

3.4. Структурные методы автоматической коррекции погрешностей средств измерительной техники
Выбор той или иной структурной схемы инвариантных СИТ с автоматической коррекцией погрешностей определяется видом измеряемой величины, нужной точностью измерений, простотой аппаратурной реализации и другими факторами. В зависимости от наличия связи выхода со входом СИТ их структурные схемы могут быть разомкнутыми и замкнутыми.
Корректирующее влияние при структурной коррекции погрешностей СИТ может образовываться с помощью или дополнительного измерительного канала (пространственное разделение), или дополнительного цикла измерения (временное разделение).
Как при пространственном, так и при временном разделении каналов корректирующее влияние может вводиться в основной измерительный канал адитивно, мультипликативно и комбинировано. Рассмотрим типичные структурные схемы инвариантных СИТ с пространственным и временным разделением измерительных каналов.
3.4.1. Разомкнутые структурные схемы инвариантных средств измерительной техники
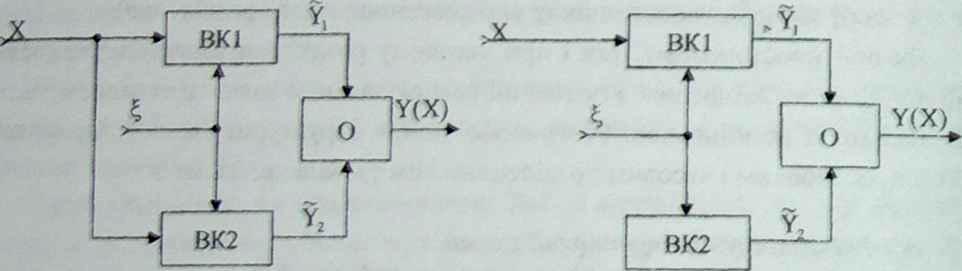
Два варианта обобщенных разомкнутых структурных схем инвариантных СИТ с пространственным разделением каналов приведены на рис.3.4. Они имеют одинаковый состав функциональных блоков - по два измерительных канала (ИК1 и ИК2) и вычислитель (В), но отличаются алгоритмом обработки выходных величин измерительных каналов Y1 и Y2.
В схеме (рис.3.4,а) измеряемая величина X подается на оба канала (ИК1 и ИК2), а в схеме (рис.3.4,б) - на один канал (ИК1). Влияющая величина согласно с принципом инвариантности в обеих схемах поступает на оба измерительных канала. Выходные величины и ИК1 и ИК2 соответственно подаются в вычислитель В, где исключают зависимость выходной величины вычислителя Y(Х) от влияющей величины .
Запишем функции преобразования измерительной информации в обеих схемах СИТ.
Для СИТ со структурной схемой (рис.3.4,а) имеем:
- для величины Y1 на выходе ИК1
= f1(X,);
-для величины на выходе ИК2
= f2(X,);
- для величины Y на выходе вычислителя
Y = f( , ) = Y(Х).
Аналогично для СИТ со структурной схемой (рис.3.4,б) запишем:
= f1(X,);
= f2(X,);
Y = f( , ) = Y(Х).
|
Рис.3.4. Разомкнутые структурные схемы инвариантных СИТ с пространственным разделением каналов, в которых измеряемая величина X направляется: а - на оба измерительных канала (ИК1 и ИК2); б - на один измерительный канал (ИК1) |
Если влияющих величин несколько (1 ,,…), то количество измерительных каналов инвариантного СИТ зависит от измеряемой величины X, количества влияющих величин и связей между каналами. Структурные схемы таких СИТ могут строиться аналогично схемам на рис.3.4, а также как комбинация этих схем.
Разомкнутая схема инвариантного СИТ с временным разделением каналов, или циклическим по времени введением измерительной информации в вычислитель приведена на рис.3.5.
В этой схеме выделен третий измерительный канал ИК3, который объединяет общие элементы схемы СИТ, и введен переключатель S. Измерение выполняется за два цикла: первый цикл - переключатель S в состоянии I, второй цикл - переключатель S в состоянии II. Алгоритм обработки измерительной информации в вычислителе является аналогичным алгоритму для схемы (рис.3.4.б).
|
Рис.3.5. Разомкнутая структурная схема СИТ с временным разделением каналов |

