

Снятие эмх в режиме динамического торможения
Прежде чем приступить к снятию ЭМХ в режиме динамического торможения необходимо:
переключателем Q1 отключается ИД от сети переменного тока;
движками потенциометра RPLM3 останвливается МПТ М2 (контроль
по прибору Рω);
переключатель Q1 устанавливается в положение «ДТ»;
латром TV 2 по амперметру РА2 устанавливается величина постоянного тока (по заданию преподавателя).
Снятие характеристик в динамическом торможении начинают с частоты вращения, равной нулю.
Затем постепенно увеличивая напряжение на обмотке возбуждения LM3 потенциометром RPLM3, приводится в действие МПТ М2, а с ней и ИД.
Так как критическое скольжение ИД в режиме динамического торможения находится в зоне частот вращения близких нулю, то в зоне малых скоростей ИД интервал частот вращения должен быть минимальным.
В режиме динамического торможения но Рω и РА2 снимаются 7-8 показаний.
Если ИД работает в режиме динамического торможения, то МПТ М2 работает как двигатель, МЗ - как генератор, а АД - как двигатель.
Снятие кривой потерь мпт м2
(обоснование см. в следующем разделе)
Рукоятку переключателя Q1 перевести в положение «О». Потенциометром RPlm3 установить максимальную ЧВ МПТ М2, которая была получена в режиме рекуперативного торможения ИД. Снижая ЧВ МПТ М2 этим же потенциометром снимают показания приборов РАЗ и Рω до ЧВ, равной нулю (5-8 точек) (см. рис. 5). При изменении направления вращения МПТ М2 кривую потерь можно не снимать, помятуя о том, что в этом случае она является перевернутым зеркальным отображением первой зависимости относительно оси ω (см. рис. 5).
Методики расчета моментов ид
Для получения механических характеристик М = f(S) ИД необходимо произвести дополнительные расчеты и опыты, т.к. в эксперименте снимается электромеханическая характеристика ω = f(Iя) МПТ М2.
Электромагнитный момент М2 можно определить как
Мэл=С*Iя (16.0)
где С определяется по
С = Uн-Iн*Rя/ωн
Iя - ток якоря МПТ М2, А.
Момент па валу ИД
М = -(Мэл ± ΔМ) (17.0)
где ΔМ - момент потерь вращения МПТ М2.
Знак «-» относится к случаю, когда MПT M2 работает как двигатель и генератор, а «+» - в режиме противовключения.
Согласно (17.0) для определения момента на валу ИД необходимо к величине электромагнитного момента МПТ М2 прибавить (или отнять) момент, обусловленный механическими потерями и потерями в стали М2 и механическими потерями в ИД. С этой целью снимается, так называемая, кривая потерь, представляющая собой зависимость ЧВ от тока якоря МПТ М2 ω = f(Iя), получаемая при отключенном ИД (рис. 5).
Момент потерь ΔM выражается по (16.0).
Следует отметить, что эта кривая является разрывной и при изменении направления вращения МПТ М2 ток в якоре изменяет свой знак.
В связи с этим и кривая ω = f(Iя), МПТ М2 (рис. 5), как указывалось выше, тоже оказывается разрывной.
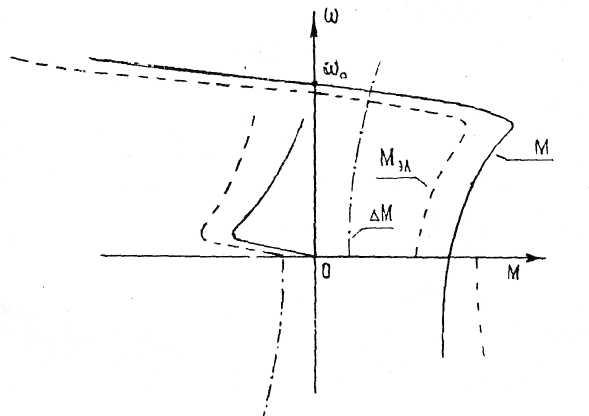
Рис. 5 Кривые ω = f1(Мэл), ω = f2(ΔМ), и MX ИД в двигательном и тормозных режимах.
На рис. 5 показаны отдельно ω = f(Mэл) пунктирными линиями, штрих-пунктиром - кривые ω = f(ΔIя), и результирующая кривая ω= f(M), представляющая собой MX ИД (сплошная линия).
Нужно иметь в виду, что правая часть (17.0) представляет собой алгебраическую сумму моментов.
В тех случаях, когда МПТ М2 работает в двигательном режиме, она покрывает потери в агрегате (ИД - М2); последнее, как указывалось, имеет место в режиме рекуперативного и динамического торможения ИД, а также торможения противовключением. В указанных трех случаях абсолютные значения момента ИД определяется исходя из (17.0) следующим образом
M = M- |ДМ| (17.1)
В случае двигательного режима ИД МПТ М2 работает генератором, следовательно, потери в агрегате покрываются самим ИД, поэтому момент его в данном случае находится по формуле:
M = Мэл +ΔМ (17.2)
Из Изложенного еще раз становится понятным, почему кривая ω= f(ΔI) является разрывной при переходе из двигательного режима в режим торможения противовключением.
Опытная искусственная ЭМХ приведена на рис.6.
Пересчет ИХ на ЕХ как ЭМХ, так и MX производится по формулам (при одинаковом скольжении на ИХ и ЕХ):
I1ех = I1их*(Uн/Uоп)2
Мех = Мих*(Uн/Uоп)2
где I1их, Мих - опытное значение тока статора и момента ИД, полученных при опытном значении напряжения.