

-
Система объектных контроллеров
Система объектных контролеров (СОК 950) является составной частью микропроцессорной централизации Ebilock 950. Она базируется на опыте, приобретенном при установке системы на более чем 100 станций различного назначения и размера, начиная с 1978 года.
Основные особенности СОК 950: высокая надежность передачи данных; короткое время реакции на события; расширенная система диагностики; возможность взаимодействия с ответственными (безопасными) и не ответственными объектами; возможность быстрой адаптации, функционирование и интерфейс для обеспечения взаимодействия с новыми типами напольного оборудования; упрощенное создание проектов для новых станций; уменьшенные физические размеры; модульная структура, упрощающая монтаж и обслуживание; обратная совместимость с системами предыдущего поколения (Ebilock 850); возможность адаптации системы к специальным требованиям заказчика; сокращение расходов в течение жизненного цикла системы; сокращение времени возврата средств вложенных в систему.
Каждый объектный контроллер может управлять и контролировать один или несколько напольных объектов в зависимости от их типа, используя для этого микропроцессор со специальной программой (Рис. 9).
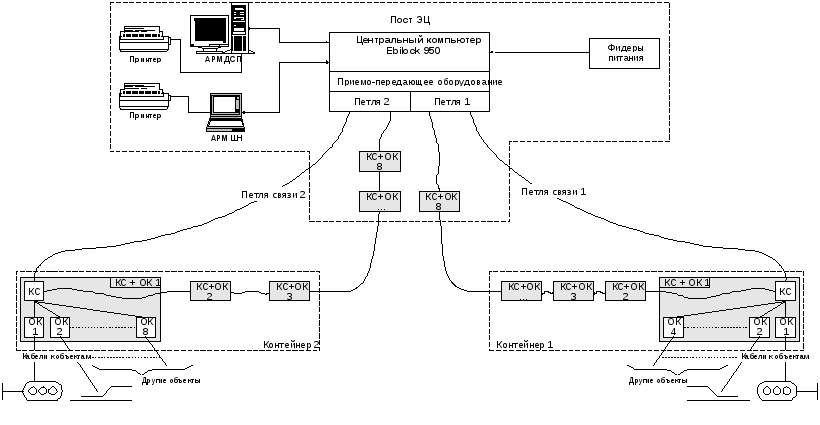
Рисунок 9.
Применение распределенной структуры объектных контроллеров позволяет разместить их в непосредственной близости от напольного оборудования. Для этого могут быть использованы специальные шкафы. Они позволяют установить два УКП, шестнадцать ОК и необходимый источник питания. В зависимости от сложности конфигурации напольного оборудования один шкаф объектных контроллеров может быть использован для управления объектами в одном районе станции, нескольких районах или всей станции. Общая емкость системы по адресации может быть сокращена в зависимости от объема данных (длина телеграммы) и требуемого времени реакции системы для обслуживания различного напольного оборудования.
Система объектных контроллеров поддерживает два интерфейса: с петлей связи для компьютера централизации и с напольными устройствами. Основными компонентами системы являются: петля связи между устройствами контроля передачи- концентраторами и КЦ, концентраторы (УКП), система связи УКП с объектными контроллерами ОК и кабели от них к напольному оборудованию. Требования безопасности при передаче телеграмм обеспечиваются КЦ и объектными контроллерами. В то же время петля связи, УКП и система связи с ОК является только средой передачи данных и не обеспечивается специальными средствами безопасности данных. Петля связи между КЦ и УКП, кабели от объектных контроллеров к напольному оборудованию не являются частями СОК. Заказчику могут быть предоставлены рекомендации по применению кабелей для данных целей.
Порт петли связи является частью КЦ. Он обеспечивает ее подключение к центральному компьютеру, подготовку телеграмм необходимого формата и поддержание протокола приема и передачи информации по петле связи. В системе СОК данное устройство обозначается как модуль ввода/вывода (IOM).
