

Глава 13 ///////////////////////////////////////////////////////////////////////////////////
Плоскопараллельное движение тела
Скорость
B
точки В
плоской
фигуры, полученной при сечении движущегося
тела плоскостью, параллельной направляющей
плоскости, равна геометрической сумме
скорости
A
полюса А фигуры
и скорости
 данной точки В
при вращательном
движении фигуры вокруг оси, проходящей
через полюс А
и перпендикулярной
плоскости фигуры:
данной точки В
при вращательном
движении фигуры вокруг оси, проходящей
через полюс А
и перпендикулярной
плоскости фигуры:
B
=
A
+
;
 AB;
BA=
lAB,
(13.1)
AB;
BA=
lAB,
(13.1)
где - угловая скорость фигуры, не зависящая от выбора полюса. Полюсом фигуры может служить любая ее точка.
Проекции скоростей двух точек твердого тела на прямую, соединяющую эти точки, равны между собой (теорема о проекциях скоростей).
Мгновенный центр скоростей (МЦС) плоской фигуры – такая ее точка, скорость которой в данный момент времени равна нулю.
Скорости всех остальных точек плоской фигуры могут быть определены как скорости точек при вращательном движении фигуры вокруг МЦС:
A
 lAP
;
AP
, где
точка Р -
МЦС.
lAP
;
AP
, где
точка Р -
МЦС.
Ускорение
 точки В
плоской
фигуры равно геометрической сумме
ускорения
точки В
плоской
фигуры равно геометрической сумме
ускорения
 полюса А
и ускорения
полюса А
и ускорения
 данной
точки В при
вращательном движении фигуры
данной
точки В при
вращательном движении фигуры
вокруг оси, проходящей через полюс А и перпендикулярной плоскости фигуры:
 (13.2)
(13.2)
 =
=
 ,
,
 ,
,
 =
= ,
,
где - угловое ускорение фигуры, = d / dt = .
13.1. Механизм подачи бурового станка (рис. 13.1, а) приводится в движение с помощью цепи 7, огибающей звездочки 2, 2' и 3; последняя жестко связана с колесом 4, катящимся по рейке 5. Известны скорость цепи u, радиус R звездочки 3 и радиус r колеса 4. Определить скорость бурового инструмента и угловую скорость звездочки 3.

Рис. 13.1
Решение. Известно, что угловая скорость ведомой звездочки цепной передачи - величина переменная даже при постоянной скорости цепи. Однако соблюдение определенных рекомендаций при выборе конструктивных параметров передачи (числа зубьев звездочки, шага цепи и др.) позволяет снизить периодическое изменение угловой скорости до 1 - 2 % [3]. В данном случае, когда скорость цепи весьма мала, колебаниями угловой скорости звездочки 3 и колеса 4, а следовательно, и колебаниями скорости v перемещения бурового инструмента безусловно
можно
пренебречь и считать, что скорость точки А
звездочки
(рис. 13.1, б) равна скорости и
цепи.
точки А
звездочки
(рис. 13.1, б) равна скорости и
цепи.
Полюс
 зацепления колеса 4
с
неподвижной рейкой 5
является
мгновенным центром скоростей (МЦС) звена
3-4 и
поэтому угловая скорость звездочки
зацепления колеса 4
с
неподвижной рейкой 5
является
мгновенным центром скоростей (МЦС) звена
3-4 и
поэтому угловая скорость звездочки

а скорость центра колеса, т. е. скорость перемещения бурового инструмента:
= r = r и /(R + r).
Ответ:
= r
и /(R
+ r);
= .
.
13.2. Определить скорость v подъема бурового инструмента 1 и угловую скорость блока 2 (рис. 13.2, а), если скорость каната 3 равна и, а радиус блока r.

Рис. 13.2
Решение.
Канат, принимаемый за нерастяжимую
нить, огибает блок 4,
вращающийся
вокруг неподвижной оси, следовательно,
все точки каната на участке O2C
имеют в
данный момент скорость
,
направленную вертикально вверх, а на
участке ВА
-такую же по
величине скорость
,
но направленную вертикально вниз, т. е.
A
=- и
A
=
и
A
= =
.
МЦС блока 2 расположен в точке пересечения
прямой AD
и линии,
проведенной через
=
.
МЦС блока 2 расположен в точке пересечения
прямой AD
и линии,
проведенной через
концы векторов A и (рис. 13.2, б). Поскольку скорости точек А и 02 одинаковы, то и отрезки АР2 и Р202 равны между собой, т. е.
AP2 = P2O2= r/2.
Скорость D каната в точке D равна и, поэтому угловая скорость блока 2
= u / DP2 = и / (r + r /2) = 2 и / (3r).
Скорость центра O2 блока 2, т. е. скорость подъема бурового инструмента:

Ответ: = u / 3; = 2u / (3r).
13.3. Механизм подачи шпинделя 1 бурового станка приводится в движение от гидроцилиндра 2 через систему блоков 3, ..., 6 (рис. 13.3, а). Скорость штока гидроцилиндра равна u, радиусы блоков одинаковы. Определить скорость шпинделя и отношение угловых скоростей блоков.
а б г
б г
Рис. 13.3
Решение. Канат считаем гибкой нерастяжимой нитью. Крайняя левая ветвь каната неподвижна, скорости всех ее точек в длимый момент равны нулю, следовательно, точка А – МЦС блока 3 (рис. 13.3, б). Скорость центра этого блока равна скорости штока гидроцилиндра, тогда
 ;
;

Скорость
 точки С каната
(рис. 13.3, в) по величине и направлению
равна скорости точки В.
Центр блока
4 неподвижен,
поэтому
точки С каната
(рис. 13.3, в) по величине и направлению
равна скорости точки В.
Центр блока
4 неподвижен,
поэтому
A
=- ;
;
 =
=
=
2u;
4
=
/
r = 2 u / r.
=
=
=
2u;
4
=
/
r = 2 u / r.
Скорость
 точки
Е каната
по величине и направлению равна скорости
точки D.
Центр блока
5 движется
со скоростью штока гидроцилиндра,
поэтому картина скоростей точек этого
блока, расположенных на горизонтальном
диаметре, имеет вид, показанный на рис.
13.3, г, где
точка Р5
- МЦС блока
5. Угловая скорость блока 5
точки
Е каната
по величине и направлению равна скорости
точки D.
Центр блока
5 движется
со скоростью штока гидроцилиндра,
поэтому картина скоростей точек этого
блока, расположенных на горизонтальном
диаметре, имеет вид, показанный на рис.
13.3, г, где
точка Р5
- МЦС блока
5. Угловая скорость блока 5
5
= / (r-x)
=
/
x,
или и
/ (r-x)
= 2 u/x,
/ (r-x)
=
/
x,
или и
/ (r-x)
= 2 u/x,
откуда х = 2 r / 3, следовательно,
5
= / (2r
/ 3)
=
/ (2r
/ 3)
=
 ;
;
 =
5
=
5

От точки F до места крепления со шпинделем все точки центральной оси каната имеют одинаковую по модулю скорость, вследствие этого скорость шпинделя = = 4u, а угловая скорость блока 6:
6
=
 = 4
u
/ r.
= 4
u
/ r.
Отношение угловых скоростей:
3: 4: 5: 6 =(u / r) :(2 u / r) :(3 u / r) : (4 u / r) = 1 : 2 : 3 : 4.
Ответ:
 ;
3:
4:
5:
6=
1
: 2 : 3 : 4.
;
3:
4:
5:
6=
1
: 2 : 3 : 4.
13.4. Поворотная платформа экскаватора опирается на гусеницы в трех точках, являющихся вершинами равнобедренного треугольника ABC, в котором АС = ВС (рис. 13.4, а). Скорость точки А перпендикулярна АВ, скорость точки С направлена вдоль АС. Определить угловую скорость платформы и скорость точки В, если известны скорость точки А, длина стороны АВ треугольника (АВ = l) и угол α.

