объекте, и с учетом конструкции аппаратуры и характеристик перерабатываемых веществ. При выводе этих уравнений используются фундаментальные законы сохранения веществ и энергии, а также кинетические закономерности процессов химических превращений, переноса тепла и массы.
Аналитический метод применяют при проектировании новых технологических объектов, физико-химические процессы которых достаточно хорошо изучены. Он позволяет прогнозировать работу объектов в статическом и динамическом режимах, однако сопряжен с трудностью решения и анализа составленных уравнений и требует проведения специальных исследований для определения численных значений коэффициентов этих уравнений. Кроме того, точность математического описания реальных объектов в большой степени зависит от введения упрощающих допущений.