Петля связи с концентраторами используется для передачи данных между модулем ввода/вывода IOM и концентраторами. Физической основой петли является четырехпроводный телекоммуникационный кабель, подключаемый к внутренним модемам. Обычно КЦ взаимодействует с концентраторами с одной стороны петли, передавая информацию и контролируя ее с другой. В случае повреждения кабеля КЦ автоматически изолирует его поврежденный участок, обеспечивая связь с концентраторами с обеих сторон петли. Такое решение обеспечивает непрерывность передачи информации для работоспособной части петли.
Концентратор (УКП) является промежуточным передаточным звеном между модулем ввода/вывода IOM и объектными контроллерами. Он также используется для регенерации сигналов, когда расстояние между двумя концентраторами достаточно большое. Концентратор является “прозрачным” устройством для КЦ и объектных контроллеров. В связи с этим к нему не предъявляются требования по безопасности.
Являясь аппаратно избыточным устройством, УКП (концентратор) обеспечивает непрерывность передачи информации в случае аппаратных отказов. При сбое в системе питания КЦ автоматически изолирует отказавший УКП, реконфигурируя петлю и обеспечивая связь с другими концентраторами с обеих ее сторон.
Связи с объектными контроллерами используются для передачи данных между УКП и объектными контроллерами. Данные каналы связи могут быть использованы только внутри одного шкафа.
Объектный контроллер- устройство, осуществляющих контроль и управление специфичным напольным оборудованием. Объектные контроллеры от концентратора принимают приказы, передаваемые КЦ, и преобразуют их в электрические сигналы для управления напольными устройствами. Аналогичным образом сигналы, принятые от напольного оборудования, преобразуются в телеграммы его состояния и через концентраторы передаются в КЦ. Отказы в объектном контроллере приводят к изоляции соответствующего подключенного напольного оборудования. При этом данная ситуация обрабатывается безопасным образом.
Объектные кабели представляют собой многопроводные сигнальные кабели СЦБ. Они используются для передачи контрольных и управляющих сигналов между объектными контроллерами и напольным оборудованием.
Напольное оборудование- это набор различных устройств, обеспечивающих движение поездов (стрелки, сигналы и т.п.).
Сигнальный объектный контроллер управляет сигнальными показаниями и контролирует состояния светофорных ламп.
Снижение сигнальных показаний. Включение более запрещающего сигнального показания вместо требуемого в случае обнаружения неисправности в лампах, необходимых для его отображения (например, сигнальное показание “желтый” при неисправности лампы зеленого огня светофора).
“Мягкое” включение ламп. Снижает нагрузку на лампы при их включении из холодного состояния.
Регулировка уровня яркости ламп. Выходное напряжение может быть между двумя различными уровнями “высокий” и “низкий” - в зависимости от требуемой яркости свечения ламп (например: “день”/”ночь”).
Двухнитевые лампы. Надежность работы сигналов может быть повышена за счет применения двухнитевых ламп вместо однонитевых.
Мигающие сигнальные показания. Возможность отображения сигнальных показаний с мигающим состоянием ламп.
Обнаружение ошибок заземления. Ошибки заземления жил кабеля между объектным контроллером и сигнальными лампами обнаруживаются и индицируются.
Основными функциями стрелочного объектного контроллера являются: определение состояния стрелки (левое, правое, потеря контроля, взрез); управление электродвигателем стрелочного электропривода в соответствии с командами КЦ при централизованном управлении или состоянием кнопок местного управления в соответствующем режиме; контроль состояния стрелочных замков. Данная функция обеспечивает контроль состояния внешних замков стрелочного привода или замков стрелок с ручным управлением.
Стрелочный объектный контроллер поддерживает использование следующих типов электродвигателей для стрелочных электроприводов: однофазный переменного тока, трехфазный переменного тока, постоянного тока.
Электродвигатель стрелочного электропривода подключается непосредственно к объектному контроллеру. Это исключает необходимость применения дополнительных устройств.
В связи с тем что выходы объектного контроллера не предназначены для продолжительной работы, возможно кратковременное прерывание операции перевода стрелки в случае перегрузки выхода.
