

Глава 3. Логические анализаторы вариантов выхода на ось впп и снижения по глиссаде
При выходе на ось ВПП могут быть рассмотрены две возможные схемы – движение по “коробочке” или попадание на одну из двух окружностей, касательной к которым является ось ВПП. Первая схема имеет зону запрета вблизи ВПП, что является преимуществом. Поэтому она рассмотрена в данной работе.
3.1. Логический анализатор 2 вписывания в глиссаду при выходе на ось впп на заданной посадочной высоте.
Для осуществления прямолинейного движения БЛА при посадке используются логические анализаторы 2 и 3. Блок – схема логического анализатора 2 показана на рис. 3.1.
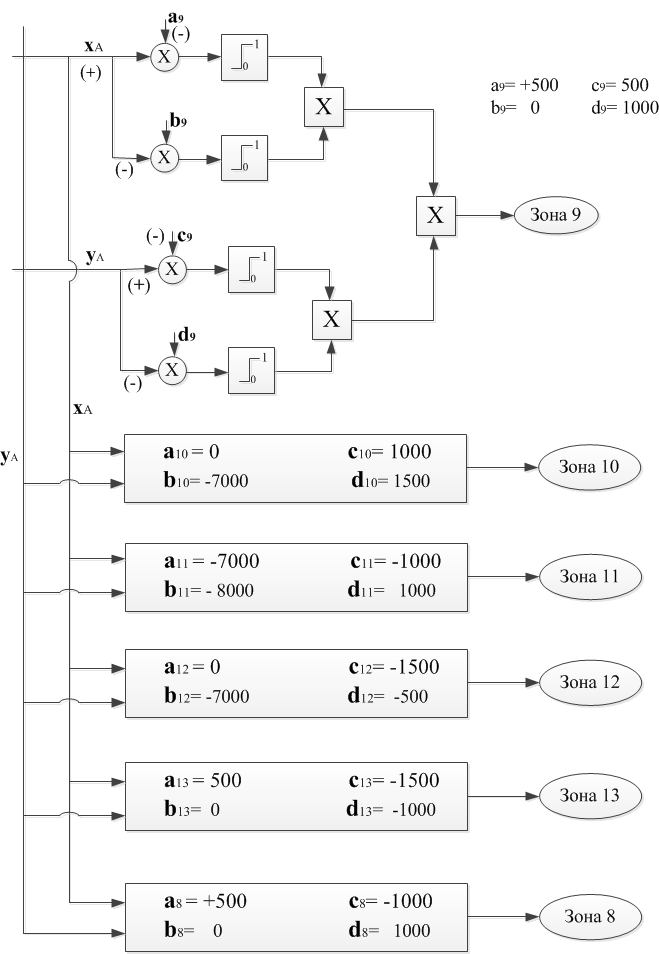
Рис.3.1. Блок-схема логического анализатора 2 при выходе на ось ВПП.
Логический анализатор 2 осуществляет альтернативный выбор заданной линии пути и значения путевого угла для каждой из показанных на рис.1.1 зон, окружающих место посадки (куда нельзя залетать никак, кроме полета по оси ВПП) и образующих замкнутый коридор в виде «коробочки». Ясно, что этот вариант выхода на ось ВПП подходит для оборудованных аэродромов, принимающих на обслуживание пилотируемую авиацию. Ясно также, что навигация осуществляется в нужной точностью с использованием СНС.
 Рис.3.2.
Состав логических операций в программе
работы анализатора 2, реализуемого на
БЦВМ
Рис.3.2.
Состав логических операций в программе
работы анализатора 2, реализуемого на
БЦВМ
Сам
анализатор 2 состоит из 6 однотипных
логических элементов, каждый из которых
проверяет условия попадания в зону с
помощью двухстороннего допуска как по
координате
![]() ,
так и по координате
,
так и по координате![]() в
аэродромной системе координат. Границы
допусков
в
аэродромной системе координат. Границы
допусков![]() ,
,
![]() ,
,
![]() ,
,
![]() назначаются
заранее. Назначенные уставки в имеющиеся
в КСУ автоматы управления боковым
движения «заставляют» БЛА двигаться
по контуру в сторону оси ВПП, по
чередующимся заданным линиям пути, и
затем происходит втягивание в глиссаду.
