

Работа пид-регуляторов в замкнутом контуре
В замкнутом контуре ПИД-регулирование приводит к уменьшению скорости dyт/dt и, как следствие этого, к повышению качества регулирования.
Преимущества и недостатки, область применения
К преимуществам можно отнести то, что ПИД-регуляторы позволяют обеспечить более высокий уровень регулирования и их универсальность: используя ПИД-регуляторы, можно получить различные законы регулирования – установив Тд (Тп) = 0, получим ПИ-регулятор, а установив Ти (Тиз) = ∞ и Тд (Тп) = 0, получим П-регулятор.
К недостатку я бы отнес сложность их конструкции.
Такие регуляторы устанавливают на инерционных объектах со значительным запаздыванием, когда недопустимо остаточное отклонение регулируемой величины от заданного значения.
Исполнительные устройства
Исполнительные устройства – устройства, предназначенные для введения управляющего автоматического регулятора на объект регулирования.
Любое исполнительное устройство состоит из
Привода – исполнительного механизма,
Регулирующего органа.
Исполнительные механизмы и регулирующие органы. Их виды
Исполнительный механизм предназначен для перемещения регулирующего органа. Под действием исполнительного механизма меняется площадь проходного сечения регулирующего органа, а следовательно и расход технологического потока.
Обычно исполнительные устройства состоят из пневматического, электрического или гидравлического исполнительного механизма и регулирующего органа. Привод (исполнительный механизм) у
Гидравлических устройств – поршень и цилиндр
Электрических устройств – электродвигатель с редуктором
Пневматических устройств – специальный механизм
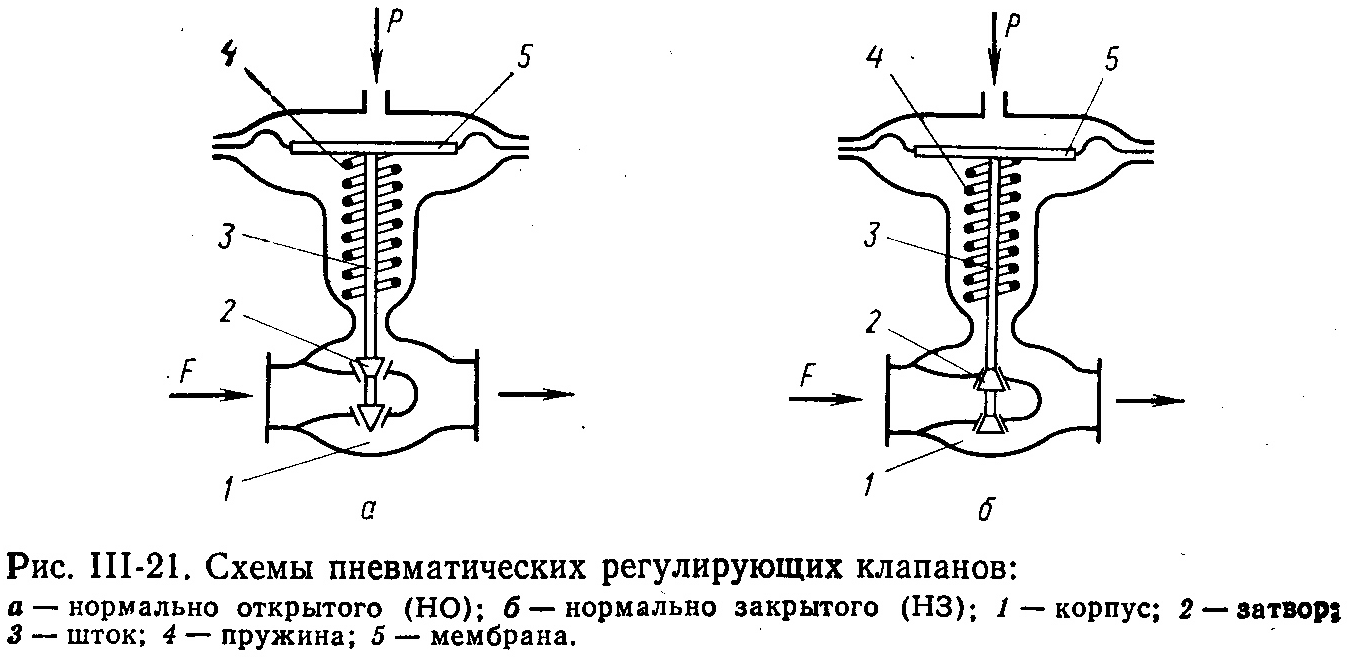
В химической промышленности в автоматических системах часто используют пневматические мембранный и поршневой исполнительные механизмы, а в качестве регулирующих органов – регулирующий клапан и заслонку.