Если операция перевода стрелки не будет завершена в течение предопределенного периода времени, напряжение будет отключено от электродвигателя для предотвращения возможности его дальнейшего вращения и защиты от повреждения.
Ошибки заземления жил кабеля между объектным контроллером и стрелочным электроприводом обнаруживаются и индицируются.
Стрелочный объектный контроллер позволяет управлять несколькими электроприводами (спаренные стрелки, стрелки с подвижным сердечником). Многоприводные стрелки требуют координированного управления несколькими электроприводами. Система централизации рассматривает такие стрелки, как один логический объект, в то же время СОК управляет каждым из стрелочных приводов отдельно. Стрелочный объектный контроллер может оперировать не более чем с двумя стрелочными электроприводами, объединенными в один логический объект.
Состояние стрелки передается в КЦ как состояние одного логического объекта. Оно получено в результате логической операции «И» над состояниями стрелочных электроприводов, относящихся к данному логическому объекту.
В связи с тем, что одновременный запуск нескольких электродвигателей стрелочных электроприводов может служить причиной значительного возрастания потребляемого тока, для каждого управляющего выхода предусматривается индивидуальная временная задержка.
В случае механических повреждений стрелочного перевода, приведших к невозможности работы одного из электродвигателей логического стрелочного перевода, все электроприводы будут отключены с целью сохранения работоспособности остальных компонентов стрелочных переводов.
Некоторые типы стрелок требуют применения отдельных замков, которые могут контролироваться СОК. Обычно такие замки представляют собой электромагнитные устройства. Управляющее воздействие для таких замков представляет собой сигнал постоянного тока, генерируемый безопасным образом. Состояние таких замков может контролироваться схемой, определяющей состояние свободных контактных групп.
Для некоторых случаев требуется возможность местного управления стрелкой. При работе в таком режиме состояние стрелки контролируется КЦ, но управление ею осуществляется локально. Местное (локальное) управление стрелками может быть осуществлено с помощью соответствующего набора оборудования. Он состоит из одной или двух кнопок для перевода стрелки и ламп, индицирующих ее состояние при этом режиме работы.
СОК может быть переключена в различные режимы управления стрелкой (стрелками). В режиме центрального управления стрелка управляется и контролируется КЦ. Переход на местное управление стрелкой выполняется по команде КЦ. В режиме местного управления стрелка управляется при помощи соответствующих кнопок, в то же время КЦ контролирует ее состояние. В режиме местного управления объектный контроллер отвергает все команды от КЦ на перевод стрелки, пока она не будет возвращена на центральное управление.
Локальные лампы индикации состояния стрелки располагаются совместно с другим оборудованием местного управления. Они подключаются к соответствующим выходам объектного контроллера и индицируют состояние стрелки.
Режим резервного управления представляет собой специальную разновидность режима местного управления. Полный набор реализуемых функций зависит от конкретных требований рынка. Следующие функции, однако, могут служить иллюстрацией этого режима работы.
Ключ резервного управления. Установка специального ключа проверяется системой объектных контроллеров СОК.
После установки резервного ключа СОК информирует центральный компьютер централизации КЦ о новом состоянии объекта. После предопределенной временной задержки появляется возможность управления стрелкой аналогично режиму местного управления. Стрелка в режим центрального управления возвращается после изъятия ключа резервного управления и проверки КЦ корректности состояния стрелочного перевода.
Стрелка с ручным управлением (без электродвигателя) может быть также подключена к централизации. Обычно стрелка заперта в некотором определенном положении и должна быть открыта перед ее переводом в соответствии с командой КЦ. Электромагнитное устройство запирает стрелку при использовании специального ключа.
Объектный контроллер безопасного ввода/вывода обеспечивает управление выходным напряжением, контроль состояния контактов схем и управление реле первого класса надежности.
Могут быть определены следующие состояния контактов релейной схемы: замкнут, разомкнут, обрыв, короткое замыкание.
Типичными примерами использования данного типа контроллеров является построение интерфейсов с такими релейными устройствами как, счетчики осей, автоблокировка, переездная сигнализация.