Состав логических операций программы
работы логического анализатора показан
на рис.3.2. На рис.1.1 показан пример работы
анализатора 2, когда БЛА попадает в
посадочную область, двигаясь по контуру
для выхода на ось ВПП, вплоть до попадания
в зону 8 вписывания в глиссаду.
Представленный пример отличается
максимальным числом возможных альтернатив
выхода на ось ВПП- их всего 6.
назначаются
заранее. Назначенные уставки в имеющиеся
в КСУ автоматы управления боковым
движения «заставляют» БЛА двигаться
по контуру в сторону оси ВПП, по
чередующимся заданным линиям пути, и
затем происходит втягивание в глиссаду.
Состав логических операций программы
работы логического анализатора показан
на рис.3.2. На рис.1.1 показан пример работы
анализатора 2, когда БЛА попадает в
посадочную область, двигаясь по контуру
для выхода на ось ВПП, вплоть до попадания
в зону 8 вписывания в глиссаду.
Представленный пример отличается
максимальным числом возможных альтернатив
выхода на ось ВПП- их всего 6.
3.2. Логический анализатор 3 снижения по глиссаде.
Действия анализатора 3 являются логическим продолжением контроля горизонтального полета БЛА по оси ВПП, в результате чего в начале определяется нужный момент снижения по прямолинейной глиссаде. На рис. 3.3 показана блок – схема логического анализатора 3, а справа – примерная картина самого снижения с разными углами наклона траектории в начале снижения, при выполнении посадочного маневра и сходе с глиссады.
Смысл логических действий в перечисленных полетных ситуациях состоит в том, что в качестве эталона нужно назначить некоторую траекторию снижения, затем в самом полете определяются нежелательные отклонения от неё по высоте и боковому движению.
Эти
отклонения поступают на вход вычислителя,
определяющего риск![]() контролируемого
снижения безопасности посадки в виде
одного числа, который затем сравнивается
с допустимым заданным порогом
контролируемого
снижения безопасности посадки в виде
одного числа, который затем сравнивается
с допустимым заданным порогом![]() .
.
Если
риск![]() ,
то полет продолжается в штатном режиме,
если риск
,
то полет продолжается в штатном режиме,
если риск![]() по
причине действия сильного ветра, то
делается первая попытка увеличить
скорость полета. В противном случае
выбирается третья вынужденная альтернатива
– уход на повторный круг.
по
причине действия сильного ветра, то
делается первая попытка увеличить
скорость полета. В противном случае
выбирается третья вынужденная альтернатива
– уход на повторный круг.
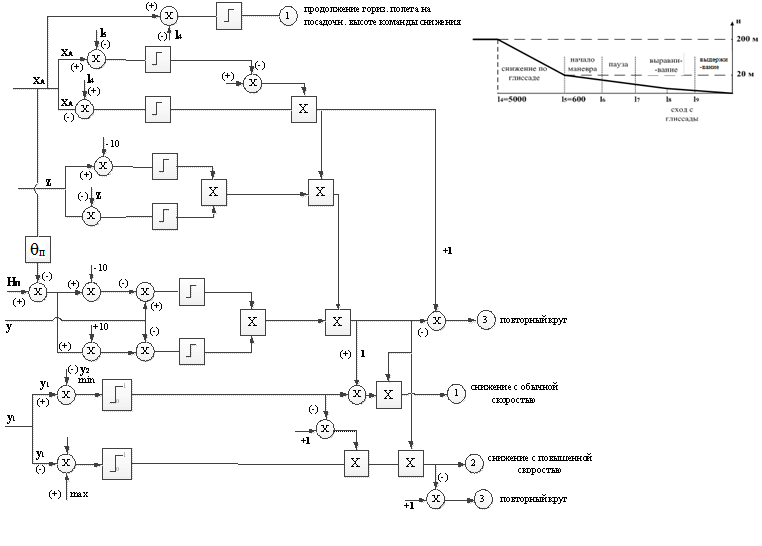
Рис.3.3. Блок-схема логического анализатора 3 вариантов снижения по глиссаде