

Составление уравнения динамики и нахождение переходной характеристики аср, состоящей из устойчивого объекта регулирования 1-го порядка без запаздывания и п-регулятора
Выводы:
В системе с П-регулятором всегда есть статическая ошибка регулирования,
В системах с П-регулятором скорость изменения выходной величины в начальный момент времени такая же, как и в ОР,
П-регулятор всегда приводит систему к равновесию.
Составление уравнения динамики и нахождение переходной характеристики аср, состоящей из устойчивого объекта регулирования 1-го порядка без запаздывания и пд-регулятора
Выводы:
В системах с ПД-регулятором всегда есть статическая ошибка регулирования xст,
Скорость изменения выходной величины в начальный момент времени меньше, чем в ОР.
Составление уравнения динамики и нахождение переходной характеристики аср, состоящей из устойчивого объекта регулирования 1-го порядка без запаздывания и пи-регулятора
Главный вывод: В системах с ПИ-регулятором выходная величина всегда приходит к заданному значению.
Статическая ошибка регулирования xст = 0.
Типовые динамические звенья
Динамическое звено – элемент системы регулирования, который имеет одну входную и одну выходную величины и описывается стандартным уравнением динамики.
преобразователя приводит к изменению термоэлекродвижущей силы на его свободных концах.
Динамические звенья называют типовыми, если изменение проходящего через них сигнала описывается алгебраическим или дифференциальным уравнением не выше 2-го порядка. Типовыми звеньями являются: усилительное, интегрирующее, дифференцирующее, апериодическое, колебательное и запаздывающее.
Усилительное звено используют для описания измерительных преобразователей, исполнительных устройств и пропорциональных составляющих закона регулирования.
Интегрирующее звено используют для описания интегральных составляющих закона регулирования, а также – нейтральных объектов 1-го порядка.
Дифференцирующее звено используют для описания Д-составляющих закона регулирования.
Апериодическое звено используют для описания устойчивых объектов 1-го порядка, а также – измерительных преобразователей или исполнительных устройств.
Колебательное звено используют для описания устойчивых объектов второго порядка.
Запаздывающее звено используют для учета явления запаздывания в реальных объектах.
Уравнения динамики, переходные характеристики, передаточные функции звеньев
П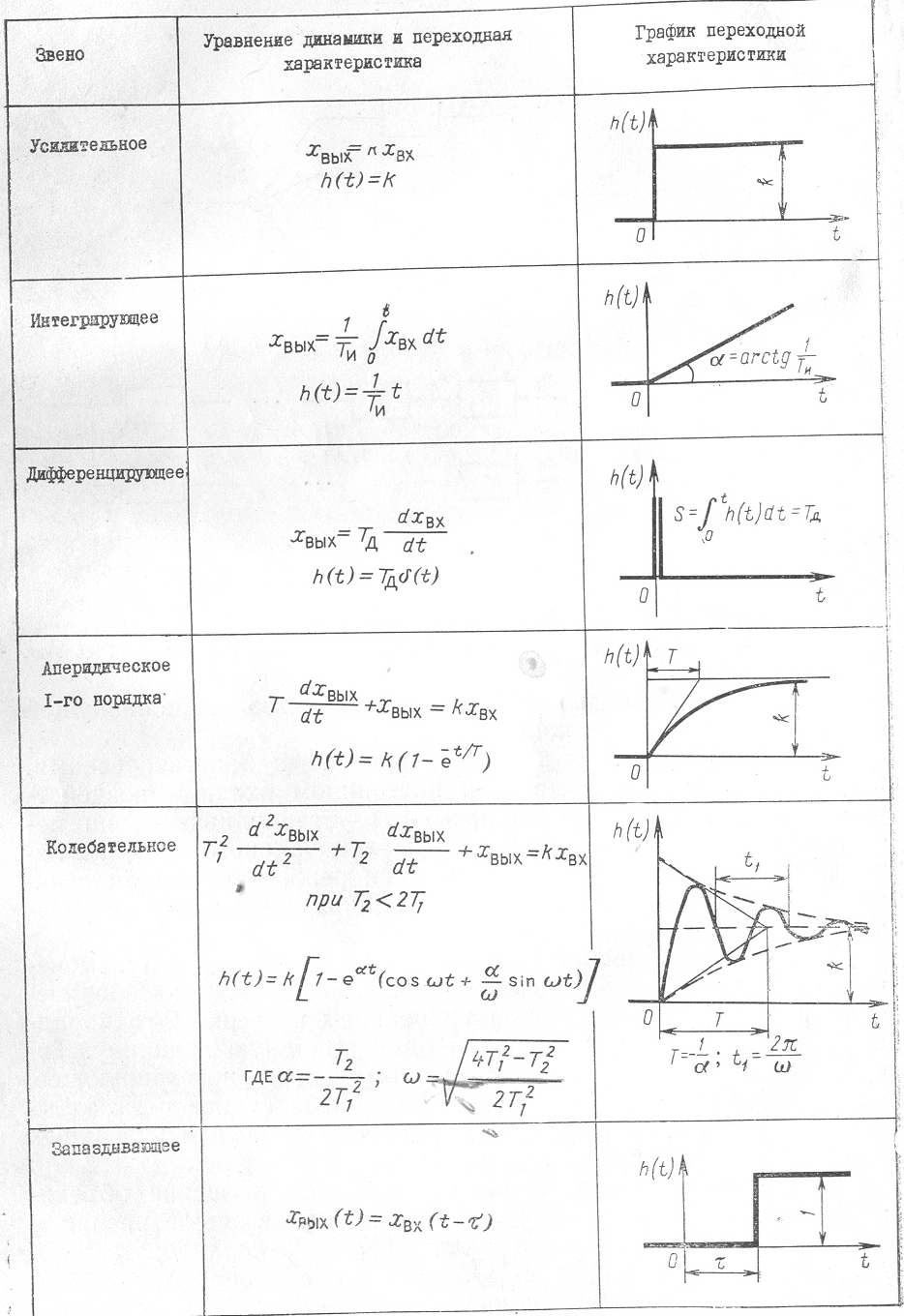 ередаточная
функция
ередаточная
функция
Передаточной функцией называетя отношение преобразованной по Лапласу выходной величины к преобразованной по Лапласу входной величине. При нулевых начальных условиях.
Изображение приборов и средств автоматизации на функциональных схемах.
Функциональная схема – схема, которую составляют перед проектированием систем автоматизации и на которую наносят чувствительные элементы, приборы, регуляторы, вычислительные устройства и другие средства автоматизации, необходимые для оснащения данного процесса.
Изображение приборов и средств автоматизации на схемах производится в соответствии с ГОСТ 21.404-85 «Автоматизация технологических процессов. Обозначения условные приборов и средств автоматизации в схемах». Стандарт устанавливает условные обозначения приборов, средств автоматизации и линий связи, применяемых при выполнении схем автоматизации технологических процессов, разрабатываемых для строительства предприятий, зданий и сооружений всех отраслей промышленности и народного хозяйства.