б
a

Рис. 13.4
Решение. Мгновенный центр скоростей платформы находится в точке пересечения перпендикуляров, восставленных из точек А и В к векторам скоростей этих точек (рис. 13.4, б).
Угловая скорость платформы
= A /АР.
Вычисляем длину отрезка АР (см. рис. 13.4, б):
AP=AC/
cos
α =

Тогда



Если
>
 / 4, то
B
> 0 и
B
/ 4, то
B
> 0 и
B
 A;
если
<
/ 4, то
B
< 0 и
B
A;
если
<
/ 4, то
B
< 0 и
B
 A;
если
=
/ 4, то
B
= 0, т. е.
вращение происходит вокруг
вертикальной оси, перпендикулярной
платформе и проходящей
через точку В
(МЦС - в точке
В).
A;
если
=
/ 4, то
B
= 0, т. е.
вращение происходит вокруг
вертикальной оси, перпендикулярной
платформе и проходящей
через точку В
(МЦС - в точке
В).
Ответ:
=
 ;
B
=
A
|cos
2
|, причем
B
A,
если
>
/ 4;
B
A,
если
<
/ 4.
;
B
=
A
|cos
2
|, причем
B
A,
если
>
/ 4;
B
A,
если
<
/ 4.
13.5. Внутри ходового колеса 1 (рис. 13.5, а) погрузочной машины помещен планетарный механизм, зубчатое колесо 2 которого жестко связано с корпусом машины, движущейся поступательно. Колесо 3 вращается с известной угловой скоростью ю; оси колес 4 жестко связаны с ходовым колесом. Известно отношение чисел зубьев z3 / z4 = i и радиус R. Определить скорость корпуса машины, если проскальзывание ходовых колес по почве отсутствует.
б
a
Рис. 13.5
Решение. Колесо совершает плоскопараллельное движение, которое можно представить состоящим из поступательного движения со скоростью центра солнечного колеса 3, т. е. со скоростью v корпуса машины, и вращательного движения вокруг этого центра с угловой скоростью .
Поскольку кинематические характеристики вращательной части движения не зависят от выбора полюса, такая разбивка движения на его составные части позволяет найти абсолютную угловую скорость колеса 1, рассматривая только его вращение вокруг неподвижной центральной оси.
Окружная скорость солнечного колеса 3

Сателлит 4
перекатывается
по неподвижному коронному колесу 2,
следовательно, МЦС сателлита совпадает
с полюсом
 ,
4 зацепления зубчатых колес 2
и 4
(рис. 13.5, б),
при этом
скорость
,
4 зацепления зубчатых колес 2
и 4
(рис. 13.5, б),
при этом
скорость
 центра O4
сателлита 4
равна половине
окружной
скорости
солнечного колеса (
=
центра O4
сателлита 4
равна половине
окружной
скорости
солнечного колеса (
=
 / 2).
/ 2).
Окружная скорость водила O4O3 равна скорости центра сателлита 4, а отношение чисел зубьев колес равно отношению их радиусов, поэтому угловая скорость водила

Роль
водила в заданном механизме выполняет
ходовое колесо 1,
следовательно,
=
 .
Мгновенным центром колеса 1
является точка
Р1
(рис. 13.5, в)
его контакта с почвой, поэтому скорость
центра O1
колеса 1,
равная скорости корпуса машины,
определяется
как скорость точки тела при его вращении
вокруг МЦС:
.
Мгновенным центром колеса 1
является точка
Р1
(рис. 13.5, в)
его контакта с почвой, поэтому скорость
центра O1
колеса 1,
равная скорости корпуса машины,
определяется
как скорость точки тела при его вращении
вокруг МЦС:
=
 O1P1
=
O1P1
=
 =
iR
/
[2(1 + i)].
=
iR
/
[2(1 + i)].
Ответ: = iR / [2(1 + i)].
13.6. Планетарный исполнительный орган щита для проходки стволов (рис. 13.6, а) имеет режущие коронки 1, жестко связанные с зубчатыми колесами (сателлитами) 2, оси которых закреплены на водиле 4 радиусом R. Колеса 2 перекатываются по неподвижному коронному колесу 3. Известны: отношение λ = R / r = 1,11; радиус коронки r = 0,72 м; отношение чисел зубьев i = z3 / z2 = 4,7; угловая скорость водила = 0,7 с-1. Найти скорость режущего инструмента M, закрепленного на периферии коронки, положение которого определяется в данный момент углом φ. Чему равны максимальная и минимальная скорости резания?
б
a

Решение. Звено, состоящее из жестко связанных между собой режущей коронки 1 и зубчатого колеса 2 (сателлита), совершает плоскопараллельное движение. Чтобы найти скорость расположенного на коронке режущего инструмента М, достаточно знать его расстояние Р2,3М от мгновенного центра скоростей коронки и ее угловую скорость.
МЦС коронки совпадает с полюсом Р2,3 зацепления сателлита с неподвижным коронным колесом 3 (рис. 13.6, б).
Скорость центра O1 сателлита равна окружной скорости водила OO1.

Угловую скорость сателлита определяем, учитывая, что отношение радиусов начальных окружностей находящихся в зацеплении зубчатых колес равно отношению чисел их зубьев:

Расстояние Р2,3 М находим по теореме косинусов:
Р2,3
М
= ,
,
где
- радиус
коронки (
= r);
- радиус
начальной окружности сателлита (
=
 - R).
Поскольку
=
i,
а R
=
λ,
то
= r2i
-
λ,
откуда
-
λ
/(i
- 1). Следовательно,
- R).
Поскольку
=
i,
а R
=
λ,
то
= r2i
-
λ,
откуда
-
λ
/(i
- 1). Следовательно,
Р2,3
М
= =
=
 .
.
Теперь можно вычислить скорость режущего инструмента:

= .
.
Скорость резания
минимальна, когда
 = 1, а
= 0:
= 1, а
= 0:
 =1,305
м/с.
=1,305
м/с.
Скорость резания максимальна, когда = -1, а = π:
 =2,424
м/с.
=2,424
м/с.
Ответ:

 ;
;
 ;
;
13.7.
Поршень
A
механизма поворота ковша автопогрузчика
(рис. 13.7, а)
движется
равномерно со скоростью
A
= 0,1м/с.
Для положения,
изображенного на рисунке, определить
скорости точек С, D
и Е,
а также
угловые скорости всех ведомых звеньев
механизма,
если
 .
.

Рис. 13.7
Решение. Точка В принадлежит одновременно поршню А и шатуну ВС. Поршень перемещается в прямолинейных неподвиж-ных направляющих, следовательно, его движение - поступательное, скорости всех его точек одинаковы, т.е. B = A = 0,1 м/с.
Траекторией
точки С
является
дуга окружности радиусом ОС,
поэтому ОС.
Проведя
перпендикуляр к вектору
ОС.
Проведя
перпендикуляр к вектору
 до
пересечения с перпендикуляром к
,
находим МЦС шатуна ВС,
в
данном случае совпадающий с точкой О.
Поскольку
Δ
ОВС
-равносторонний,
то СО
= ВО, поэтому
vC
= vB
=
0,1 м/с.
до
пересечения с перпендикуляром к
,
находим МЦС шатуна ВС,
в
данном случае совпадающий с точкой О.
Поскольку
Δ
ОВС
-равносторонний,
то СО
= ВО, поэтому
vC
= vB
=
0,1 м/с.
Скорости точек плоской фигуры пропорциональны их расстояниям от МЦС, поэтому
vD = 2 vC = 0,2 м/с.
Вектор
 скорости
точки Е,
как
и вектор
скорости
точки Е,
как
и вектор
 скорости точки D,
направлен
по прямой DE,
поэтому
в соответствии с теоремой о проекциях
скоростей (см. начало главы)
скорости точки D,
направлен
по прямой DE,
поэтому
в соответствии с теоремой о проекциях
скоростей (см. начало главы)
vE = vD = 0,2 м/с.
Отметим, что МЦС шатуна DE находится в бесконечности (так как перпендикуляры к векторам и параллельны), следовательно, движение этого звена в данный момент мгновенно поступательное и ωDΕ=0.
Находим угловые скорости остальных звеньев:



