

Характеристика отдельных элементов
Схемы АСР содержат узлы разветвления, узлы суммирования и динамические звенья (рис.I-10).
Узел разветвления. В таком узле входной сигнал xвх разделяется, не меняя своего значения, и направляется далее по нескольким каналам
xвых1 = xвых2 = … = xвыхn = xвх
где xвых1, xвых2 …, xвыхn – сигналы в выходных каналах узла разветвления.
Суммирующий узел, к которому подходит несколько сигналов xвх1, xвх2 …, xвхn, формирует на выходе только один сигнал xвых, равный алгебраической сумме входных сигналов
xвых = xвх1 + xвх2 + …+ xвхn
Динамическое звено. Проходя такое звено, входной сигнал xвх изменяет сигнал на выходе xвых по форме и величине (в некоторых случаях только по величине).
В основу классификации звеньев положены соответствующие уравнения динамики. Переходные процессы систем регулирования (пневматических, электрических, механических и др.), имеющих разную физическую природу и различное конструктивное оформление, но обладающих одинаковыми динамическими свойствами, подобны. Поэтому каждая такая система описывается одним или несколькими одинаковыми звеньями.
Большинство звеньев обладает направленностью действия (детектирующее свойство). Сигнал проходит через них только в одном направлении – с входа звена на его выход, в обратном направлении звено сигнал не пропускает. Например, изменение температуры рабочего спая термоэлектрического преобразователя приводит к изменению термоэлектродвижущей силы на его свободных концах.
Звенья систем могут быть статическими и астатическими. У статического звена при постоянном входном воздействии выходная величина со временем устанавливается на постоянном значении, отличном от первоначального, а у астатического звена в установившемся режиме выходная величина непрерывно изменяется с постоянной скоростью или ускорением.
Динамические звенья называют типовыми, если изменение проходящего через них сигнала описывается алгебраическим или дифференциальным уравнением не выше 2-го порядка. Они имеют одну входную и одну выходную величину. Типовыми звеньями являются: усилительное, интегрирующее, дифференцирующее, апериодическое, колебательное и запаздывающее.
С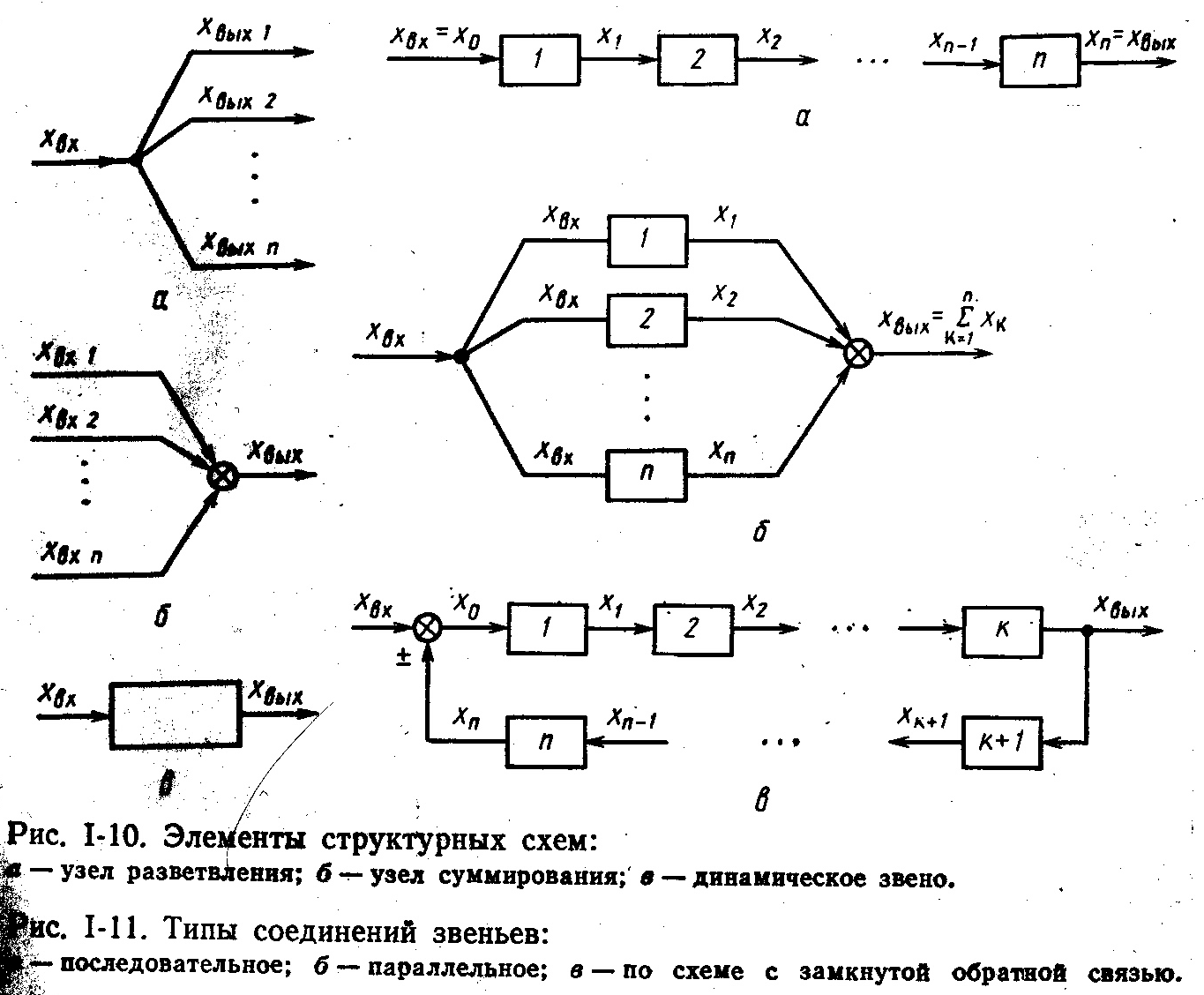 оединения
звеньев. В
реальных системах звенья объединяют
последовательно, параллельно, а также
в соединения с замкнутой обратной связью
(рис.I-11).
оединения
звеньев. В
реальных системах звенья объединяют
последовательно, параллельно, а также
в соединения с замкнутой обратной связью
(рис.I-11).
При последовательном соединении звеньев (рис.I-11, а) выходная величина предыдущего звена без искажения поступает на вход последующего звена. При таком соединении звеньев входной величиной является входная величина первого по ходу сигнала звена, а выходной – выходная величина последнего из них.
При параллельном соединении звеньев (рис.I-11, б) входной сигнал через узел разветвления поступает на входы всех элементарных звеньев. Выходные сигналы этих звеньев суммируются и направляются на выход соединения.
При замкнутой обратной связи (рис.I-11, в) система состоит из двух цепочек звеньев, каждая из которых может представлять собой достаточно сложное соединение. По одной из этих цепочек сигнал проходит последовательно через звенья от входа соединения к его выходу, т.е. по прямой связи, а по другой – от выхода соединения к входу, т.е. по обратной связи. При этом на вход первой цепочки звеньев подается сигнал x0, равный сумме входной величины соединения xвх и выходной величины второй цепочки звеньев xn
x0 = xвх + xn
Выходной величиной такого соединения xвых является выход k-го звена; одновременно этот же сигнал подается на вход (k + 1)-го звена.
Если сигнал с выхода обратной связи и основной входной сигнал соединения действуют в одном направлении, то обратная связь называется положительной, а если эти сигналы действуют в противоположных направлениях – отрицательной.