Причины:
Взрыво- и пожаробезопасность,
Способность обеспечения полного открытия или полного закрытия регулирующего органа при аварийном прекращении подачи воздуха.
Пневматический регулирующий клапан, его устройство. Одно- и двуседельные клапаны, их применение. Клапаны типа НО и НЗ и их применение в технологических схемах

Размеров при низких давлениях среды. Двуседельные клапаны имеют почти уравновешенный затвор, поэтому их используют в исполнительных устройствах больших размеров при высоких давлениях среды.
Переходные процессы в системах регулирования
Изменение во времени выходной величины системы от момента нанесения возмущающего или задающего воздействий до прихода ее в равновесное состояние называют переходным процессом.
П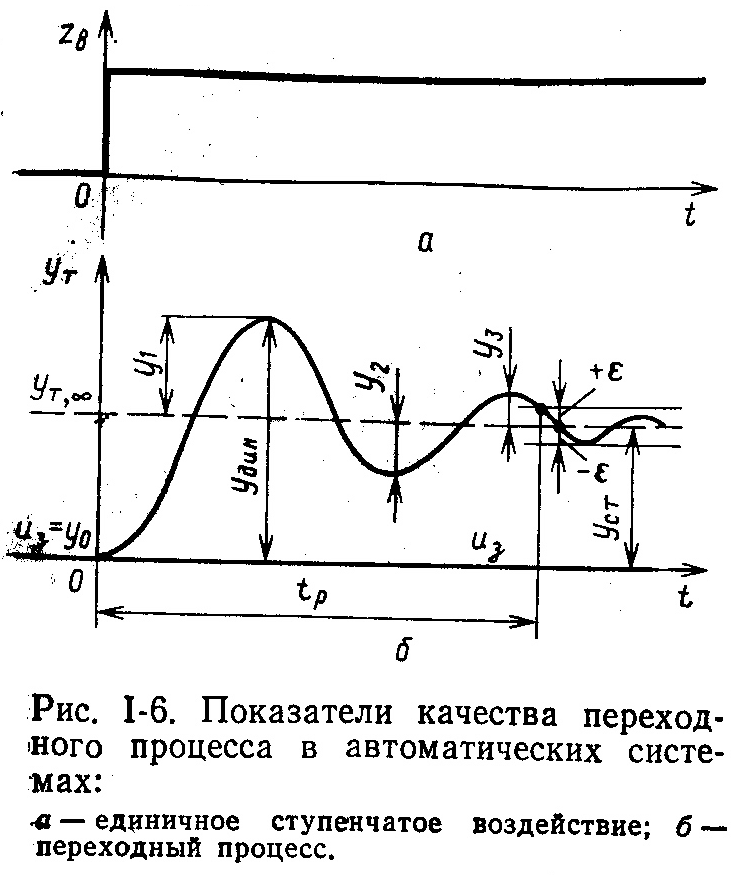
![]()
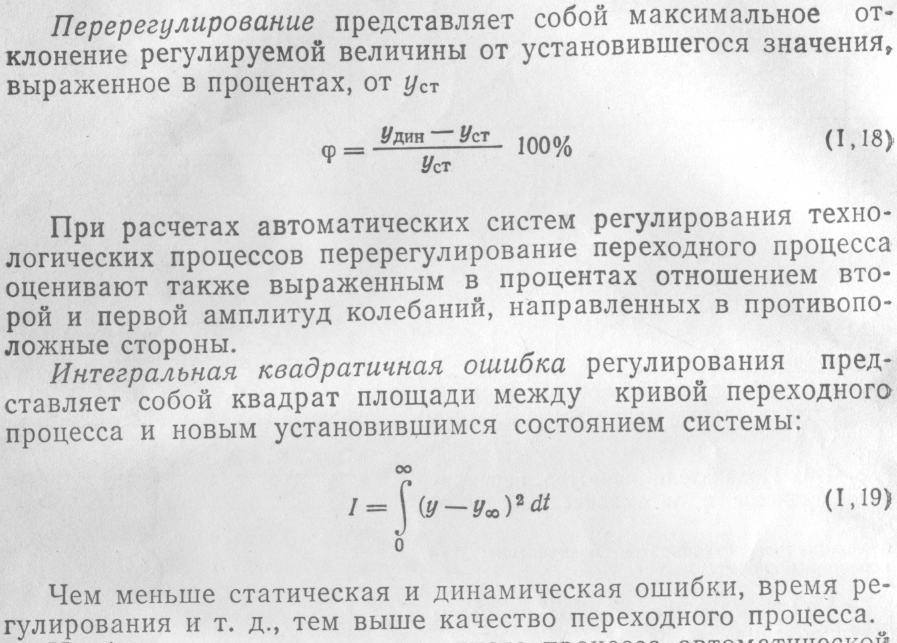