Ответ: vC = 0,1 м/с; vD = 0,2 м/с; νE = 0,2 м/с;

13.8. Кривошип OA механизма грохота (рис. 13.8, а) вращается с частотой n = 1000 мин-1. Для положения, показанного на рисунке, определить скорости точек В, D и Е, а также угловые скорости всех ведомых звеньев механизма, если lOA = 0,2 м, lAB = 0,45 м, lBC = 0,5 м, lCD = 0,7 м, lDE = 0,8 м.
Решение. Скорость пальца А кривошипа
 =
20,944 м/с.
=
20,944 м/с.
Рис.
13.8
б
а


МЦС шатуна ΑΒ (точка PAB, рис. 13.8, б) находится на пересечении перпендикуляров к векторам скоростей точек А и B поэтому угловая скорость шатуна

Тогда скорость точки В
vB
=
 =
=
 0,5
0,5
 = 0,5 νA
=
10,472 м/с.
= 0,5 νA
=
10,472 м/с.
Теперь можно найти угловую скорость коромысла CD и скорость точки D:
 =
vB
/
=
vB
/
 =
10,472
/ 0,5 = 20,944 с"1;
=
10,472
/ 0,5 = 20,944 с"1;
vD
=
 =
20,944 0,7 = 14,661 м/с.
=
20,944 0,7 = 14,661 м/с.
МЦС шатуна DE (точка PDE, рис. 13.8, б) находится на пересечении перпендикуляров к векторам скоростей точек D и Е, т. е. на пересечении продолжения отрезка DC и перпендикуляра к направляющей ползуна Е. Полученный треугольник DEPDE -равнобедренный, PDEE = DE.
По теореме о проекциях скоростей имеем
vE cos 30° = vD cos 60°,
откуда vE = vD tg 30° = 14,661 tg 30° = 8,464 м/с.
Угловая скорость шатуна DE
 =
vE
/PDEE
=
vE
/
=
vE
/PDEE
=
vE
/
 =
8,464 / 0,8 = 10,58 c
-1.
=
8,464 / 0,8 = 10,58 c
-1.
Угловая скорость ползуна Ε равна нулю.
Ответ: νΒ 10,47 м/с; vD 14,66 м/с; vE 8,46 м/с;
 40,31 с -1;
20,94 с -1;
=
10,58 с -1.
40,31 с -1;
20,94 с -1;
=
10,58 с -1.
13.9. Кривошип OA механизма шоковой дробилки вращается с частотой n = 300 мин -1 (рис. 13.9, а). Для положения, изображенного на рисунке, определить скорости точек В и D, а также угловые скорости всех ведомых звеньев механизма, если lOA =
= 0,12 м, lAB = 0,25 м, lBC = 0,3м, lBD = 0,35 м, lDE = 0,8м.
Рис.
13.9
б
a


Решение. Скорость пальца А кривошипа
 =
3,77 м/с.
=
3,77 м/с.
Траектория точки А - окружность радиусом OA, траектории точек В и D - дуги окружностей, радиусы которых соответственно СВ и ED (рис. 13.9, б). Векторы скоростей этих точек, касательные к соответствующим траекториям, показаны на рисунке. Восставив перпендикуляры из рассматриваемых точек к векторам их скоростей, находим МЦС шатунов АВ и BD (соответственно точки РAB и PBD на рис. 13.9, б).
Для определения скоростей vB и vD применим теорему о проекциях скоростей:
vA cos 60° = vB cos 30° и vD cos 0° = vB cos 30°,
откуда
vB= vA tg 30° = 3,77 tg 30° = 2,177 м/с;
vD = vA cos 60° = 3,77 cos 60° = 1,885 м/с.
Угловые скорости ведомых звеньев находим с помощью МЦС, предварительно из равнобедренного треугольника АВРAB и прямоугольного треугольника BDPBD определив полюсные расстояния:
РABВ = и PBDВ = 2 lBD .
Тогда




Ответ:
vB
2,18
м/с; vD
=
1,885 м/с;
8,71
 ;
;
 7,26
;
7,26
;
 3,11 с"1;
3,14 с-1.
3,11 с"1;
3,14 с-1.
13.10. Кривошип OA механизма грохота (рис. 13.10, а) вращается с частотой n = 1500 мин . Для положения, показанного на рисунке, определить скорости точек В, D и Е, а также угловые скорости всех ведомых звеньев механизма, если = 0,15 м, = =0,08 м, lBD = 0,36 м, = 0,25 м.
а
б

Рис.
13.10
Решение. Скорость пальца А кривошипа
 =
23,562 м/с.
=
23,562 м/с.
Траектория точки А - окружность радиусом OA, траектории точек В и D - дуги окружностей, радиусы которых соответственно СВ и СД траектория точки С - отрезок горизонтальной прямой линии. Векторы скоростей этих точек, касательные к соответствующим траекториям, показаны на рис. 13.10, б. Восставив перпендикуляры из рассматриваемых точек к векторам их скоростей, находим МЦС шатуна DE (точка РDE) и убеждаемся, что МЦС шатуна АВ находится в бесконечности, т.е. этот шатун в данный момент движется мгновенно поступательно, его угловая скорость = 0, а скорости точек А и В одинаковы.
Поскольку при вращательном движении тела скорости его точек прямо пропорциональны радиусам их траекторий, скорость vd точки D коромысла CD

Для определения скорости vE точки Ε шатуна DE применим теорему о проекциях скоростей:
vE cos 15o = vD cos30o,
откуда
νE = vD cos 30° / cos 15° = 129,591 cos 30° / cos 15° = 116,188 м/с.
Угловая скорость коромысла CD, совершающего вращательное движение,
= vB / lBC = 23,562 / 0,08 = 294,525 с-1.
Угловую скорость шатуна DE находим с помощью МЦС, предварительно из треугольника DEPDE определив по теореме синусов полюсное расстояние РDEЕ = lDE sin 60° / sin 15°.
Тогда
= vE /PDEE = (νE sin 15°) / (lDE sin 60°) =
= (116,188 sin 15°) / (0,25 sin 60°) = 138,895 с -1.
Угловая скорость ползуна Ε равна нулю.
Ответ: νΒ = νΑ 23,56 м/с; vD 129,6 м/с; vE 116,2 м/с;
= = 0; 294,5 с -1; 138,9 с -1.
13.13. При срабатывании предохранительной планетарной муфты (рис. 13.13, а) роторного экскаватора наружное (коронное) колесо 1 начинает вращаться из состояния покоя с постоянным угловым ускорением ε. Ведущее (солнечное) колесо 2 вращается равномерно с угловой скоростью ω. Известно отношение чисел зубьев колес 3 и 2: z3 / z2 = i. Определить угловое замедление водила OA и время движения колеса 1 до остановки водила.
a
б
в
г
Рис.
13.13


Решение. На рис. 13,13, б, в, г показаны картины распределения скоростей точек механизма, расположенных в вертикальном радиальном его сечении, для момента начала движения наружного (коронного) колеса 1 (схема «б»), промежуточного положения (схема «в») и момента остановки водила (схема «г»). Из этих рисунков видно, что скорость центра А сателлита 3, равная окружной скорости водила OA, равна половине геометрической суммы скоростей крайних точек вертикального сечения сателлита:

где ν2 - окружная скорость солнечного колеса 2 (ν2 = ωr2); r2 - радиус его начальной окружности; ν1 - окружная скорость коронного колеса 1 (ν1 = ω1 r1; ω1 - его угловая скорость; r1 - радиус начальной окружности короны (r1 = r2 + 2 r3); r3 - радиус начальной окружности сателлита 3. Поскольку радиусы начальных окружностей зубчатых колес прямо пропорциональны числам зубьев, то r3 / r2 = z3 / z2 = i, откуда r3 = r2 i.
Угловая скорость водила


