

Краткое описание лабораторного стенда
MX ИД в двигательном режиме снимается опосредственным измерением параметров электромеханической характеристики ω = f(I,) нагрузочного устройства, в качестве которого используется МПТ М2 включенная по системе
Г-Д.
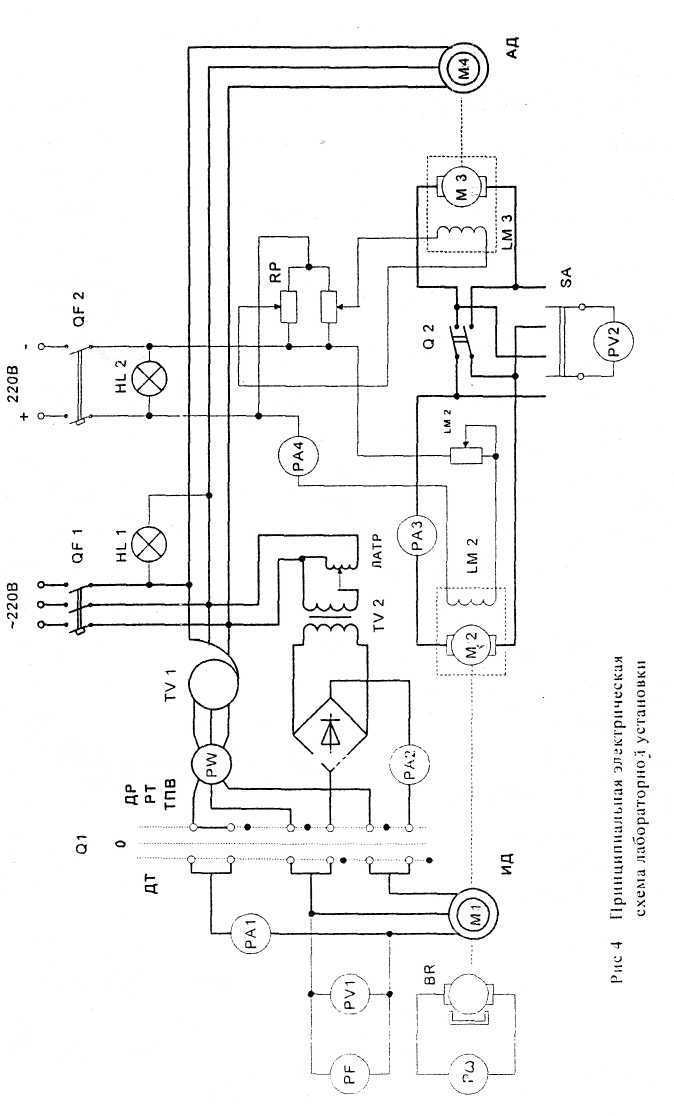
Принципиальная электрическая схема лабораторной установки приведена на рис.4.
В схеме на рис. 4 ИД Ml механически связан с нагрузочной МПТ М2 серии П-21. Питание ИД от сети переменного тока осуществляется через регулятор напряжения TV I типа РНТ-220-12 Uн. сети= l27/220 В, Uрегул.=0-220 В.
МПТ М2, имеющая независимое возбуждение, включается по схеме Г-Д с МПТ МЗ. МПТ МЗ приводится во вращение практически с постоянное) частотой вращения при помощи асинхронного двигателя (АД) М4.
Напряжение сети переменного и постоянного тока контролируется сигнальными лампами HLI и RL2. Вольтметр PV1 предназначен для измерения напряжения переменного тока на зажимах обмотки статора ИД, а вольтметр PV2 - для контроля величины и полярности ЭДС МПТ М2 и МЗ.
Для измерения тока в цепи якоря и возбуждения МПТ М2 установлены амперметры РАЗ и РЛ4. Измерение частоты вращения ИД Ml осуществляется прибором Рω (рис. 4). Потенциометр RPLM3 предназначен для регулирования ЭДС МПТ М3.
Ваттметр типа Д306 предназначен для точной фиксации ЧВ ИХХ ИД. Частотомер PF предназначен для измерения частоты питающей сети.
Подготовка лабораторной установки к работе
Перед работой убедитесь, что рубильник Q2 разомкнут. Вначале при разомкнутом рубильнике Q2 автоматом QF1 пускается в ход АД М4, причем он остается включенным до окончания всех опытов; подается напряжение на регулятор напряжения ТУ1и по нему устанавливается пониженное напряжение питания ИД (по заданию преподавателя). Переводом рукоятки переключателя Q1 з положение «ДР, РТ, ТП» пускается в ход ИД.
Включением автомата QF2 подается питание на обмотки возбуждения LM2 и LM3.
Переключателем SA и вольтметром PV2 производится проверка напряжения на зажимах якоря МПТ М2 и МЗ. В общем случае напряжение этих машин при произвольном положении ползунков Rlm2 и RPlm3 могут отличаться как по величине, так и по знаку. В этом случае установив реостатом Rlm2 номинальный ток возбуждения М2 и перемещая ползунки потенциометра RPlm3 и соответствующие положения, устанавливается напряжение на якоре машины МЗ, равное по величине и знаку тому напряжению, которое имеет машина М2. После достижения этого рубильником Q2 замыкается якорная цепь машин М2 и МЗ и тем самым установка приводится а состояние полной готовности для снятия ЭМХ.
В опытах измеряются параметры ЧВ, тока статора и активной мощности ИД, тока якоря и возбуждения МПТ М2, а также напряжение писан;:» ИД.
В процессе проведения опытов для каждого режима работы ИД необходимо записать 6-8 показаний.
Результаты измерений заносятся в таблицу 1.
Таблица 1
Режим работы ИД |
|
№№ п.п. |
Измерения |
Вычисления |
|||||
n, об/мин |
I1,А |
Iя,А |
Iв,А |
P, Вт |
Ω, рад/с. |
М, Нм |
|||
РТ |
Uоп = |
|
|
|
|
|
|
|
|
Точка ЧВ ИХХ |
|
|
|
|
|
|
0 |
|
|
ДР |
|
|
|
|
|
|
|
|
|
ТПВ |
|
|
|
|
|
|
|
|
|
ДТ |
Iп= |
|
|
|
|
|
|
|
|
Iп= |
|
|
|
|
|
|
|
|
|
Кривая потерь МПТ М2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|