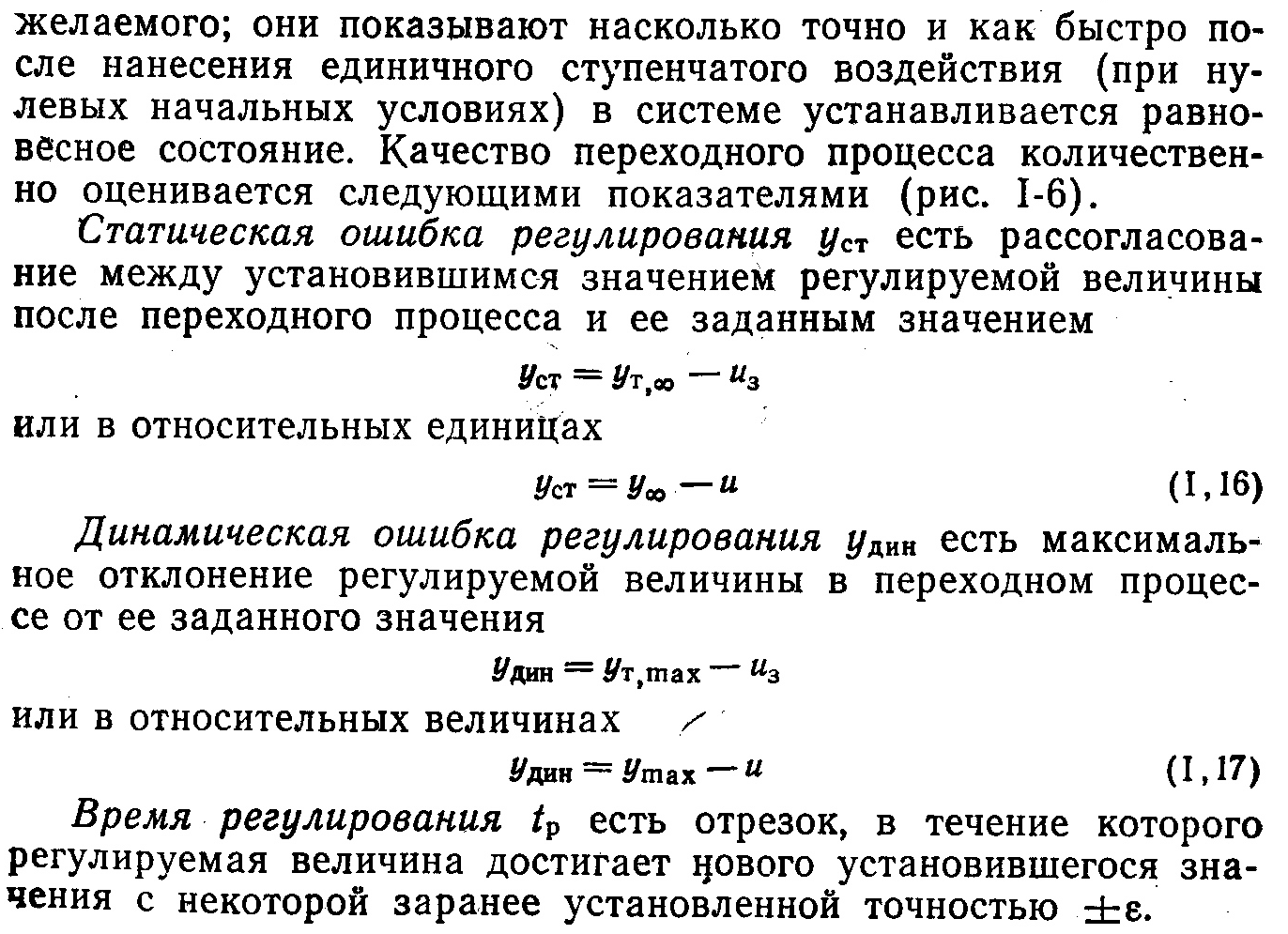 оказатели
качества переходных процессов
оказатели
качества переходных процессов
Т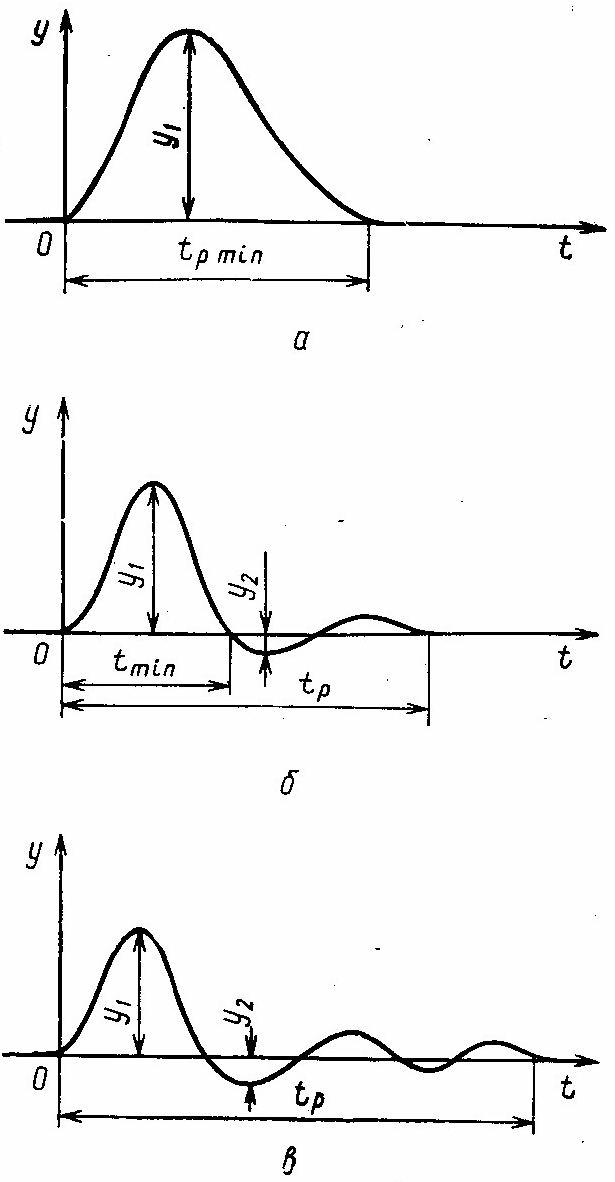 иповые
переходные процессы и их характеристика
иповые
переходные процессы и их характеристика
2
 2. Понятие
о прямой и обратной связи
2. Понятие
о прямой и обратной связи
Прямая связь – информационный канал от входа системы к ее выходу.
Обратная связь – информационный канал от выхода системы к ее входу.
Обратная связь по знаку может быть положительной или отрицательной. Когда обратная связь положительна, сигнал обратной связи складывается с сигналом прямой связи. Когда обратная связь отрицательна, сигнал обратной связи вычитается из сигнала прямой связи.
Главная обратная связь системы регулирования
Система регулирования может иметь несколько обратных связей положительных и/или отрицательных. Обратная связь системы, в которую входит АР, называется главной обратной связью.
Для устойчивости системы регулирования необходимо, чтобы ее главная обратная связь была отрицательной.
Правила формирования отрицательной обратной связи. Примеры
Количество элементов обратного действия должно быть нечетным,
Количество элементов прямого действия может быть любым,
Знак перед возмущающим воздействием и заданием регулятора не влияет на формирование отрицательной обратной связи
Е сли
ВХ↑ и ВЫХ↑ - элемент прямого действия;
ВХ↑ и ВЫХ↓ - элемент обратного действия.
сли
ВХ↑ и ВЫХ↑ - элемент прямого действия;
ВХ↑ и ВЫХ↓ - элемент обратного действия.
(1)
(2)
↓L, ↑Fр – объект регулирования обратного действия,
↑L, ↑Fпр – объект регулирования прямого действия.
АР у (1) должен быть прямого действия, у (2) – обратного.