Дифференцируя по времени с учетом ω = const, имеем

Направление углового ускорения OA водила совпадает с направлением углового ускорения ε коронного колеса, т. е. противоположно направлению вращения водила. Следовательно, вращение водила является равнозамедленным и до полной его остановки происходит по закону

Начальное
значение
 угловой скорости водила находим по
формуле (1) при условии, что
угловой скорости водила находим по
формуле (1) при условии, что
 =
0:
=
0:
= ω/[2(1 + i)].
Тогда

Моменту
остановки водила соответствует
 =
0, т. е.
=
0, т. е.
 =
0, или
t
= ω/
[ε
(1 + 2 i)].
=
0, или
t
= ω/
[ε
(1 + 2 i)].
Ответ:
 =
ε
(1
+ 2 ί)/
[2
(1 + i)];
t
= ω/
[ε
(1 + 2 i)].
=
ε
(1
+ 2 ί)/
[2
(1 + i)];
t
= ω/
[ε
(1 + 2 i)].
13.14. Система, состоящая из стержня АВ, шарнирно соединенного с ползунами А и В (рис. 13.14, а), является моделью шахтной вагонетки: ползуны - передняя и задняя колесные пары, стержень - кузов вагонетки. Определить угловое ускорение кузова, а также ускорение его центра тяжести С в тот момент времени, когда передняя колесная пара, двигаясь равномерно со скоростью ν, въезжает на закругление радиусом R. Известно расстояние lAB = l; lFC = lBC .
в
а
б
Рис.
13.14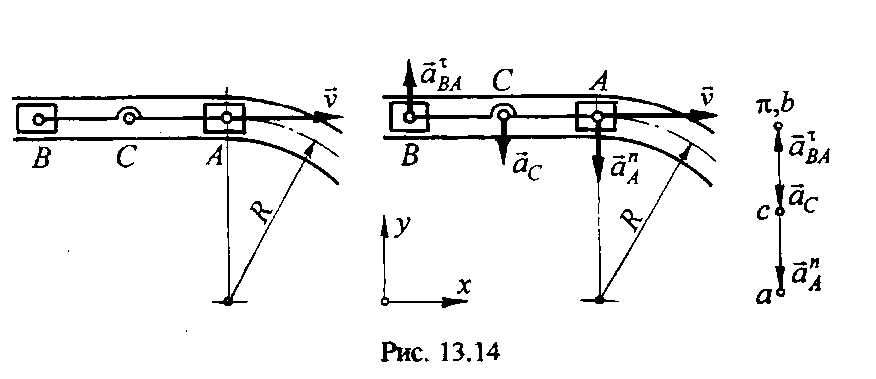
Решение.
Векторы
скоростей
 ,
и
соответственно
точек А,
В и
С
(рис.
13.14, б) в рассматриваемый момент времени
расположены на прямой АВ
(и
ее продолжении), поэтому согласно теореме
о проекциях скоростей
,
и
соответственно
точек А,
В и
С
(рис.
13.14, б) в рассматриваемый момент времени
расположены на прямой АВ
(и
ее продолжении), поэтому согласно теореме
о проекциях скоростей
vA = vB = vC = v.
Угловая скорость стержня = 0, так как МЦС находится в бесконечности (перпендикуляры к векторам скоростей параллельны друг другу).
Принимаем точку А за полюс, тогда ускорение точки В [см. уравнение (13.2) в начале данной главы

где аB - ускорение точки В; поскольку движение этой точки прямолинейное и равномерное, то аB = 0;
 -
нормальное ускорение точки A
(
=
ν2
/R);
-
нормальное ускорение точки A
(
=
ν2
/R);
 -
тангенциальное ускорение точки А
(
=dv/dt);
-
тангенциальное ускорение точки А
(
=dv/dt);
по условию задачи ν = const, следовательно, = 0;
 нормальное
ускорение точки В
при
вращении стержня
нормальное
ускорение точки В
при
вращении стержня
АВ
вокруг
полюса Α
( =
=
 );
b
рассматриваемый
);
b
рассматриваемый
момент
времени
= 0,
поэтому
 =0;
=0;
 тангенциальное
ускорение точки В
при
вращательном
тангенциальное
ускорение точки В
при
вращательном
движении
стержня вокруг полюса А
( =
=
 )
)
 подлежащее
определению угловое ускорение стержня.
подлежащее
определению угловое ускорение стержня.
После подстановки известных величин получаем

Проецируем полученное векторное уравнение на ось у:

откуда = .
Тогда
 .
.
Для
определения ускорения
 точки
С составляем векторное уравнение,
аналогичное векторному уравнению для
определения ускорения
:
точки
С составляем векторное уравнение,
аналогичное векторному уравнению для
определения ускорения
:

Проецируем полученное векторное уравнение на оси x и у:
 ;
;

Но
 ,
следовательно,
,
следовательно,
 и
аC
= |aCy|
=
/2
= v2/(2R).
и
аC
= |aCy|
=
/2
= v2/(2R).
Ответ:
 =
=
 ;
аC
= v2/(2R).
;
аC
= v2/(2R).
13.15. При разгрузке скип 1 карьерного канатного подъема роликом В опирается на разгрузочную кривую, имеющую форму
дуги окружности радиусом R = 1 м, и поворачивается относительно рамы 2 вокруг шарнира А (рис. 13.15, а). Для положения, показанного на рисунке, определить угловую скорость и угловое ускорение скипа, если скорость рамы ν = 2 м/с; ее замедление
а =
0,8
м/с2;
 2,2
м.
2,2
м.
Рис.
13.15, а, б
б
a


Решение.
Рама скипа движется поступательно,
следовательно, скорость шарнира А,
установленного
на раме,
=
 ,
его
замедление
=
,
его
замедление
=
 Скорость
ролика
В,
принимаемого
за точку, направлена по касательной
к траектории его движения, т. е. к
разгрузочной кривой (рис. 13.15, б).
Точка P1
пересечения перпендикуляров,
восставленных в точках А
и
В
к
векторам
и
,
является
мгновенным центром скоростей скипа.
Полюсное расстояние
P1А
находим
из треугольника АВP1
с
помощью теоремы синусов:
Скорость
ролика
В,
принимаемого
за точку, направлена по касательной
к траектории его движения, т. е. к
разгрузочной кривой (рис. 13.15, б).
Точка P1
пересечения перпендикуляров,
восставленных в точках А
и
В
к
векторам
и
,
является
мгновенным центром скоростей скипа.
Полюсное расстояние
P1А
находим
из треугольника АВP1
с
помощью теоремы синусов:
P1А = ( sin 105°)/sin 45°.
Угловая скорость скипа
ω = νΑ / P1А = (ν sin 45°) / ( sin 105°) =
= (2 sin 45°) / (2,2 sin 105°) = 0,666 c -1.
Скорость точки В определяем, используя теорему о проекции скоростей:
vB cos 15° = νΑ cos 60°,
откуда

Чтобы найти угловое ускорение скипа, надо вычислить тангенциальное ускорение из уравнения
 +
+ =
+
=
+
 +
+
 ,
(1)
,
(1)
полученного из уравнения (13.2) с учетом того, что точка B совершает криволинейное движение, поэтому ее полное ускорение состоит из нормального и тангенциального.
Нормальные ускорения:
 м/с ;
м/с ;
 =
=
 ∙
2,2 = 0,976 м/
∙
2,2 = 0,976 м/ .
.