Выделение ИК3 позволяет уменьшить, во-первых, погрешность от неидентичности измерительных каналов ИК1 и ИК2 и, во-вторых, количество элементов в схеме СИТ.
Если влияющая величина имеет только аддитивний характер или только мультипликативний характер, то остается справедливой структурная схема СИТ на рис.3.4,а, но в ней конкретизируется вычислитель В. Так, для исключения аддитивного влияния (аддитивная коррекция) как вычислитель используется разностное устройство(рис.3.6)
|
Рис. 3.6. Разомкнутая структурная схема СИТ с пространственным разделением каналов и аддитивной коррекцией |
Для статического режима измерений согласно формуле (3.1) запишем соотношение для выходных величин и измерительных каналов ИК1 и ИК2:
= k1Х + k1 = k1Х + 1ад ; (3.10)
= k2 = 2ад , (3.11)
где k1, k1 - соответственно коэффициенты передачи измерительного канала ИК1 для измеряемой величины X и влияющей величины ;
1ад = k1; 2ад = k2 - соответственно аддитивные погрешности измерительных каналов ИК1 и ИК2, обусловленные влияющей величиной .
Как видно из уравнений (3.10) и (3.11), СИТ будет инвариантным к влияющей величине при условии 1ад = 2ад или k1 = k2, что отвечает выходной величине разностного устройства
Y(Х) = - = k1Х + 1ад - 2ад = k1Х,
которая действительно не зависит от влияющей величины .
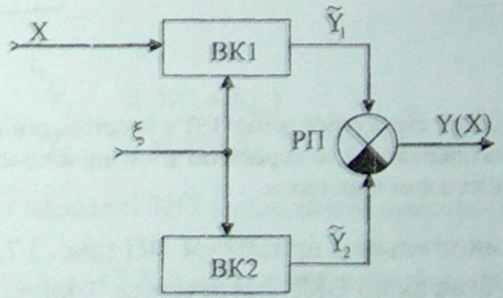
Для исключения мультипликативного влияния (мультипликативная коррекция) как вычислитель может использоваться или множительное устройство (МП), или делительное устройство (ДП) (рис.3.7). В обеих схемах измеряемая величина X поступает на измерительный канал ИК1, а на измерительный канал ИК2 подается образцовая величина Х0. Ее называют калибровочной величиной, а операцию - мультипликативной коррекцией погрешности СИТ.
|
Рис.3.7. Разомкнутые структурные схемы СИТ с пространственным разделением каналов и мультипликативной коррекцией: а - с множительным устройством; б - с делительным устройством |

Схема СИТ с множительным устройством МП (рис.3.7,б) выполняется так, что влияющая величина , на входе ИК2 инвертируется. Тогда для выходных величин и измерительных каналов ИК1 и ИК2, согласно формуле (3.3), имеем:
= k1Х(1 + k1) = k1Х(1 + 1м);
= k2Х0(1 – k2) = k2Х0(1 - 2м),
где k1, k2 - номинальные коэффициенты передачи измерительных каналов ИК1 и ИК2 по измеряемой величине X;
k1, k2 - коэффициенты передачи измерительных каналов ИК1 и ИК2 по влияющей величине ;
1м = k1, 2м = k2 - относительные мультипликативные погрешности измерительных каналов ИК1 и ИК2 соответственно.
Выходная величина Y(Х) на выходе множительного устройства равняется
Y(Х) = = k1k2Х0Х(1 + 1м)(1 - 2м),
или, пренебрегая величиной второго порядка малости 1м, 2м получим
Y(Х) = k1k2Х0Х(1 + 1м - 2м),
При условии равенства относительных мультипликативных погрешностей 1м = 2м, или коэффициентов передачи влияющей величины k1 = k2 , это выражение принимает вид
Y(Х) = k1k2Х0Х = kХ,
где k = k1k2Х0 - коэффициент передачи СИТ с множительным устройством. Как видно из формулы (3.12), выходная величина Y(Х) СИТ с множительным устройством не зависит от мультипликативной влияющей величины .
Схема СИТ с делительным устройством ДП (рис.3.7,б) выполняется так, что влияющая величина проходит через измерительные каналы ИК1 и ИК2 с одинаковым знаком, тогда для выходных сигналов и этих каналов запишем:
= k1Х(1 + 1м);
= k2Х0(1 + 2м).
Тогда выходная величина Y(Х) на выходе делительного устройства ДП (и СИТ) при условии 1м = 2м
![]() , (3.13)
, (3.13)
где k = k1 / (k2Х0) - коэффициент передачи СИТ с делительным устройством.
Следовательно, согласно формуле (3.13), результат измерения Y(Х) СИТ с делительным устройством не зависит от мультипликативной величины .
В тех случаях, когда влияющая величина приводит к погрешности СИТ, которая содержит аддитивную и мультипликативную составляющие, необходимо использовать комбинацию двух предыдущих схем.