Объектный контроллер не ответственного ввода/вывода обеспечивает управление выходным напряжением для схем и устройств, не предъявляющих специальных требований по безопасности. Типичными примерами различного применения этого типа контроллеров является построение систем обогрева и обдува стрелок.
Задачей контроля состояния рельсовых цепей является определение их свободности/занятости.
В случае проследования короткой подвижной единицы через короткую рельсовую цепь вводится определенная временная задержка на изменение состояния рельсовой цепи с занятого на свободное.
Для предотвращения нежелательного кратковременного изменения состояния контактов (“дребезг”) можно использовать определенное время диагностики состояния контактов реле.
Основной задачей функции контроля состояния контактов является достоверное определение состояния различного типа релейных интерфейсов и подобных устройств (стрелки, контакты реле, специальные ключи, кнопки). Эта задача может быть решена как для безопасного определения состояния контактов, так и для случая не ответственных приложений, в зависимости от решаемой задачи.
В связи с тем что к обмену информацией между центральным компьютером централизации КЦ и системой объектных контроллеров СОК предъявляются высокие требования по безопасности, данные сообщения имеют большую информационную избыточность. Такое решение обеспечивает высокую степень защиты данных от искажений с точки зрения безопасности.
Управляющие сообщения представляют собой битовую последовательность. Она генерируется центральным компьютером и передается определенному объектному контроллеру для воздействия на необходимый элемент напольного оборудования. Сообщения о его состоянии генерируются объектным контроллером. Это необходимо для информирования центрального компьютера о состоянии соответствующего напольного оборудования. Все сообщения приказов и состояний дублируются для обеспечения безопасности системы. Программа А генерирует сообщение А в то время, когда программа Б генерирует сообщение Б. В дополнение к данным каждое сообщение снабжается уникальным адресом, ссылочным типом, меткой времени и избыточными данными для обеспечения безопасности.
Пары сообщений генерируются и передаются в течение одного и того же цикла передачи. До передачи информации в петлю связи с концентраторами несколько сообщений может быть объединено в одну телеграмму. После приема данная информация распаковывается и анализируется. Эти операции выполняются портом петли связи (IOM) со стороны КЦ и УКП со стороны СОК. Несмотря на то, что передаваемые сообщения приказов и состояний имеют некоторые отличия формата, используемые принципы обеспечения безопасности данных являются универсальными для всех случаев.
При приеме адресованной УКП телеграммы он распаковывает ее и передает информацию соответствующим объектным контроллерам. Каждый объектный контроллер проверяет принятые телеграммы А и Б на логическое совпадение и осмысленность, используя при этом программы А и Б, соответственно. В случае обнаружения программами А и/или Б несоответствия между телеграммами весь приказ для соответствующего объектного контроллера отвергается и ЦКЦ посылается сообщение о некорректной телеграмме с указанием причины ошибки.
Рекомендуемые
шкафы для размещения объектных
контроллеров системы СОК
950 представляют
собой пару соединенных между собой
шкафов. Каждый из них предназначен для
установки стандартной 19”
стойки
(рис.10).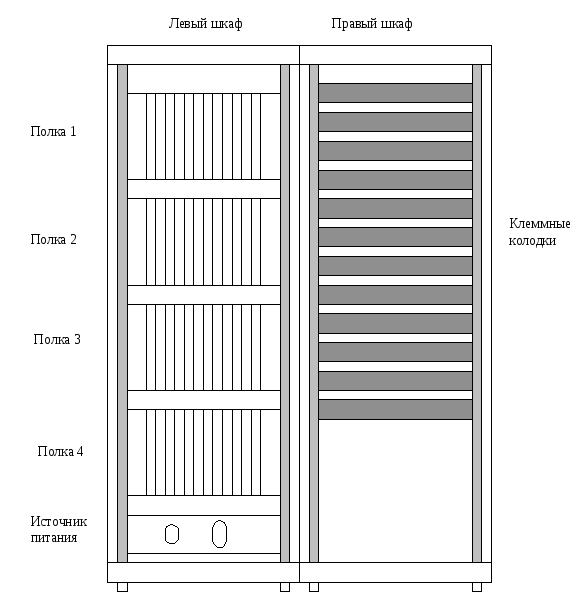
Рисунок 10.