Рис.
13.15, в
Графическое
решение уравнения (1), называемое планом
ускорения,
показано на рис. 13.15, в. Чтобы
определить
аналитически, нужно спроецировать
уравнение (1) на ось
откуда




 ,
перпендикулярную второму неизвестному,
т.е. тангенциальному ускорению
:
,
перпендикулярную второму неизвестному,
т.е. тангенциальному ускорению
: =
=
 cos
cos
 sin
sin
 +
+
 cos
,
cos
,
=
(1,071
0,8
cos
+ 0,976 sin
)
/ cos
= 0,785 м/
. Угловое
ускорение скипа ε
=
/
= 0,785 / 2,2 = 0,357
Ответ

 =
(
=
(
 cos
cos
 +
sin
)
/ cos
=
+
sin
)
/ cos
=
 𝜔
𝜔 ≈
0,67
≈
0,67
 ε
≈ 0,36
ε
≈ 0,36
 .
.









 13.16. Для
положения, показанного на рис. 13.16, а,
определить угловую скорость и угловое
ускорение скипа AB,
а также ускорение
B,
если
=1,2
м/
,
=0,6
м/
,
=
2,3 м, R=
3
м, радиус
колеса r
= 0,25 м.
13.16. Для
положения, показанного на рис. 13.16, а,
определить угловую скорость и угловое
ускорение скипа AB,
а также ускорение
B,
если
=1,2
м/
,
=0,6
м/
,
=
2,3 м, R=
3
м, радиус
колеса r
= 0,25 м.
а б
A


R







Рис. 13.16, а,б
Решение.
Предварительно
уточним значение
,
которое
соответствует
заданным на рис. 13.16, а
значениям
углов. В четырехугольнике АВОС
(рис. 13.16, б)
угол ОСА -
прямой, ОС
= = ОВ
- R
+ r.
Треугольник
ОВС -
равносторонний.
![]() ACB
= 30°. Из
треугольника АСВ
по теореме
синусов получаем
ACB
= 30°. Из
треугольника АСВ
по теореме
синусов получаем
 =
(R+r)
=
(R+r) =
(3+0.25)
=
2.298 м.
=
(3+0.25)
=
2.298 м.
Отклонение от заданной величины не превышает 0,1 %, что вполне допустимо, но тем не менее в дальнейших расчетах мы будем использовать вновь найденное значение .
Скорость точки В определяем с помощью теоремы о проекциях скоростей на прямую АВ:
vB cos 15° = vA cos 45°,
откуда
vB = (vA cos 45°) / cos 15° = (1,2 cos 45°) / cos 15° = 0,878 м/с.
МЦС
 рамы АВ
скипа – это
точка пересечения перпендикуляров,
восставленных из точек А
и В
к векторам
A
и
B
(рис. И 16, б).
Полюсное
расстояние
рамы АВ
скипа – это
точка пересечения перпендикуляров,
восставленных из точек А
и В
к векторам
A
и
B
(рис. И 16, б).
Полюсное
расстояние
 находим из
треугольника
находим из
треугольника
 по теореме
синусов:
по теореме
синусов:
= sin 75°) / sin 60° = (2,298 sin 75°) / sin 60° = 2,563 м.
Угловая скорость скипа
𝜔 = vA / = 1,2 / 2,563 = 0,468 .
Чтобы найти угловое ускорение скипа, надо вычислить тангенциальное ускорение из уравнения
+ = + + (1)
полученного из уравнения (13.2) с учетом того, что точка В совершает криволинейное движение, поэтому ее полное ускорение состоит из нормального и тангенциального. Нормальные ускорения:
=
 /
(R
+ r)
= 0,8782
/ (3 + 0,25) = 0,237 м/с2;
/
(R
+ r)
= 0,8782
/ (3 + 0,25) = 0,237 м/с2;

 =
=
 = 0,4682
∙ 2,298 = 0,504 м/с2.
= 0,4682
∙ 2,298 = 0,504 м/с2.
Графическое решение уравнения (1), называемое планом ускорений, показано на рис. 13.16, е.
Выбрав направления осей координат так, как указано на рис.13.16, в, проецируем уравнение (1) на эти оси:
Рис. 13.16, в
sin 15° + cos 15° = аА sin 45° + ;
cos 15° - sin 15° = аА cos 45° - ,
откуда
= (аА sin 45° + - sin 15°) / cos 15° =
= (0,6sin 45° + 0,504 - 0,237sin 15°)/cosl5° = 0,897 м/с2;
= - cos l5° + sinl5o + аА cos45o =
= - 0,237 cos 15° + 0,897sin 15° + 0,6 cos 45° = 0,427 м/с2.
Полное ускорение точки В:
аА
=
 =
д/о,2372+0,8972
=
0,928 м/с2.
=
д/о,2372+0,8972
=
0,928 м/с2.
Угловое ускорение скипа
ε = / = 0,427 / 2,298 = 0,186 .
Ответ: 𝜔
≈ 0;47 с-1;
ε
≈
0,19
 ;
аB
≈
0,93 м/с2.
;
аB
≈
0,93 м/с2.
13.17. Механизм
грохота состоит из кривошипа I,
вращающегося равномерно вокруг
центра О с
частотой
 = 120
,
шатуна 2 и
сита 3,
подвешенного
на параллельных стержнях 4
и 5,
шарнирно
прикрепленных к стойке 6
(рис. 13.17, а).
Известно, что
=
0,2
м,
= 0,8
м,
= 120
,
шатуна 2 и
сита 3,
подвешенного
на параллельных стержнях 4
и 5,
шарнирно
прикрепленных к стойке 6
(рис. 13.17, а).
Известно, что
=
0,2
м,
= 0,8
м,
 =
=
 = 0,5
м. Для заданного положения
механизма определить скорость и ускорение
сита, а также угловые
скорости и угловые ускорения звеньев
2
и
4.
= 0,5
м. Для заданного положения
механизма определить скорость и ускорение
сита, а также угловые
скорости и угловые ускорения звеньев
2
и
4.


Решение. При решении данной задачи используем метод планов скоростей и ускорений.


Рис. 13.17,6
Траектория пальца А кривошипа - окружность радиусом ОА ( рис 13. 17, б). Скорость пальца
vA
=
 =
(
=
( / 30)
=
(
∙ 120
/ 30) 0,2 = 2,513 м/с.
/ 30)
=
(
∙ 120
/ 30) 0,2 = 2,513 м/с.
Траектории
точек В
и
Е
- одинаковые
дуги окружностей (их радиусы
 и
равны
по условию задачи). Следовательно,
A
и
равны
по условию задачи). Следовательно,
A
![]() OA;
B
ВС;
E
DE;
B
||
E
(так как
стержни 4 и
5 параллельны).
OA;
B
ВС;
E
DE;
B
||
E
(так как
стержни 4 и
5 параллельны).
Принимая за полюс точку А, записываем векторное уравнение скорости точки В:
B
=
A BA
(1)
BA
(1)
Скорость точки А известна по величине и направлению, известны также линии действия векторов B и BA ( BA AB, см. пояснения в начале главы). Таким образом, в уравнении (1) имеются только две неизвестные величины модули скоростей B и BA
в


Рис. 13. 17, в, г
Для графического
решения этого уравнения из произвольно
выбранной точки pv
,
называемой
в дальнейшем полюсом
плана
скоростей,
откладываем
вектор
 ,
изображающий
в некотором
масштабе
,
изображающий
в некотором
масштабе
 [(м/с)/мм]
скорость точки А
(рис.
13.17, в). Заметим,
что
↑↑
A
и pv
a
= vA
/
.
Поскольку в соответствии с уравнением
(1) к вектору
A
следует
прибавить вектор
BA,
то из конца
вектора
проводим
луч, параллельный линии действия вектора
BA
до пересечения с лучом
[(м/с)/мм]
скорость точки А
(рис.
13.17, в). Заметим,
что
↑↑
A
и pv
a
= vA
/
.
Поскольку в соответствии с уравнением
(1) к вектору
A
следует
прибавить вектор
BA,
то из конца
вектора
проводим
луч, параллельный линии действия вектора
BA
до пересечения с лучом
 ,
проведенным
из полюса pv
параллельно
линии действия вектора
B.
Полученная
фигура (в данном случае - треугольник
pv
ab)
называется планом
скоростей
звена АВ. Совокупность
планов скоростей всех звеньев
механизма, построенная из одного полюса
,
,
проведенным
из полюса pv
параллельно
линии действия вектора
B.
Полученная
фигура (в данном случае - треугольник
pv
ab)
называется планом
скоростей
звена АВ. Совокупность
планов скоростей всех звеньев
механизма, построенная из одного полюса
,
носит название плана скоростей механизма. Отметим, что на плане скоростей векторы абсолютных скоростей точек имеют своим началом полюс плана, а векторы относительных скоростей соединяют на плане концы векторов абсолютных скоростей соответствующих точек.
Из
плана скоростей следует, что vB
=
(pvb)
и
vBA
=
(ab).
Принимая
во внимание, что треугольник
 b
-
равносторонний, так как каждый его
угол равен 60°, получаем
b
-
равносторонний, так как каждый его
угол равен 60°, получаем
 a=
a= b=
ab,
или
vA
= vB
=
vBA
=
2,513 м/с.
b=
ab,
или
vA
= vB
=
vBA
=
2,513 м/с.
Векторное уравнение скорости точки Е, отнесенной к ситу 3:
E= B + EB. (2)
Для
решения этого уравнения проводим из
точки b
плана
скоростей луч, перпендикулярный BE,
поскольку
EB
BE,
а
из полюса ру
- луч,
перпендикулярный DE
(параллельный
линии действия скорости
E).
Эти лучи пересеклись в точке b,
следовательно,
точка е
совпала
с точкой b,
поэтому
pve=pvb,
be
=
0, т. е.
E
=
B,
vEB
=0,
= vEB
/
 =
0,
сито 3
движется
поступательно и v3
= vB.
=
0,
сито 3
движется
поступательно и v3
= vB.
Угловые скорости остальных ведомых звеньев:
= vBA / = 2,513 /0,8 = 3,141 с-1;
= = vB/ = 2,513 / 0,5 = 5,026 .
Переходим к определению ускорений.
Поскольку
кривошип OA
вращается
равномерно, ускорение
его
пальца А
равно
нормальному ускорению

 =
= =2,5132
/
0,2
= 31,576 м/с2.
=2,5132
/
0,2
= 31,576 м/с2.
Для точки В, принадлежащей шатуну АВ,
= + = + + (3)
где вектор направлен вдоль ВС к центру С; вектор ВС; вектор направлен вдоль ВА к центру А; вектор АВ.
Находим величины нормальных ускорений:
= =
=
 =
12,63 м/с2;
=
12,63 м/с2;
= =
3,1412
0,8
= 7,893 м/с2.
=
3,1412
0,8
= 7,893 м/с2.
Графическое решение уравнения (3) показано на рис. 13.17, г. Выбрав направления осей координат так, чтобы ось x была параллельна шатуну АВ, проецируем уравнение (3) на эти оси:
sin 30° + = cos 30° = аА sin 30° + ;
cos 30° - sin 30° = - аА cos 30° + ,
откуда
= (аА sin30° + - sin30°) / cos30° =
= (31,576 sin 30° + 7,893 -12,63 sin 30°) / cos 30° = 20,053 м/с2;
= (аА + ) cos 30° - sin 30° =
= (31,576 +12,63) cos 30° - 20,053 sin 30° = 28,257 м/с2.
Полное ускорение точки В
АB
=
= = 23,69 м/с2.
= 23,69 м/с2.
Ускорение точки Е
 .
(4)
.
(4)
Но
=
0, поэтому
 =
0;
4
=
и
=
, следовательно,
=
0;
4
=
и
=
, следовательно,
 =
;
кроме
того,
=
;
кроме
того,
 ||
.
Решая
уравнение (4) с учетом указанных
условий, для чего достаточно его
спроецировать на горизонтальную ось,
получаем
||
.
Решая
уравнение (4) с учетом указанных
условий, для чего достаточно его
спроецировать на горизонтальную ось,
получаем =
и
=
0, это значит, что
=
и
=
0, это значит, что
 = 0, т. е. сито движется поступательно (а
не мгновенно поступательно) и его
ускорение
= 0, т. е. сито движется поступательно (а
не мгновенно поступательно) и его
ускорение
 =
= =
= 23,69 м/с2.
Угловые ускорения звеньев 2
и
4:
=
= 23,69 м/с2.
Угловые ускорения звеньев 2
и
4:
= / = 28,257 / 0,8 = 35,321 ;
 =
/
=
20,053 / 0,5 = 40,106
.
=
/
=
20,053 / 0,5 = 40,106
.
Ответ:
v3
=
≈
2,51 м/с;
=
=
23,69 м/с2.
 3,14
.
3,14
.
≈ 35,321 ; 4 ≈ 5,03 ; 40,11 .
13.18.
Кривошип OA
механизма
щековой дробилки вращается с частотой
n
=
300 ми .
Для положения, изображенного на рис.
13.18, а,
определить
угловую скорость и угловое ускорение
щеки АВ
и
ускорение точки В,
если
= 1,0 м,
=
0,012 м,
=
0,45 м.
.
Для положения, изображенного на рис.
13.18, а,
определить
угловую скорость и угловое ускорение
щеки АВ
и
ускорение точки В,
если
= 1,0 м,
=
0,012 м,
=
0,45 м.
a б в