Левый шкаф служит для размещения полок с объектными контроллерами (до 16 ОК), связевых концентраторов (УКП), источника питания и панели предохранителей. Правый шкаф предназначен для установки монтажных (клеммных) колодок. Они необходимы для подключения всех внешних кабелей, которые вводятся в правый шкаф через специальные кабельные вводы. Отсутствие внутренней стенки между двумя шкафами дает возможность организовать кабельные переходы между ними.
Шкафы объектных контроллеров могут быть установлены как внутри станционных помещений, так и в специальных контейнерах в непосредственной близости от напольного оборудования. Следует заметить что допускается использование любых видов контейнеров для размещения железнодорожного оборудования при условии обеспечения ими защиты от атмосферного влияния.
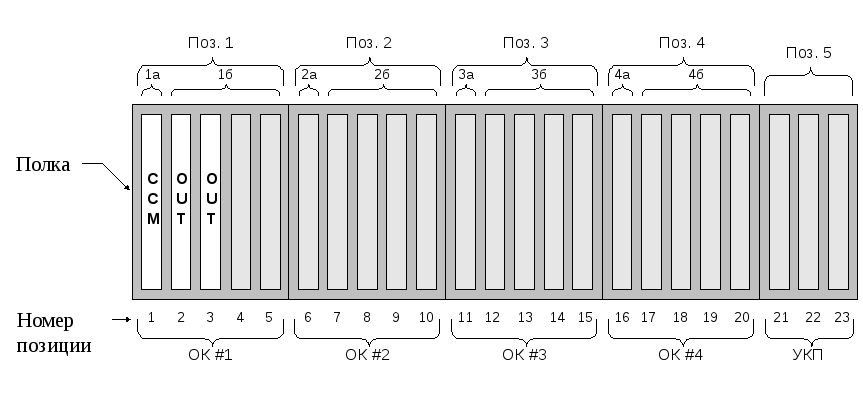
Рисунок 11
Каждая полка (рис.11) имеет 23 посадочных места для плат интерфейсных модулей. Посадочные места разбиты на пять групп. Позиции с первой по четвертую отводятся для размещения объектных контроллеров. Пятая позиция предназначена специально для связевого концентратора.
Необходимые внутренние соединения между отдельными платами выполняются методом печатного монтажа, выполненного на задней стенке полки. Позиции “а” и первая ”б” в каждой группе, кроме этого, имеют необходимые соединения с посадочными местами, отведенными для УКП. Эти посадочные места предназначены для установки “главных” модулей объектного контроллера.
Для настройки объектных контроллеров в соответствии с проектом для конкретной станции применяются микропереключатели. Они расположены на задней стенке полки. Микропереключатели используются для установки типа и адреса каждого ОК. Кроме этого, применяются специальные ключи-маркеры для модулей и кабелей. Все необходимые соединения между объектными контроллерами и напольным оборудованием выполняются кабелями. Они подключаются через передние разъемы плат.
Система объектных контроллеров СОК представляет собой модульную систему. Она обеспечивает взаимодействие с большим набором различных напольных устройств. Интерфейсные модули монтируются на печатных платах и устанавливаются на полках для объектных контроллеров. Типичный объектный контроллер представляет собой набор печатных плат для обеспечения функций ввода/вывода и обработки информации в соответствии с заданными требованиями.
Плата CCM- модуль является ядром объектного контроллера. Она обеспечивает контроль состояния контактов. Модуль содержит четыре канала безопасного контроля состояния контактов (рельсовые цепи), шесть каналов не ответственного вывода данных и два канала не ответственного ввода данных.
Концентратор осуществляет обмен информацией с другими системами, например, с КЦ через петлю связи, а также с персональным компьютером для диагностики и тестирования. Две платы СОМ (одна находится в горячем резерве) совместно с модулем ОСТ образуют УКП. УКП может обеспечивать связь с восемью объектными контроллерами.