Решение. Скорость пальца А кривошипа
vA
=
OA
=
 =
=
 = 0,377 м/с.
= 0,377 м/с.
30
Траектория
точки А
- окружность
радиусом OA,
траектория
точки
В
-
дуга окружности радиусом СВ.
Векторы
скоростей этих точек,
касательные
к соответствующим траекториям, показаны
на рис.
13.18, б.
Восставив
перпендикуляры из рассматриваемых
точек к векторам их скоростей, находим
МЦС щеки А
В (точка
 ).
Для
определения скорости vBA
точки
В
относим
последнюю к щеке АВ
и
применяем теорему о проекциях скоростей:
).
Для
определения скорости vBA
точки
В
относим
последнюю к щеке АВ
и
применяем теорему о проекциях скоростей:
vA cos 70° = vB cos 45°,
откуда
vB = vA cos 70° / cos 45° = 0,377 cos 70° / cos 45° = 0,182 м/с.
Угловую
скорость щеки АВ
находим
с помощью МЦС, предварительно из
треугольника АВ определив
по теореме синусов
полюсное расстояние
В
=
sin
20° / sin
115°.
определив
по теореме синусов
полюсное расстояние
В
=
sin
20° / sin
115°.
Тогда
OA = vB / B = (vB sin 115°) / ( sin 20°) =
= (0,182 sin 115°) / (1,0 sin 20°) = 0,483 .
Поскольку кривошип OA вращается равномерно, ускорение его пальца А равно нормальному ускорению , причем
= /
=
0,3772
/ 0,012 = 11,844 м/с2.
/
=
0,3772
/ 0,012 = 11,844 м/с2.
Для точки В, принадлежащей щеке АВ,
 (1)
(1)
где вектор направлен вдоль ВС к центру С; вектор ВС; вектор направлен вдоль ВА к центру А; вектор АВ.
Находим величины нормальных ускорений:
= / = 0,1822 / 0,45 = 0,074 м/с2;
=
 =
0,4832
1,0 = 0,233 м/с2.
=
0,4832
1,0 = 0,233 м/с2.
Графическое решение уравнения (1), т. е. план ускорений механизма, показано на рис. 13.18, е.
Выбрав
направления осей координат так, чтобы
ось
 была
перпендикулярна вектору
(рис.
13.18, е),
проецируем
уравнение (1) на эти оси:
была
перпендикулярна вектору
(рис.
13.18, е),
проецируем
уравнение (1) на эти оси:
= cos 25° - sin 45° + cos 45°;
= - sin 25° + cos 45° + sin 45°;
Откуда
= ( + sin 25° - cos 45°)/ sin 45° =
(0,074 +11,844 sin 25° - 0,233 cos 45°) / sin 45° = 6,95 м/с2;
= cos 25° - sin 45° + + cos 45° =
= -11,844 cos 25° - 0,233 sin 45° + 6,95 cos 45° = 15,484 м/с2.
Полное ускорение точки B
=
=
 15,484
м/с2.
15,484
м/с2.
Угловое ускорение щеки:
= / = 6,95 / 1,0 = 6,95 .
Ответ: AB 0,48 с-1; = 6,95 ; = 15,48 м/с2.
1 3.19.
Кривошип OA
механизма шагания экскаватора-драглайна
(рис. 13.19, а) вращается с частотой n
= 3 мин-1.
Для положения, показанного на рисунке,
определить скорость и ускорение точки
С
лыжи, а также угловую скорость и угловое
ускорение звена АВ,
если
=
2,0 м,
=
0,5 м,
3.19.
Кривошип OA
механизма шагания экскаватора-драглайна
(рис. 13.19, а) вращается с частотой n
= 3 мин-1.
Для положения, показанного на рисунке,
определить скорость и ускорение точки
С
лыжи, а также угловую скорость и угловое
ускорение звена АВ,
если
=
2,0 м,
=
0,5 м,
 =
1,2 м,
=
1,75 м.
=
1,2 м,
=
1,75 м.
Решение. Скорость пальца А кривошипа
vA
=
OA
= =
= 0.157
м/с.
=
= 0.157
м/с.
Траектория точки А — дуга окружности радиусом OA, Траектория точки В - дуга окружности радиусом BD. Векторы скоростей этих точек, касательные к соответствующим траекториям, показаны на рис. 13.19, б. Восставив перпендикуляры из рассматриваемых точек к векторам их скоростей, находим МЦС звена АВ
(точка ) .Для определения скорости vB точки В относим последнюю к звену АВ и применяем теорему о проекциях скоростей:
vA cos 0° = vB cos 45°, откуда
vB = (vA cos 0°) / cos 45° = (0,157 cos 0°) / cos 45° = 0,222 м/с.
Угловую
скорость звена АВ
находим
с помощью МЦС, предварительно
из равнобедренного прямоугольного
треугольника АВРAB
определив
полюсное расстояние РAB
А
=
 АВ.
АВ.
Тогда
AB = vA / РAB А = vA / АВ = 0,157 / 2 = 0,0785 с -1.
Полюсное расстояние точки С определяем из треугольника АСРAB по теореме косинусов:
РABС
 =
=
=
 =
2,8м.
=
2,8м.
Скорость точки С: vC = ( AB (РАB С) = 0,0785 2,8 0,21 м/с. Поскольку кривошип ОА вращается равномерно, ускорение А его пальца А равно нормальному ускорению аАО. причем
= / OА = 0,1572/0,5 = 0,049 м/с2.
Для точки В, принадлежащей звену АВ,
 ,
(1)
,
(1)
где вектор направлен вдоль ВD к центру D; вектор ВD; вектор направлен вдоль ВА к центру А; вектор АВ.
Находим величины нормальных ускорений:
= / BD = 0,222 2 / 1,75 = 0,028 м/с2;
= AB
=
0,07852
2 = 0,012 м/с2.
AB
=
0,07852
2 = 0,012 м/с2.
Графическое решение уравнения (1), т. е. план ускорений звена АВ, показано на рис. 13.19, е. Выбрав координатные оси так, чтобы ось была горизонтальна (рис. 13.19, в), проецируем уравнение (1) на эти оси:
cos45° + sin45°= аА - ;
- sin45° + cos45° = - ,
откуда
= (- + sin 45°) / cos 45° =
= (-0,012 + 0,028 sin 45°)/ cos 45° = 0,011м/с2;
= - cos45° - sin45° + aA =
= - 0,028 cos 45° - 0,011 sin 45° + 0,049 = 0,021 м/с2.
Угловое ускорение звена АВ:
= AB
=0,021
/ 2
0,011c-2.
AB
=0,021
/ 2
0,011c-2.
Ускорение точки С
 (2)
(2)
где
вектор
 направлен
вдоль СА
к
центру A,
направлен
вдоль СА
к
центру A,
 =
AB
=
=
AB
=
= 0,07852
1,2
= 0,074 м/с2;
вектор
 АС,
АС,
 =
AC
=
=
AC
=
= 0,011 1,2 = 0,013 м/с2.
Проецируя уравнение (2) на оси координат и подставляя найденные величины, получаем
 =
+
sin
30° +
cos30°
=
=
+
sin
30° +
cos30°
=
= 0,049 + 0,0074 sin 30° + 0,013 cos 30° = 0,064 м/с2;
 =
cos
30° -
sin
30° =
=
cos
30° -
sin
30° =
= 0,0074cos30° - 0,013 sin 30° = -0,0001 м/с2.
Полное ускорение точки С:
 C
=
C
=
 =
= ≈0,064
м/с2.
≈0,064
м/с2.
Ответ: vc ≈ 0,21 м/с; ас ≈ 0,064 м/с ;
AB
≈
0,08с-1;
 0,011
с-2.
0,011
с-2.
13.20. При выдвижении стрелы роторного экскаватора точка А движется равномерно со скоростью vA = 0,3 м/с, точка С каната ВС неподвижна (рис. 13.20, а). Определить угловую скорость и угловое ускорение стрелы для указанного на рисунке положения, если 1= 60 м, 2 = 25 м.

Рис. 13.20
Решение. Траектория точки В - дуга окружности радиусом ВС. Стрела АВ совершает плоскопараллельное движение. Принимаем точку А, скорость vA которой задана, за полюс, тогда векторное уравнение скорости точки В имеет вид
B
 A+
BA
,
A+
BA
,
где B ВС, a BA AB.
Графическое решение этого уравнения (план скоростей механизма) представляет собой равносторонний треугольник pvab (рис. 13.20, б), поэтому vA = vB = vBA = 0,3 м/с.
Угловая скорость стрелы
AB
=
 =
=
 =
5
10
-3 с-1
.
=
5
10
-3 с-1
.
Поскольку точка А движется равномерно, то vA = const и аА = 0, поэтому векторное уравнение ускорения точки В, принадлежащей звену АВ, имеет достаточно простой вид:
 ,
(1)
,
(1)
где вектор нормального ускорения направлен вдоль ВС к центру С; вектор тангенциального ускорения ВС; вектор нормального ускорения направлен вдоль ВА к центру А; вектор тангенциального ускорения АВ.
Находим величины нормальных ускорений:
=
/
BD
= 0,32
/ 25 = 3,6
 -3
м/с2;
-3
м/с2;
= AB
=
0,32
/60 = 1,5
-3
м/с2;
AB
=
0,32
/60 = 1,5
-3
м/с2;
Графическое решение уравнения (1), т.е. план ускорений стрелы АВ, показано на рис. 13.20, е.
Выбрав координатные оси так, чтобы ось была параллельна продольной оси стрелы (рис. 13.20, в), проецируем уравнение (1) на эти оси:
cos 60° - sin 60° = ;
sin
60° +
cos
60° =
 ,
,
откуда
= (- + cos 60°) / sin 60° =
= (-1,5 10-3 + 3,6 10-3 cos 60°) / sin 60° = 3,464 10 - 4 м/с2;
= sin 60° + cos 60° =
= 3,6 10-3 sin 60° + 3,464 10 - 4 cos 60° = 3,291 10 - 3 м/с2.
Угловое ускорение стрелы:
= / AB =3,291 10-3/60 = 5,485 10- 5 с-2 .
Ответ: AB= 5 10-3 с-1; 5,5 10-5 с-2.
13.21. Кривошип OA механизма шагания экскаватора-драглайна (рис. 13.21, а) вращается с частотой n = 5 мин-1. Для положения, показанного на рисунке, определить ускорение точки В, а также угловую скорость и угловое ускорение звена ВС, если OA = 0,4 м, AB = 1,2 м, AC = 1,6 м.
 а
б
а
б

Рис 13.21 а,б
Решение. В рассматриваемом механизме точка А движется по дуге окружности радиусом OA, точка В - по так называемой шатунной кривой, а точка С - прямолинейно по вертикальной прямой ОС. Скорость пальца А кривошипа
30
vA
=
OA
=
=
 = 0.209 м/с.
= 0.209 м/с.
причем OA, т. е. вектор направлен вертикально вниз. Но и вектор скорости точки С тоже вертикален. Следовательно, МЦС звена ВАС находится в бесконечности, движение этого звена - мгновенно поступательное, его угловая скорость BC = 0 и = = .
Поскольку кривошип OA вращается равномерно, а угловая скорость шатуна АС равна нулю, то = 0, = 0 и ускорение отнесенной к шатуну прямолинейно движущейся точки С:
=
 +
,
+
,
где вектор направлен по прямой ОС, вектор - по прямой АО к центру О, вектор АС. Величина нормального ускорения
=
 =
0,2092
/ 0,4 = 0,109 м/с2.
=
0,2092
/ 0,4 = 0,109 м/с2.
Обозначим
угол наклона шатуна ВС
к
вертикали ОС
через
а,
тогда
sin
α
=
 =0,4
/ 1,6 = 0,25; α
14,48°;
cos
α
= 0,9682.
=0,4
/ 1,6 = 0,25; α
14,48°;
cos
α
= 0,9682.
Проецируя векторное уравнение ускорений на горизонтальную ось, получаем 0 = - cos а, откуда
= / cos α = 0,109 / 0,9682 = 0,113 м/с2.
Угловое ускорение шатуна ВС:
 =
=0,113
/ l,6
= 0,071c-2.
=
=0,113
/ l,6
= 0,071c-2.
Теперь можно определить ускорение точки В из уравнения
= + ,
для чего спроецируем
это уравнение на горизонтальную и
вертикальную координатные оси,
учитывая, что
AB
и
=
 =
0,071
1,2
0,085 м/с2:
=
0,071
1,2
0,085 м/с2:
 =
+
cos
α
= 0,109
+ 0,085
0,9682 = 0,191 м/с2;
=
+
cos
α
= 0,109
+ 0,085
0,9682 = 0,191 м/с2;
 =
= sin
α
=
-0,085
0,25 = - 0,021 м/с2.
sin
α
=
-0,085
0,25 = - 0,021 м/с2.
Полное ускорение точки В:
= =
=
 =
0,192 м/с2.
=
0,192 м/с2.
Для
наглядности на рис 13.21, б
показан
план ускорений механизма, представляющий
собой графическое решение уравнений
(1)
и
(2) в некотором масштабе μa
(
 )
)
Ответ: аB 0,19 м/с2 ; BC = 0; 0,07 с -2.
13.22. При повороте самосвала точка А прицепа движется равномерно с известной скоростью = , причем вектор образует с осью прицепа угол α, изменяющийся по закону α = kt, где k = const (рис. 13.22, а). Определить угловую скорость и угловое ускорение прицепа, а также ускорения точек А и
В, если известно, что скорость точки В в любом положении прицепа направлена по его продольной оси; АВ = .
Указание: радиус кривизны траектории точки В определяется по
формуле ρ =
 =
=

 =
=
 где
- угловая скорость прицепа.
где
- угловая скорость прицепа.
a б


Рис. 13.22
Решение. МЦС РAB прицепа находится на пересечении перпендикуляров, восставленных из точек А и В к векторам скоростей этих точек (рис. 13.22, б). Полюсное расстояние точки А
АРАВ= АВ / sin α = / sin kt.
Угловая скорость прицепа
=vA / APAB = v / ( / sin kt) = (v sin kt ) / ,
его угловое ускорение
= d / dt = = (kv cos kt) / l.
Точка А движется равномерно по некоторой кривой линии, следовательно, ускорение этой точки равно ее нормальному ускорению:
aA = =v2A / ρ A=v2/ ρ A.
Радиус ρ A кривизны траектории точки А находим по аналогии с радиусом кривизны траектории точки В (см. указание в
условии задачи), учитывая, что угол ψ между касательной в точке А к траектории этой точки и координатной осью Ох равен ψ = α + (см. рис. 13.22, б):
ρA
=
 =
=

 =
=
 =
=
 =
=

dt
Тогда aA = v ( k + ).
Ускорение aB точки В складывается из нормального ускорения = / ρB касательного (тангенциального) ускорения = dvB / dt.
Скорость vB точки В находим, используя теорему о проекциях скоростей:
vB = vA cos a = v cos kt.
Радиус ρB кривизны траектории точки В (в соответствии с указанием в условии задачи)
ρB
=
 =
=
 = l
ctg
kt.
= l
ctg
kt.
Ictgkt.
Рл =
=
 =
=
 ;
;
=
 B
=
-k
sin
kt.
B
=
-k
sin
kt.
Полное ускорение точки В
aB
=
 =
= =
=
=[( )/
]
)/
] .
.
Ответ: = ( sin kt) / ; = (kv cos kt) / ;
aA = (k + ); аB =[( sin kt) / ] .
13.24. В задаче 10.22 определить проекции скорости и ускорения точки В на оси Ох и Оу, применяя теорию плоскопараллельного движения.
 ешение.
В начальном положении (при β = 0)
стержень АВ вертикален,
точка М1
шестерни / совпадает
с точкой М2
неподвижного
колеса 2 (рис.
13.24).
ешение.
В начальном положении (при β = 0)
стержень АВ вертикален,
точка М1
шестерни / совпадает
с точкой М2
неподвижного
колеса 2 (рис.
13.24).
В некотором промежуточном положении точка Р - полюс зацепления шестерни 1 и колеса 2,
РМ1 = РМ2 , т.е. r1ψ = r2φ. Но r1 = z r; φ = t; r2 = r + r1 = r (1 + z), поэтому z r ψ = r (1 + z) t, откуда
ψ = (1 + z) t / z.
Угол поворота сателлита
Рис 13.34
β =
ψ
– φ =
 .
.
Угловая
скорость сателлита
 ,
его угловое ускорение
,
его угловое ускорение
 .
.
Скорость точки В:
A = B = BA,
где A OA, vA= r; BA AB, vBA = R = ( / z)R.
Проекции вектора vB на координатные оси:
vBx = vA cos φ + vBA cos β = [r cos t + (R / z) cos ( t / z)];
vBy = vA sin φ - vBA sin β = [r sin t - (R / z) sin ( t / z)];
Ускорение точки В
 ,
,
так как = 0 и = 0, поскольку = const и = const, т. е. = 0 и = 0.
Вектор
направлен
вдоль АО к
центру О;
=
 ; вектор
; вектор
направлен вдоль
BA
к центру А;
=
 R=
(
/ z)2
R.
R=
(
/ z)2
R.
Проекции вектора на координатные оси:
aBx
= -aA
sin
φ
- aBA
cos
β
=
 [r
sin
t
+
(R
/ z2)
sin (
t
/ z)];
[r
sin
t
+
(R
/ z2)
sin (
t
/ z)];
aBy = aA cos φ - aBA cos β = [r cos t - (R / z2) cos ( t / z)];
Ответ: vBx = [r cos t + (R / z) cos ( t / z)];
vBy [r sin t - (R / z) sin ( t / z)];
aBx
 [r
sin
t
+
(R
/ z2)
sin (
t
/ z)];
[r
sin
t
+
(R
/ z2)
sin (
t
/ z)];
aBy = [r cos t - (R / z2) cos ( t / z)];
////////////////////////////////////////////////////////////////////////////////