Плата LMP применяется для управления сигналами и маршрутными указателями. Каждый модуль может управлять и контролировать до шести ламп (две лампы для запрещающих показания и четыре для разрешающих).
Плата MOT1 служит для управления стрелочными электроприводами переменного тока. Один объектный контроллер может управлять максимум двумя стрелочными электроприводами (спаренные стрелки или стрелка с подвижным сердечником).
Плата MOT2 используется для управления стрелочными электроприводами постоянного тока. Один объектный контроллер может управлять максимум двумя стрелочными электроприводами (спаренные стрелки или стрелка с подвижным сердечником).
Плата OCT (“Осьминог”) служит для обеспечения взаимодействия между объектными контроллерами и УКП, а также разводки внутри полки питания, необходимого для работы ОК. Кроме этого, этот модуль применяется для соединения УКП с объектными контроллерами на соседних полках, когда это необходимо.
Плата OUT- модуль, используется для управления не ответственными устройствами, например, системой обогрева и обдува стрелок. Объектный контроллер с набором таких плат может иметь максимум 78 выходов данного типа.
Плата SRC- может быть применена для безопасного управления реле первого класса надежности. Объектный контроллер, оснащенный такими платами, может управлять максимум 12 реле. Примерами использования такого объектного контроллера могут быть интерфейсы с релейными устройствами (автоблокировка, переездная сигнализация и т.п.).
Обеспечение безопасности является первоочередной задачей на всех этапах: разработка системы, ее проектирование, монтаж, тестирование и обслуживание. Система объектных контроллеров обеспечивает безопасность за благодаря применению ряда технических решений. К ним относятся: диверсификация программ, принцип обратной связи, безопасное аппаратное обеспечение.
Диверсификация программ является технологией разработки программного обеспечения. При ней программы, выполняющие одинаковые логические функции, разрабатываются двумя командами программистов с целью обнаружения ошибок и повышения надежности работы системы. Обе программы работают на одном микропроцессоре в реальном масштабе времени со сравнением результатов вычислений. В случае обнаружения расхождения между результатами работы программ система переходит в безопасное состояние.
Принцип обратной связи обеспечивает сравнение фактического состояния напольного оборудования с ожидаемым в результате выдачи управляющих воздействий. Данное сравнение ведется непрерывно с выдачей сообщения об ошибке и переводом системы в безопасное состояние в случае обнаружения расхождений.
Средства безопасности анализируются с применением анализа дерева отказов (FTA) и возможных отказов и их последствий (FMEA). Ведется контроль времени жизни и актуальности данных. Высокие требования безопасности должны поддерживаться высокими стандартами качества. Система обеспечения качества ADtranz Signal сертифицирована в соответствии с международным стандартом ISO 9001.
СОК оборудована расширенной системой диагностики и самотестирования. Диагностические операции начинаются в момент включения системы и продолжаются в фоновом режиме в процессе ее работы. Такое решение исключает возможность появления систематической ошибки.
Кроме этого, возникающие сбои и ошибки быстро обнаруживаются и идентифицируются. СОК передает предупреждения в КЦ, если объектный контроллер или какой либо из элементов напольного оборудования отклоняется от нормального режима работы. Проверки ведутся во всех точках принятия решения о дальнейших действиях системы.
Если обнаруженный отказ ведет к невозможности дальнейшей безопасной работы устройств, то объектный контроллер будет остановлен. Контролируемые им напольные устройства переведены в безопасное состояние.
Данные по установке системы и монтажные документы готовятся с применением специального набора инструментария EBITOOL. Использование “дружественного” к пользователю программного обеспечения позволяет получить большую часть данных автоматически по окончанию разработки чертежей для станции. Существуют дополнительные возможности проверки правильности и логической корректности полученных данных.
На этапе проектирования выдается прикладное программное обеспечение КЦ, документация на установку КЦ, АРМов, контейнеров СОК, документация по кабельной сети, спецификация необходимого оборудования.